СЛ С
| название | год | авторы | номер документа |
|---|---|---|---|
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1989 |
|
SU1726279A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1581602A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1660994A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1660995A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1691137A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1988 |
|
SU1720894A1 |
| Электрогидравлический следящий привод | 1989 |
|
SU1754918A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1643181A1 |
| Следящая система управления валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1548083A1 |
Использование: системы управления гидравлическим прессом. Сущность: сервопривод содержит сумматор 1 и последовательно соединенные усилитель 2 мощности, электромеханический преобразователь 3, гидроусилитель 4 и силовой гидроцилиндр 5, соединенный с валом гидрораспределителя и через датчик 6 положения с вторым входом сумматора 1, компараторы 7, 8; ключи 9, 10, 11, 12; дополнительный сумматор 13. Ключи 9, 10, 11, 12 соединены с дополнительным сумматором 13, первый вход которого связан через компаратор 7 с датчиком 6 положения, а второй вход- через компаратор 8 с первым ключом 9, выход которого соединен с ключом 10, а выход последнего связан с первым входом сумматора 1, третий вход которого соединен с ключами 11, 12. Изобретение направлено на повышение надежности и долговечности работы сервопривода. 1 ил.
/Г балу гидро- распревели - теля
vl СЛ О
v 4
Изобретение относится к области машиностроения, в частности к конструкциям оборудования управления обработкой металлов давлением.
Известен сервопривод управления валом гидрораспределителя гидравлического пресса, выполненный в виде последовательно соединенных рукоятки управления с системой тяг и качалок, распределителя, гидромотора, связанного с валом гидрораспределителя, который механической обратной связью соединен с распределителем.
Этому сервоприводу свойственны следующие недостатки: недостаточно высокая точность и производительность ковки, большие усилия на рукоятке управления, недостаточно высокая надежность и долговечность работы.
Наиболее близким по технической сущности к предлагаемому является сервопривод управления валом гидрораспределения гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, соединенный с валом гидрораспределителя и через датчик положения - с вторым входом сумматора,
Этому сервоприводу свойственны недостаточно высокая надежность и долговечность работы, что связано со следующим.
Недостаточно высокий уровень обслуживания и изменяющиеся при эксплуатации параметры сервопривода приводят к нарушению масштабов задания и обратной связи, что при сигнале рассогласования, близком к максимальному, при водит к уд ару движущегося с большой скоростью поршня силового гидроцилиндра по крышке, что может п ривести к срыву последней с крепящих ее к корпусу силового гидроцилиндра шпилек.
Кроме того, при управлении сервоприводом системой автоматического управления при нарушении нормального функционирования последней или при наладке сервопривода величина сигнала рассогласования может превысить максимально допустимую, что также приведет к динамическому удару поршня силового гид- роцилиндра о его крышку, что может вы- звать как нарушение герметичности, так и разрушение элементов конструкции. В свою очередь, резкое торможение поршня приводит и к гидравлическому удару.
Цель изобретения - повышение надежности и долговечности работы сервопривода.
Поставленная цель достигается тем, что известный сервопривод, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, соединенный с валом
гидрораспределителя и через датчик положения - с вторым входом сумматора снабжен двумя компараторами, четырьмя ключами и дополнительным сумматором, при этом все ключи соединены управляю0 щими входами с выходом дополнительного сумматора, первый вход которого связан через первый компаратор с выходом датчика положения, а второй вход через второй компаратор с входом первого ключа,
5 выход первого ключа соединен с входом второго ключа, выход последнего связан с первым входом сумматора, третий вход которого соединен с выходами третьего и четвертого ключей.
0 Применение в сервоприводе ключей позволяет повысить надежность и долговечность работы, так как при подходе поршня силового гидроцилиндра к своему крайнему положению, и подаче команды на вход сер5 вопривода на его дальнейшее перемещение в том же направлении, в зависимости от полярности сигнала задания и сигнала с выхода датчика положения первый или второй ключ отсоединяет сигнал задания от перво0 го входа сумматора, а третий или четвертый ключ подает на третий вход сумматора сигнал постоянного уровня,отработав который сервопривод остановит поршень силового гидроцилиндра без удара и о крышку гидро5 цилиндра и связанного с этим гидроудара. Применение взаимосвязанных двух компараторов и дополнительного сумматора позволяет повысить надежность и долговечность работы сервопривода, так как они
0 определяют момент остановки поршня силового гидроцилиндра для устрэнения его удара о крышку гидроцилиндра и связанного с этим гидроудара.
В технике известно применение компа5 раторов и дополнительных сумматоров, первые из которых определяют превышение входным сигналом порогового уровня, а вторые осуществляют функцию суммирования входных сигналов. Однако появление
0 новых, неизвестных ранее связей компараторов с датчиком положения, входом первого ключа и с дополнительным сумматором, связанным выходом с управляющими входами четырех ключей определило появле5 ние новой, неизвестной ранее функции блока компараторы -дополнительный сумматор - определение момента начала торможения поршня силового гидроцилиндра для устранения гидроудара и динамического удара о крышку гидроцилиндра. Это позволяет повысить надежность и долговечность работы сервопривода.
В технике известно применение ключей, осуществляющих функцию рассоединения электрических связей. Однако появление новых, неизвестных ранее связей четырех ключей управляющими входами с дополнительным сумматором, первого ключа с вторым ключом и с вторым компаратором, второго, третьего и четвертого ключей с дополнительным сумматором определило и новую, неизвестную ранее функцию, - при подходе поршня силового гидроцилиндра к своему крайнему положению обеспечить возможность торможения поршня для устранения гидравлического и динамического ударов. Это способствует повышению надежности и долговечности работы сервопривода.
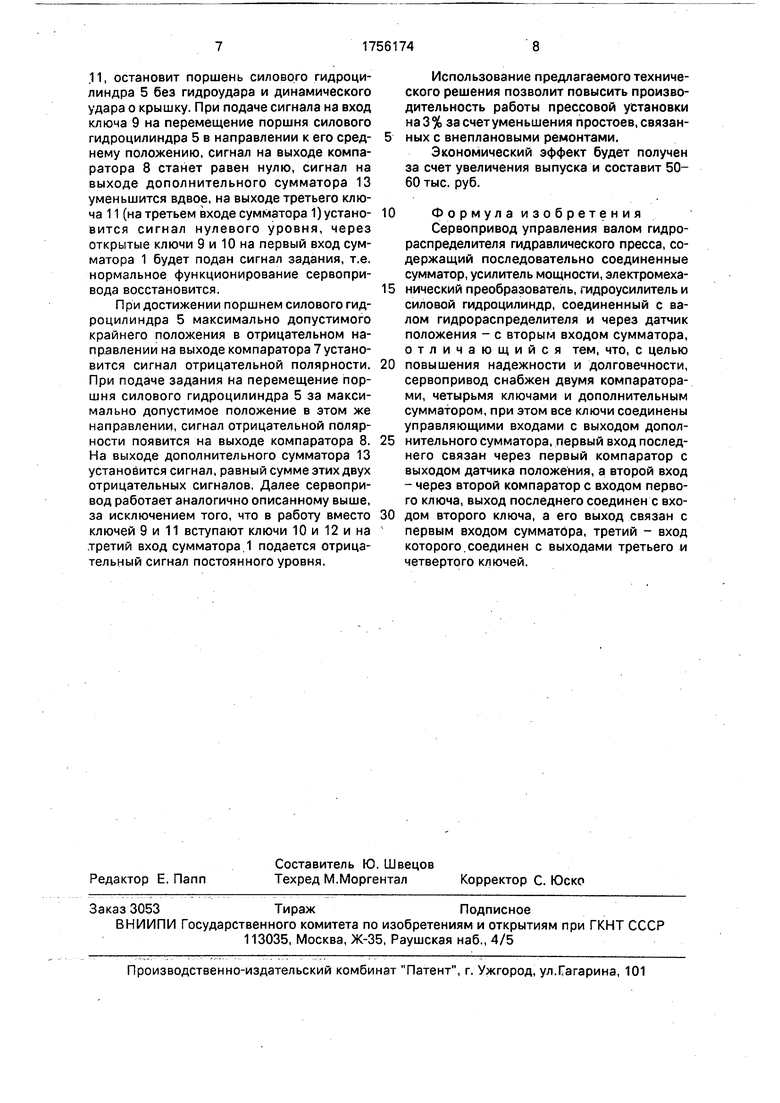
На чертеже представлена структурная схема сервопривода управления валом гидрораспределителя гидравлического пресса.
Сервопривод содержит последовательно соединенные сумматор 1, усилитель 2 мощности, электромеханический преобразователь 3, гидроусилитель 4 и силовой гидроцилиндр 5, соединенный с валом гидрораспределителя и через датчик б положения - с вторым входом сумматора 1, два компаратора 7 и 8, четыре ключа 9-12 и дополнительный сумматор 13. Ключи 9-12 соединены управляющими входами с выходом дополнительного сумматора 13,первый вход которого связан через первый компаратор 7 с выходом датчика 6 положения, а второй вход - через второй компаратор 8 с входом первого ключа 9, на который подается сигнал задания. Выход первого ключа 9 соединен с входом второго ключа 10, а выход последнего связан с первым входом сумматора 1, третий вход которого соединен с выходом третьего 11 и четвертого 12 ключей, на входы которых подаются сигналы постоянного уровня соответственно положительной и отрицательной полярности.
Сервопривод работает следующим образом. При нахождении поршня силового гидроцилиндра 5 вне зон, где необходимо формировать его торможение для устранения гидроудара в магистрали и динамического удара о крышку гидроцилиндра, сигнал задания поступает через ключи 9 и 10 на первый вход сумматора 1, где из него вычитается сигнал с выхода датчика 6 положения, поступающий на инверсный вход того же сумматора. В этом случае на выходах ключей 11 и 12, связанных с третьим входом сумматора 1, присутствует сигнал нулевого уровня.
Полученная разность сигналов с выхода сумматора 1 поступает на вход усилителя 2 мощности, где усиливается и подается на вход электромеханического преобразовате- 5 ля 3, который, воздействуя на входной шток гидроусилителя 4, подает рабочую жидкость в полость силового гидроцилиндра 5, поворачивающего вал гидрораспределителя в заданное положение позиционирования,
0 при достижении которого сигналы на первом (прямом) и втором (инверсном), входе сумматора 1 станут равны, разность сигналов на выходе сумматора 1 станет равна нулю и электромеханический преобразова5 тель 3 вернет шток гидроусилителя 4 в нейтральное положение. Это приведет к прекращению подачи рабочей жидкости в полость силового гидроцилиндра 5, шток которого остановит вал гидрораспределителя
0 в заданном положении позиционирования. Нарушение при наладке масштабов задания и обратной связи или нарушение нор- мального функционирования системы автоматического управления или наладка
5 сервопривода может привести к превышению сигналом рассогласования максимально допустимой величины, что может вызывать гидроудар и динамический удар поршня силового гидроцилиндра 5 об его
0 крышку.
Устранению указанных явлений способствует применение компараторов 7 и 8, ключей 9-12 и дополнительного сумматора 13. Рассмотрим движение поршня силово5 го гидроцилиндра 5 в положительном (по полярности напряжения на выходе датчика 6 положения) направлении от среднего положения. При достижении поршнем силового гидроцилиндра 5 максимально
0 допустимого крайнего положения на выходе первого компаратора 7 появляется положительный сигнал. При подаче сигнала задания на продолжение перемещения поршня силового гидроцилиндра 5 за максимально
5 допустимое крайнее положение в положительном направлении положительный сигнал появляется на выходе второго компаратора 8. При наличии двух положительных сигналов на выходах компараторов
0 7 и 8 на выходе дополнительного сумматора 13 появится сигнал, равный их сумме, который приведет к открытию третьего ключа 11, последний подаст положительный сигнал постоянного уровня на третий вход сумма5 тора 1. Одновременно с этим же сигнал с выхода дополнительного сумматора 13 закроет ключ 9, отсоединив сигнал задания от первого входа сумматора 1. Таким образом, сервопривод, отработав сигнал задания, сформированный на выходе третьего ключа
.11, остановит поршень силового гидроцилиндра 5 без гидроудара и динамического удара о крышку. При подаче сигнала на вход ключа 9 на перемещение поршня силового гидроцилиндра 5 в направлении к его среднему положению, сигнал на выходе компаратора 8 станет равен нулю, сигнал на выходе дополнительного сумматора 13 уменьшится вдвое, на выходе третьего ключа 11 (на третьем входе сумматора 1) установится сигнал нулевого уровня, через открытые ключи 9 и 10 на первый вход сумматора 1 будет подан сигнал задания, т.е. нормальное функционирование сервопривода восстановится.
При достижении поршнем силового гидроцилиндра 5 максимально допустимого крайнего положения в отрицательном направлении на выходе компаратора 7 установится сигнал отрицательной полярности. При подаче задания на перемещение поршня силового гидроцилиндра 5 за максимально допустимое положение в этом же направлении, сигнал отрицательной полярности появится на выходе компаратора 8. На выходе дополнительного сумматора 13 установится сигнал, равный сумме этих двух отрицательных сигналов. Далее сервопривод работает аналогично описанному выше, за исключением того, что в работу вместо ключей 9 и 11 вступают ключи 10 и 12 и на третий вход сумматора 1 подается отрицательный сигнал постоянного уровня.
Использование предлагаемого технического решения позволит повысить производительность работы прессовой установки наЗ% засчетуменьшения простоев, связан- ных с внеплановыми ремонтами.
Экономический эффект будет получен за счет увеличения выпуска и составит 50- 60 тыс. руб.
Ф о р м у л а и з о б р ет е н и я
Сервопривод управления валом гидрораспределителя гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, соединенный с валом гидрораспределителя и через датчик положения - с вторым входом сумматора, отличающийся тем, что, с целью
повышения надежности и долговечности, сервопривод снабжен двумя компараторами, четырьмя ключами и дополнительным сумматором, при этом все ключи соединены управляющими входами с выходом дополнительного сумматора, первый вход последнего связан через первый компаратор с выходом датчика положения, а второй вход - через второй компаратор с входом первого ключа, выход последнего соединен с входом второго ключа, а его выход связан с первым входом сумматора, третий - вход которого соединен с выходами третьего и четвертого ключей.
| Хохлов В,А | |||
| Электрогидравлический следящий привод | |||
| - М.: Наука, 1966, с | |||
| Камневыбирательная машина | 1921 |
|
SU222A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| XI. | |||
