Изобретение относится к машиностроению, касается усовершенствования захватных головок манипуляторов, и может найти применение в различных областях техники.
Цель изобретения - расширение техно- логических возможностей путем захвата разнообразных по форме деталей.
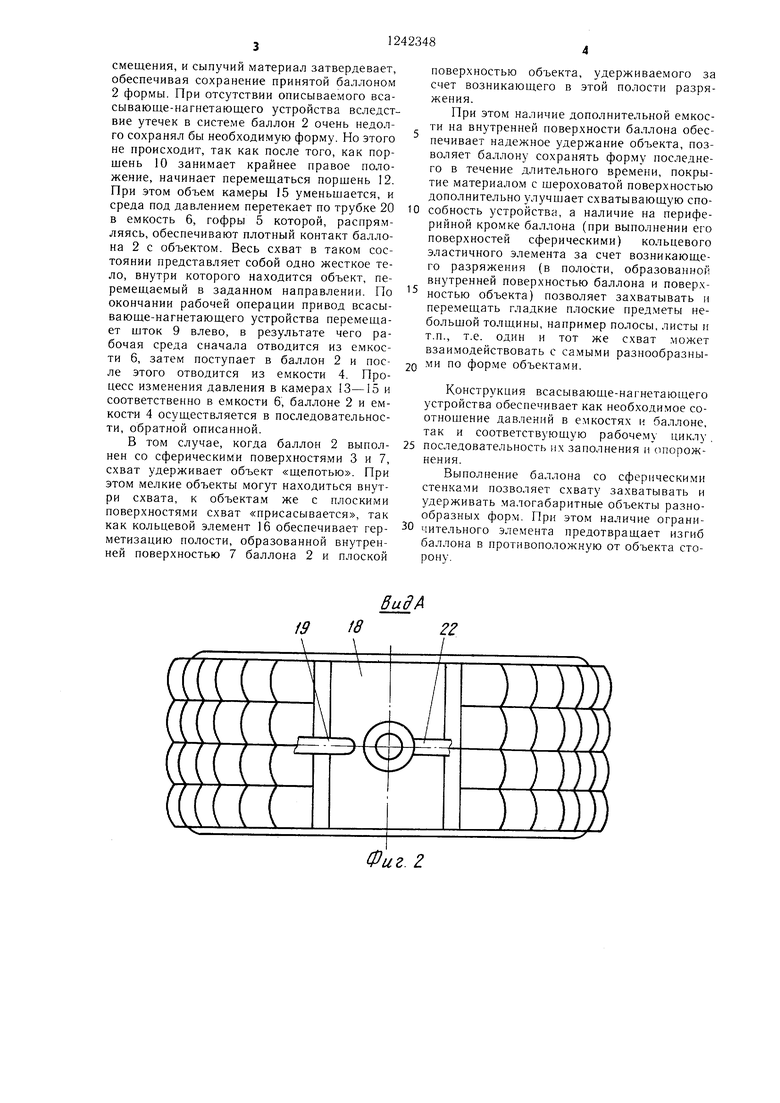
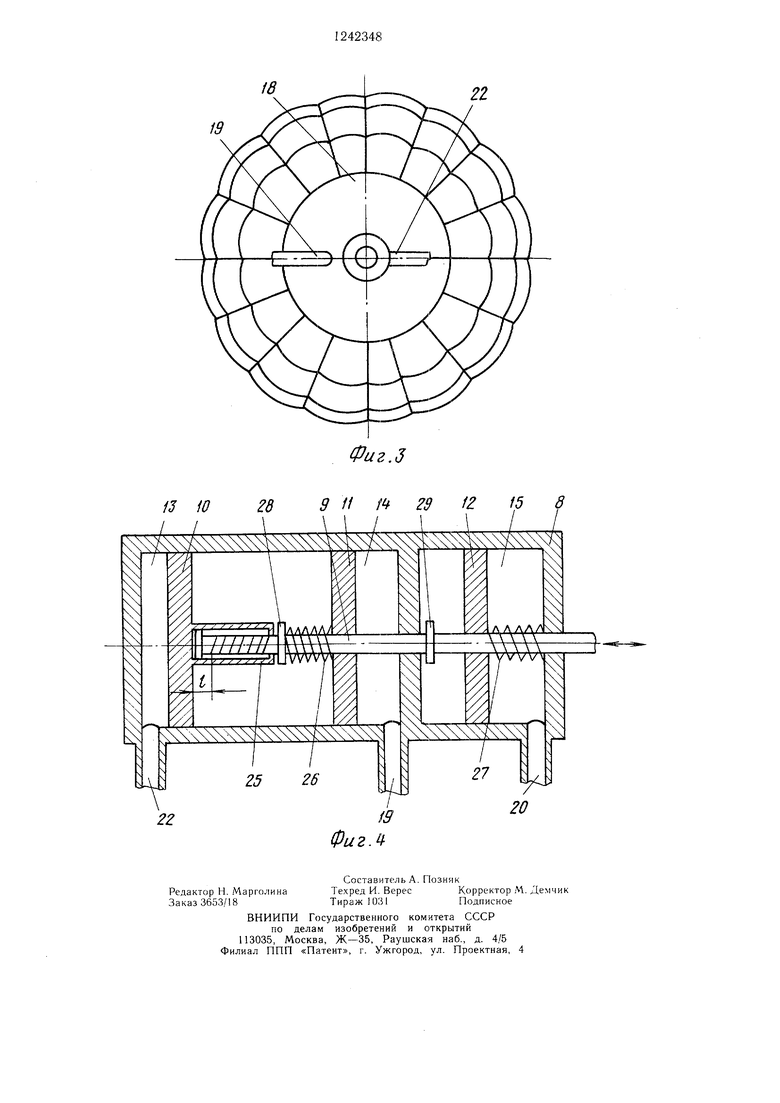
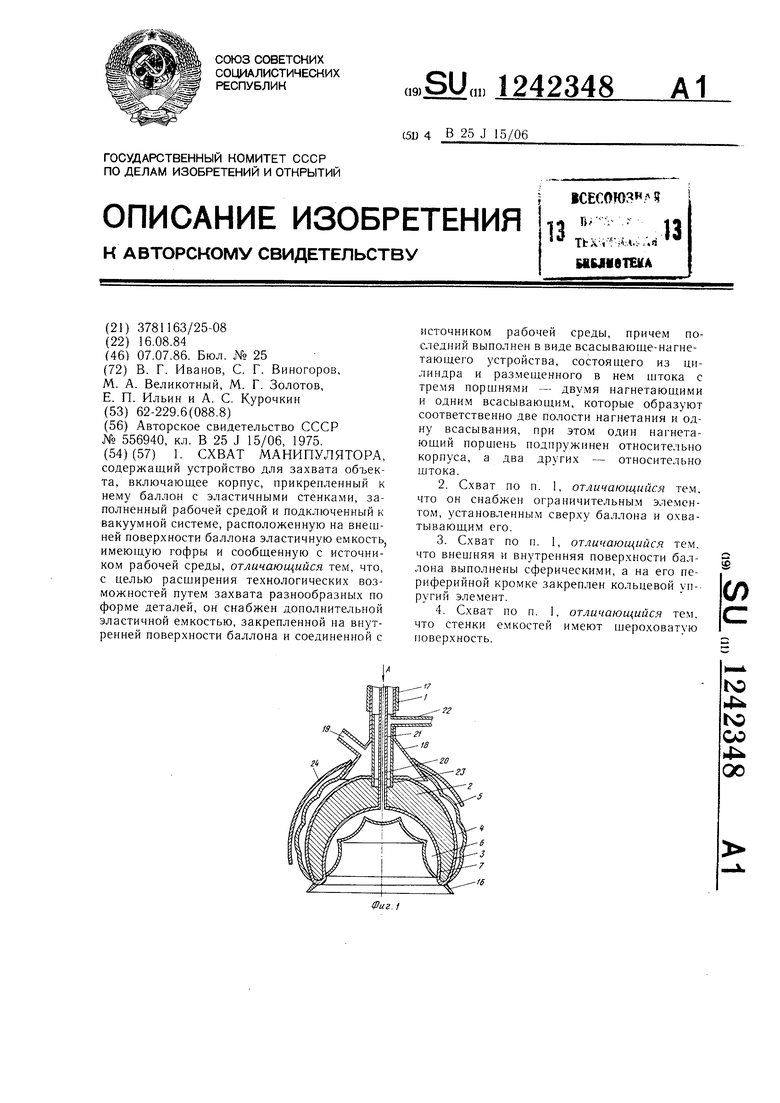
На фиг. 1 схематично изображен схват манипулятора, продольный разрез; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вариант выполнения баллона со сферическими внеш- ней и внутренней поверхностями; на фиг. 4 - всасываюн 1е-нагнетающее устройство.
Схват манипулятора содержит корпус 1, прикрепленный к нему баллон 2 с эластичными стенками, заполненный рабочей средой и подключенный к вакуумной системе (не показана), расположенную на внешней поверхности 3 баллона 2 эластичную емкость 4, имеющую гофры 5 и сообщенную с источником рабочей среды (не показан). Схват манипулятора содержит эластичную емкость 6, закрепленную на внутренней поверхности 7 баллона 2 (фиг. 1, 2) и соединенную с o6iUHM источником рабочей среды всасываю- ще-на нетающим устройством, которое выполнено ц виде цилиндра 8 и размещенного в нс.м штока 9 с поршнями 10-12, разделяюп ими полость цилиндра 2 на камеры 13- 15, сообщенные с емкостями 4 и 6 и балло11 ,;м 2 (фиг. 4). П гок 9 связан с приволХ);. (не показано), обеспечивающи.м его возврагяо-поступательпое перемещение. Стенки емкостей 4 и 6 имеют покрытие из материала с шероховатой поверхностью.
В вари;;: те выполнения схвата внешняя и внутренняя ;1оверхности 3 и 7 баллона 2 выполнены 1ч :-: рическими, а на его периферийной кромке закреплен кольцевой упругий элемент 16 (фиг. 3).
Схват закреплен на руке 17 манипулятора.
Схват содержит коллектор 18, подключен- нный iiocpeziCTBOM трубки 19 к всасывающе- нагнетающему устройству и сообщенный с емкостью 4. liMKocTE) 6 подключена посредством трубки 20 также к всасывающе-на- гнетающему устройстр.у.
Схват соде) коллектор 21, подключен- ный носредство.м трубки 22 к всасываюш.е- нагнетаюп1ему устройству и снабженный на входе фи;1ьтром 23, предотвращающим унос сынуче го 1 чятерипла в вакуумную систе.му.
1гмкости 4 и 6 могут быть выпо;1нены в виде шлангов, имеющих гофры 5 на наружной 1)бразующей.
В качестве рабочей среды могут быть использованы газообразные (воздух, инертные газы и т.п.) и жидкие (вода, масло и т.п.) среды. Предпочтительным является вариант выполнения, в соответствии с которым откачиваемая из баллона 2 среда поступает в емкости 4 и 6.
О
0
0
5
0
Баллон 2 заполнен сыпучим материалом, например песком, тальком, измельченной пластмассой и т.д.
Коллекторы 18 и 21 и трубки 19, 20 и 22 снабжены заиорно-регулирующей арматурой (не показана).
Схват снабжен ограничительным элемен- то.м 24, обхватывающим баллон 2. При выполнении схвата, изображенного на фиг. 1 и 2, ограничительный элемент 24 выполнен в виде изогнутых пластин, прикрепленных с противоположных сторон к коллектору 18. При выполнении баллона 2 сферическим (фиг. 1 и 3) ограничительный элемент 24 также выполнен сферическим (в виде чащи, купола и т.п.) и прикреплен по периметру коллектора 18. На фиг. 2 и 3 ограничительный элемент 24 не показан. Шток снабжен пружинами 25--27, а порщни 10-12 установлены на нем с возможностью ограниченного осевого перемещения. Шток и.меет бурты 28 и 29.
Может быть предусмотрен вариант выполнения, в соответствии с которым емкости 4 и 6 перегородками разделены на отдельные камеры, заполняемые рабочей средой последовательно или выборочно.
Схват манипулятора работает следующим образом.
В исходном положении давление внутри баллона 2 и камер 4 и 6 равн о атмосферному (гофры 5 находятся в сложенном состоянии) .
При движении руки 17 манипулятора схват подводится к объекту, включается привод всасывающе-нагнетающего устройства. При этом перемещение штока 9 с поршнями 10-12 вызывает изменение объема камер 13-15 и соответствующее изменение давления в полостях баллона 2 и емкостей 4 и 6. Причем пружины 25-27 установлены так, что обеспечивают последовательное изменение объемов камер 13-15 при движении штока 9 в одном направлении. При движении штока 9 вправо сначала перемещается поршень 11, поджимаемый пружиной 26, опирающейся на бурт 28. При этом объем камеры 14 уменьщается, и среда под давлением по трубке 19 поступает в емкость 4. Под действие.м давления рабочей среды гофры 5 распрямляются и сводят копны баллона 2, который плотно обхватывает перемещаемый объект, принимая его форму. После того, как будет выбран зазор f, с которым пружина 25 установлена относительно поршня 10, последний преодолевая сопротивление пружины 25, начипает перемещаться вправо. При этом объем камеры 13 увеличивается, и среда из баллона 2 по трубке 22 перетекает в зону пониженного давотения - камеру 13. Частицы сыпучего Материала, заполняющего баллон 2, под действием перепада давления (повышенного снаружи и пониженного внутри) теряют способность относительного
смещения, и сыпучий материал затвердевает, обеспечивая сохранение принятой баллоном 2 формы. При отсутствии описываемого вса- сывающе-нагнетающего устройства вследствие утечек в системе баллон 2 очень недолго сохранял бы необходимую форму. Но этого не происходит, так как после того, как поршень 10 занимает крайнее правое положение, начинает перемещаться поршень 12. При этом объем камеры 15 уменьшается, и среда под давлением перетекает по трубке 20 в емкость 6, гофры 5 которой, распрямляясь, обеспечивают плотный контакт баллона 2 с объектом. Весь схват в таком состоянии представляет собой одно жесткое тело, внутри которого находится объект, пе- ремеш,аемый в заданном направлении. По окончании рабочей операции привод всасы- вающе-нагнетаюшего устройства перемещает шток 9 влево, в результате чего рабочая среда сначала отводится из емкости 6, затем поступает в баллон 2 и после этого отводится из емкости 4. Процесс изменения давления в камерах 13-15 и соответственно в емкости 6, баллоне 2 и емкости 4 осуществляется в последовательности, обратной описанной.
В том случае, когда баллон 2 выполнен со сферическими поверхностями 3 и 7, схват удерживает объект «щепотью. При этом мелкие объекты могут находиться внутри схвата, к объектам же с плоскими поверхностями схват «присасывается, так как кольцевой элемент 16 обеспечивает герметизацию полости, образованной внутренней поверхностью 7 баллона 2 и плоской
поверхностью объекта, удерживаемого за счет возникающего в этой полости разряжения.
При этом наличие дополнительной емкости на внутренней поверхности баллона обеспечивает надежное удержание объекта, позволяет баллону сохранять форму последнего в течение длительного времени, покрытие материалом с шероховатой поверхностью дополнительно улучшает схватывающую способность устройства, а наличие на периферийной кромке баллона (при выполнении его поверхностей сферическими) кольцевого эластичного элемента за счет возникающего разряжения (в полости, образованной внутренней поверхностью баллона и поверхностью объекта) позволяет захватывать и перемещать гладкие плоские предметы небольшой толщины, например полосы, листы и т.п., т.е. один и тот же схват .может взаимодействовать с самыми разнообразными по форме объектами.
Конструкция всасывающе-нагнетающего устройства обеспечивает как необходимое со- отнощение давлений в емкостях и баллоне, так и соответств) ющую рабоче.му циклу,
последовательность их заполнения и опорожнения.
Выполнение баллона со сферическими стенками позволяет схвату захватывать и удерживать .малогабаритные объекты разнообразных форм. При этом наличие ограничительного элемента предотвращает изгиб баллона в противоположную от объекта сторону.
Фиг. 2
w
19
22
Фиг,3
13 W
22
29 f2 15 8
20
Фиг Л
Составитель А. 1озняк
Техред И. ВересКорректор М. Демчик
Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4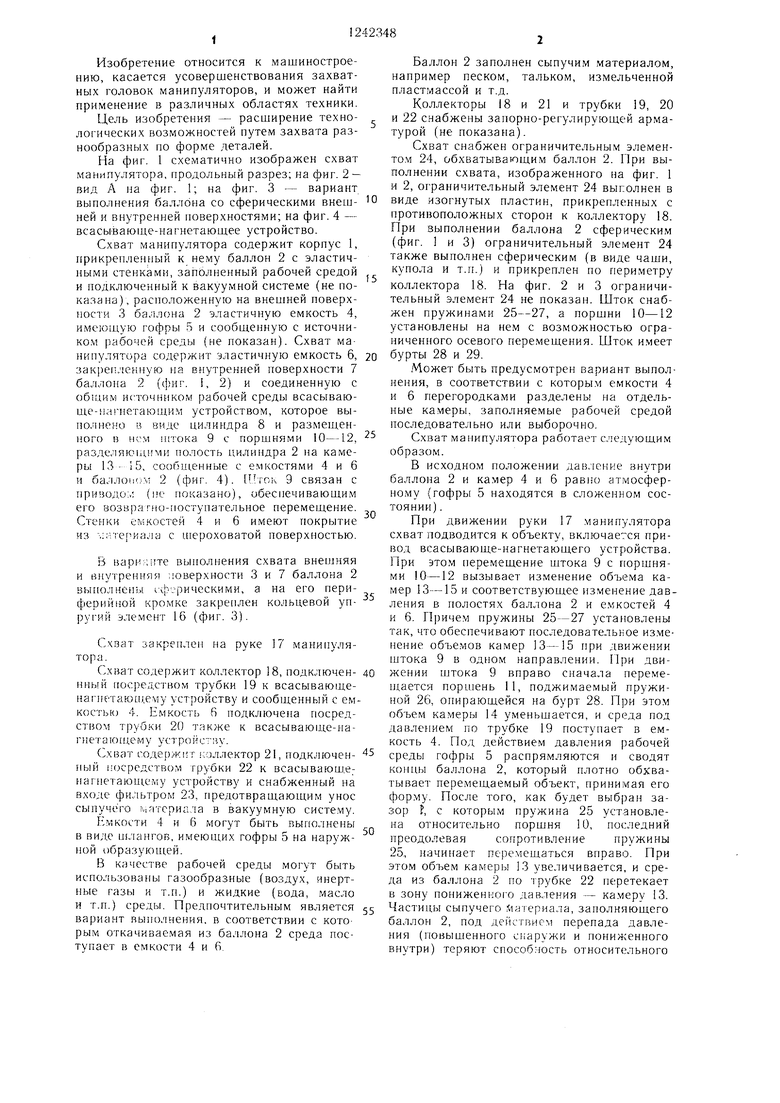
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват | 1990 |
|
SU1811477A3 |
| Захват манипулятора | 1975 |
|
SU556940A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ГИДРОДИНАМИЧЕСКОГО СОПРОТИВЛЕНИЯ КОРПУСА СУДНА НА СЖАТОМ ПНЕВМОПОТОКЕ | 2019 |
|
RU2720754C1 |
| Манипулятор | 1989 |
|
SU1657370A1 |
| Устройство для преддоильной обработки вымени и доения животных | 1986 |
|
SU1349735A1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Манипулятор | 1983 |
|
SU1183360A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1227457A1 |
| Захват манипулятора | 1975 |
|
SU556940A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
