Изобретение относится к машиностроению, в частности к оборудованию кузнечно- прессового производства, и может быть использовано в системах управления гидравлических прессов.
Цель изобретения - повышение производительности работы пресса путем уменьшения времени декомпрессии за счет учета люфта.
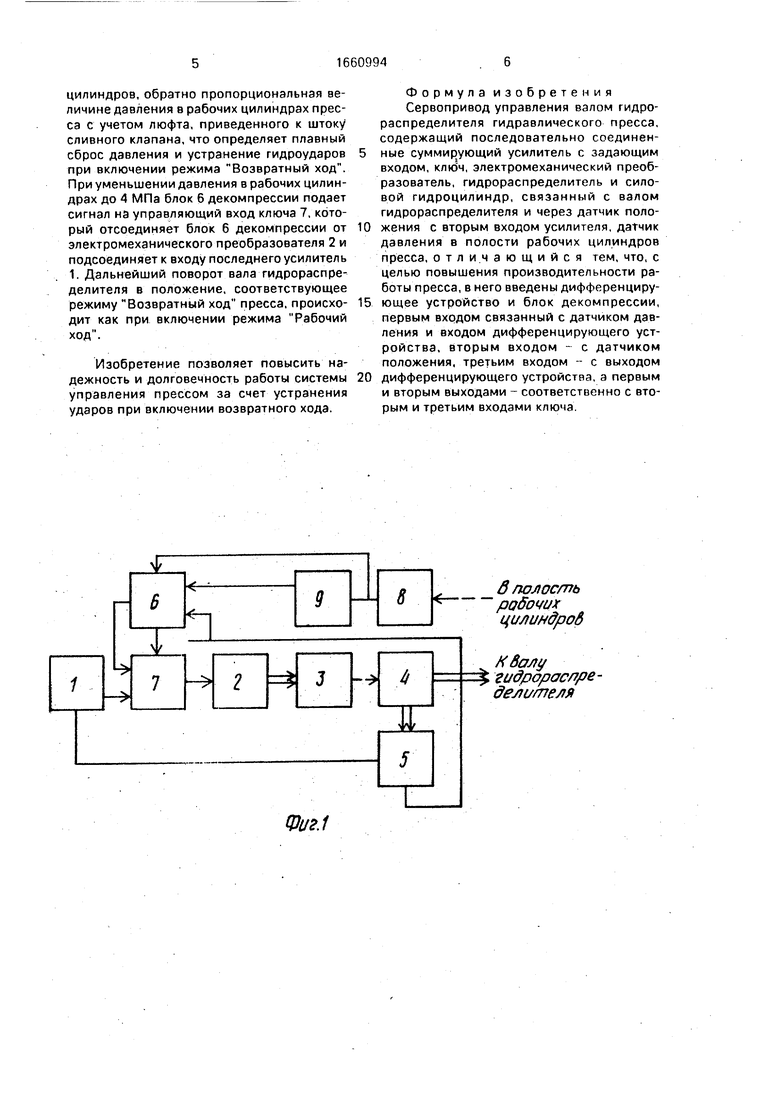
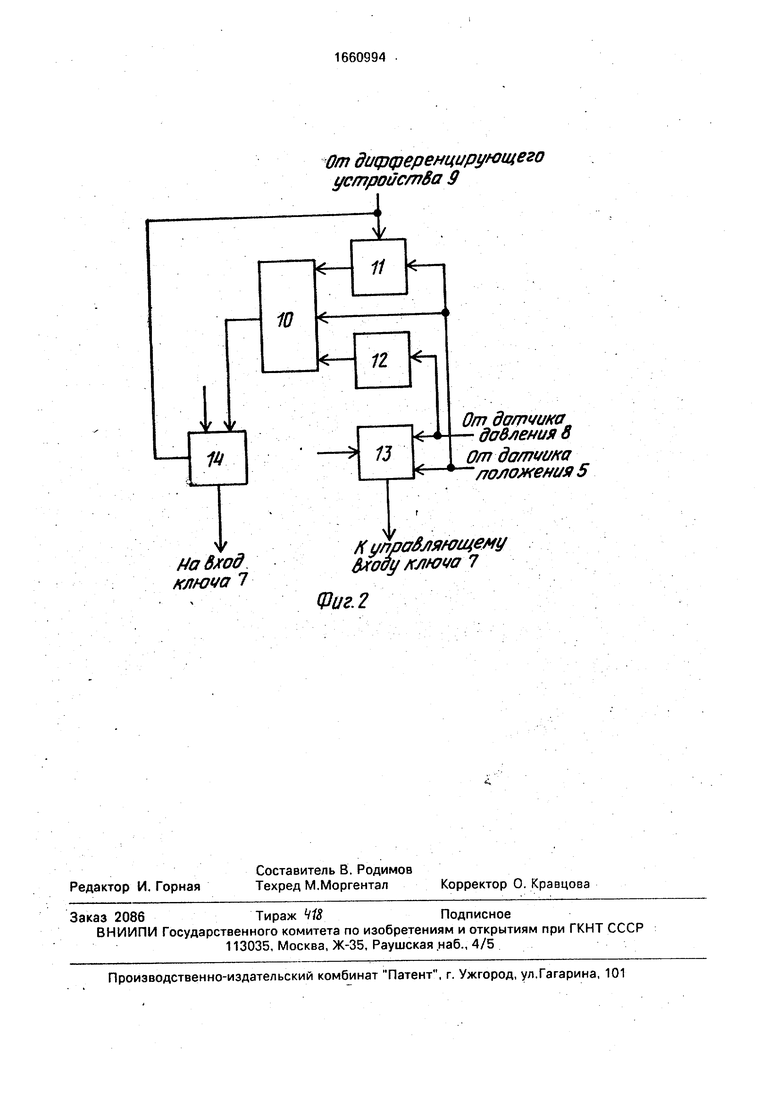
На фиг. 1 представлена структурная схема предлагаемого сервопривода; на фиг. 2 - структурная схема блока декомпрессии.
Сервопривод содержит усилитель 1 и последовательно соединенные электромеханический преобразователь 2, гидроусилитель 3 и силовой гидроцилиндр 4, связанный с валом гидрораспределителя и через датчик 5 положения с вторым входом усилителя 1, блок 6 декомпрессии, ключ 7, датчик 8 давления и дифференцирующее устройство 9. При этом блок 6 декомпрессии соединен выходами с управляющим и вторым входом ключа 7, а входами - с выходами датчика 5 положений, дифференцирующего устройства 9 и датчика 8 давления, связанного входом с полостями рабочих цилиндров пресса и выходом с входом дифференцирующего устройства 9. Ключ 7 соединен входом с выходом усилителя 1, а выходом - с входом электромеханического преобразователя 2.
о о о чэ о
4
Блок 6 декомпрессии содержит усилитель
10,аналоговое запоминающее устройство
11,функциональный преобразователь 12, компаратор 13, ключ 14. Усилитель 10 соединен с ключом 14, аналоговым запоминающим устройством 11, датчиком 5 положения и через функциональный преобразователь 12с датчиком 8 давления. Компаратор 13 связан с управляющим входом ключа 7 и датчиками положения 5 и давления 8. Аналоговое запоминающее устройство 11 соединено с датчиком 5 положения и дифференцирующим устройством 9, которое связано с управляющим входом ключа 14, соединенного с входом ключа 7.
Сервопривод работает следующим образом.
Электрический сигнал, пропорциональный углу поворота вала гидрораспределителя в положение, соответствующее режиму Рабочий ход, поступающий на первый вход усилителя 1, суммируется с сигналом, пришедшим с выхода датчика 5 положения, усиливается и поступает через ключ 7 на вход электромеханического преобразователя 2, который, воздействуя на гидроусилитель 3, подает рабочую жидкость в силовой гидроцилиндр 4, поворачивающий вал гидрораспределителя. При подходе вала гидрораспределителя к заданному положению позиционирования сигнал, на выходе усилителя 1 уменьшается и становится равным нулю при достижении валом гидрораспределителя заданного положения позициони- рования.Электромеханический
преобразователь 2, воздействуя на гидроусилитель 3, прекращает подачу рабочей жидкости в силовой гидроцилиндр, который останавливает вал гидрораспределителя в заданном положении позиционирования. Далее при подаче команды на первый вход усилителя 1 на поёорот Возвратный ход происходит поворот вала в указанное положение. При этом при переходе валом нейтрального положения (соответствующего останову подвижной поперечины) и одновременном наличии давления в рабочих цилиндрах выше 4 МПа соответственно по сигналам с выходов датчиков положения 5 и давления 8, которые поступают на вход компаратора 13 блока 6 декомпрессии, компаратор 13, воздействуя на управляющий вход ключа 7, отсоединяет усилитель 1 от электромеханического преобразователя 2 и через ключ 7 подает на вход электромеханического преобразователя 2 электрический сигнал на продолжение поворота вала гидрораспределителя в положение, соответствующее режиму Возвратный ход. Этот электрический сигнал формируется на выходе ключа 14. Т.е., на управляющем выходе блока 6 декомпрессии формируется сигнал на переключение ключа 7 при одновременном выполнении двух условий: при переходе валом нейтрального положения и при величине давления в рабочих цилиндрах пресса свыше 4 МПа. Нарушение какого-либо из этих условий приводит к снятию упр зз- ляющего сигнала на переключение ключа 7.
0 При декомпрессии снятие управляющего сигнала происходит при нарушении втор го условия - величины давлений в рабочих цилиндрах. Сигнал на выходе ключа 14 блока б декомпрессии, поступающий через ключ 7
5 на вход электромеханического преобразователя 2, имеет постоянную величину. Пропорционально ему электрический преобразователь 2 открывает гидроусилитель 3, определяя скорость перемещения
0 штока силового гидроцилиндра 4. Величина этого сигнала может выбираться из разных условий, Например, уровень сигнала должен задать такую скорость перемещения вала гидрораспределителя, чтобы устранить
5 динамические удары в конце выбора люфтов. При выборе люфтов, приведенных к штоку сливного клапана рабочих цилиндров, последний остается закрытым. Величина давления в рабочих цилиндрах не
0 изменяется, и на выходе дифференцирующего устройства 9 присутствует нулевой уровень сигнала.
После выбора люфтов открытие сливного клапана приводит к изменению давления
5 в рабочих цилиндрах и изменению сигнала на выходе датчика 8 давления, связанного с входом дифференцирующего устройства 9, что определяет появление сигнала на выходе последнего. Этот сигнал и является ко0 мандой для блока б декомпрессии о конце выбора зазора под сливным клапаном рабочих цилиндров. По фронту этого сигнала с выхода дифференцирующего устройства 9 аналоговое запоминающее устройство 11
5 запоминает сигнал с выхода датчика 5 положения, пропорциональный зазору, приведенному к штоку сливного клапана рабочих цилиндров, и подает этот сигнал на вход усилителя 10, на другие входы которого по0 ступает сигнал с выхода датчика 5 положения и сигнал, обратно пропорциональный величине давления в рабочих цилиндрах, с выхода функционального преобразователя 12
Кроме того, сигнал с выхода дифферен5 цирующего устройства 9, воздействуя на управляющий вход ключа 14, отсоединяет сигнал постоянного уровня с входа ключа 7 и подает на вход поспеднего сигнал с выхода усилителя 10. Этим определяется величина открытия сливного клапана рабочих
цилиндров, обратно пропорциональная величине давления в рабочих цилиндрах пресса с учетом люфта, приведенного к штоку сливного клапана, что определяет плавный сброс давления и устранение гидроударов при включении режима Возвратный ход. При уменьшении давления в рабочих цилиндрах до 4 МПа блок 6 декомпрессии подает сигнал на управляющий вход ключа 7, который отсоединяет блок 6 декомпрессии от электромеханического преобразователя 2 и подсоединяет к входу последнего усилитель 1. Дальнейший поворот вала гидрораспределителя в положение, соответствующее режиму Возвратный ход пресса, происхо- дит как при включении режима Рабочий ход.
Изобретение позволяет повысить надежность и долговечность работы системы управления прессом за счет устранения ударов при включении возвратного хода.
0 5
0
Формула изобретения Сервопривод управления валом гидрораспределителя гидравлического пресса, содержащий последовательно соединенные суммирующий усилитель с задающим входом, ключ, электромеханический преобразователь, гидрораспределитель и силовой гидроцилиндр, связанный с валом гидрораспределителя и через датчик положения с вторым входом усилителя, датчик давления в полости рабочих цилиндров пресса, отличающийся тем, что, с целью повышения производительности работы пресса, в него введены дифференцирующее устройство и блок декомпрессии, первым входом связанный с датчиком давления и входом дифференцирующего устройства, вторым входом - с датчиком положения, третьим входом - с выходом дифференцирующего устройства, а первым и вторым выходами - соответственно с вторым и третьим входами ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1989 |
|
SU1726279A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1660995A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1691137A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1581602A1 |
| Следящая система управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1548083A1 |
| Сервопривод клапанов гидрораспределителя гидравлического пресса | 1990 |
|
SU1810223A1 |
| Сервопривод вала гидрораспределителя гидравлического пресса | 1987 |
|
SU1490002A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1643181A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1990 |
|
SU1756174A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
Изобретение относится к машиностроению, в частности к оборудованию кузнечно-прессового производства и может быть использовано в системах управления гидравлических прессов. Цель изобретения - повышение производительности работы пресса путем уменьшения времени декомпрессии за счет учета люфта. Срвопривод содержит усилитель, ключ, электромеханический преобразователь, гидроусилитель, датчик положения штока силового гидроцилиндра, датчик давления в полости рабочих цилиндров, дифференцирующее устройство и блок декомпрессии. Применение блока декомпрессии позволяет повысить надежность и долговечность системы управления прессом, так как он определяет моменты начала и конца плавного сброса давления из рабочих цилиндров при включении режима. Возвратный ход, задает закон сброса давления из рабочих цилиндров, определяя открытие сливного клапана рабочих цилиндров на величину, обратно пропорциональную величине давления в рабочих цилиндрах. При этом величина открытия клапана задается с учетом люфта, приведенного к штоку клапана, что исключает гидроудар в гидросистему пресса. 2 ил.
Фиг.1
б полость
flofiowx
цилиндров
К балу %. гидрорасяре- de/it/теля
От дифференцирующего устройства 9
L
W
/
Ку бхо
(Риг. 2
i
От датчика - давления о
Ofn датчика положения 5
/
Куправляющему бходуключа 7
