Изобретение относится к машиностроению, в частности к конструкциям оборудования управления обработкой металлов давлением.
Цель изобретения - повышение надежности и долговечности работы за счет устранения гидравлических ударов при включении возвратного хода.
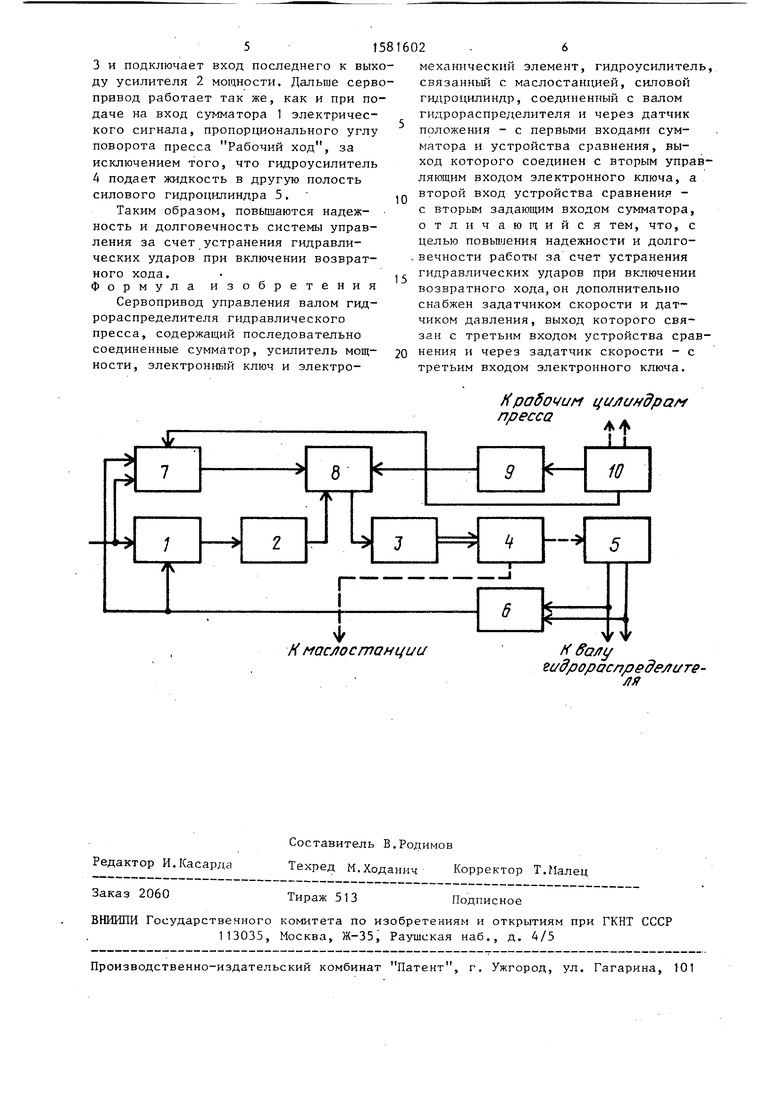
На чертеже представлена структурная схема сервопривода управления валом гидрораспределителя гидравлического пресса.
Сервопривод содержит сумматор 1, соединенный с усилителем 2 мощности, последовательно связанные электромеханический управляющий элемент 3,
гидроусилитель 4, связанный с масло- станцией, силовой гидроцилиндр 5, соединенный с валом гидрораспределителя и через датчик 6 положения - с первыми входами сумматора 1 и устройством 7 сравнения, электронный ключ 8, задатчик 9 скорости и датчики 10 давления. Причем устройство 7 сравнения соединено с вторым входом сумматора 1, с выходом датчика 6 положения, с выходом датчиков 10 давления и с управляющим входом электронного ключа 8, который своим выходом связан с электромеханическим управляющим элементом 3, первым входом - с выходом усилителя 2 мощности,
СП
оо
а третьим входом - с выходом задат- чика 9 скорости, который соединен с датчиком 10 давления, связанным с полостями рабочих цилиндров пресса.
Сервопривод работает следующим образом.
Электрический сигнал, пропорциональный углу поворота вала гидрораспределителя в. положение, соответствующее режиму Рабочий ход, поступает на вход сумматора I, где суммируются с сигналом, пришедшим с выхода датчика 6 положения,усиливается усилителем 2 мощности и через электронный ключ 8 поступает на вход электромеханического управляющего элемента 3, который, воздействуя на гидроусилитель 4, подает рабочую жидкость в полость силового гидроцилиндра 5. Последний, в свою очередь, поворачивает вал гидрораспределителя в положение, соответствующее режиму работы пресса рабочий ход.
При достижении заданного положения позиционирования вала гидрораспределителя, сигнал на выходе датчика 6 положения становится равным сигналу, пришедшему на вход сумматора 1, но имеет противоположный знак, и на выходах сумматооа 1, усилителя 2 мощности, на входе электромеханического управляющего элемента величина электрического сигнала становится равной нулю. Электромеханический управляющий элемент 3, воздействуя на гидроусилитель 4, прекращает подачу рабочей жидкости в полость силового гидроцилиндра 5, и вал гидрораспреде- ,лителя, связанный со штоком силового гидроцилиндра 5, останавливается в заданном положении позиционирования, соответствующем режиму Рабочий ход
Далее, при появлении на входе сумматора 1 электрического сигнала, пропорционального углу поворота вала гидрораспределителя в положение, соответствующее режиму работы пресса Возвратный ход, сервопривод работает аналогичным образом до момента достижения валом гидрораспределп- теля нейтрального положения (останов подвижной поперечины пресса), за исключением того, что теперь гидроусилитель 4 подает рабочую жидкость в другую полость силового гидроцилиндра 5. Достижение валом гидрораспределителя нейтрального положения характеризуется остановом подвижной поперечины пресса, при наличии на входе сумматора 1 сигнала, пропорционального углу поворота вала гидрораспределителя в положение, соответствующее режиму работы пресса Возвратный ход, и при максимальном давлении в рабочих цилиндрах пресса больше 4-6 МПа. Причем выполнение
этих условий определяется устройством 7 сравнения, благодаря его связям соответственно с датчиком 6 положения, сумматором 1 и датчиками 10 давления.
5 Устройство 7 сравнения подает
сигнал на управляющий вход электронного ключа 8, который отсоединяет выход усилителя 2 мощности от входа электромеханического управляющего
Q элемента 3, и подключает к входу последнего задатчик 9 скорости, на входе которого формируется сигнал датчиками 10 давления, пропорциональный максимальному давлению в ра5 бочих цилиндрах пресса, а на выходе - сигнал, пропорциональный величине открытия эпектромеханическим управляющим элементом 3 гидроусилителя 4. Последний дросселируя поток
Q рабочей жидкости, поступающей в полость силового гидроцилиндра 5, связанного с валом гидрораспределителя, определяет скорость поворота последнего, а следовательно, и скорость открытия сливных клапанов рабочих цилиндров пресса.
Задатчик 9 скорости, воздействуя через электронный ключ 8 и электромеханический управляющий элемент 3 Q на гидроусилитель 4, определяет скорость поворота силовым гидроцилиндром 5 вала гидрораспределителя в положение, соответствующее режиму Возвратный ход, т.е. скорость отс крытия сливных клапанов рабочих цилиндров пресса, величина которой обратно пропорциональна максимальному давлению в рабочих цилиндрах пресса. При этом,, чем больше давление в рабочих цилиндрах пресса,тем дольше будет идти их разгрузка (сброс давления в рабочих цилиндрах пресса). При падении давления в рабочих цилиндрах пресса до 4-6 МПа, по команде датчиков 10 давления устройство 7 сравнения подает сигнал на электронный ключ 8, который отсоединяет задатчик 9 скорости от входа электро механического управляющего элемента
0
515
3и подключает вход последнего к выходу усилителя 2 мощности. Дальше сервопривод работает так же, как и при подаче на вход сумматора 1 электрического сигнала, пропорционального углу поворота пресса Рабочий ход, за исключением того, что гидроусилитель
4подает жидкость в другую полость силового гидроцилиндра 5.
Таким образом, повышаются надежность и долговечность системы управления за счет устранения гидравлических ударов при включении возвратного хода. Формула изобретения
Сервопривод управления валом гидрораспределителя гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электронный ключ и электро1602
механический элемент, гидроусилитель, связанный с маслостанцией, силовой гидроцилиндр, соединенный с валом гидрораспределителя и через датчик положения - с первыми входами сумматора и устройства сравнения, выход которого соединен с вторым управляющим входом электронного ключа, а второй вход устройства сравнения - с вторым задающим входом сумматора, отличающийся тем, что, с целью повышения надежности и долговечности работы за счет устранения гидравлических ударов при включении возвратного хода,он дополнительно снабжен задатчиком скорости и датчиком давления, выход которого связан с третьим входом устройства сравнения и через задатчик скорости - с третьим входом электронного ключа.

Изобретение относится к машиностроению, в частности к конструкции систем управления кузнечно-прессового оборудования. Цель изобретения - повышение надежности и долговечности работы системы управления. Сервопривод содержит сумматор, усилитель мощности, электронный ключ, электромеханический управляющий элемент, гидроусилитель, связанный с маслостанцией, силовой гидроцилиндр, датчики положения и давления, задатчик скорости и устройство сравнения. Для исключения гидроудара в магистраль слива в режиме возвратного хода при остановленной подвижной поперечине пресса и при давлении в рабочем цилиндре больше требуемого по сигналу с устройства сравнения электронный ключ отключает выход усилителя мощности и подключает к входу электромеханического элемента задатчик скорости. Последний, воздействуя на гидроусилитель, определяет скорость открытия сливных клапанов рабочих цилиндров пресса таким образом, что чем больше будет давление в рабочих цилиндрах, тем больше будет идти их разгрузка. 1 ил.
М масло с та ни, и и
Редактор И.Касарда
Составитель В.Родимов
Техред М.Ходанпч Корректор Т.Малец
Заказ 2060
Тираж 513
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
К рабочим цилиндрам прессаА
К балу еидрораслределиге-
Подписное
| Следящая система управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1504103A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
