Изобретение относится к вакуумным манипуляторам высоковакуумных установок для электронной спектроскопии.
Целью изобретения является расшире- ние функциональных возможностей за счет обеспечения вращения держателя образца вокруг горизонтальной оси.
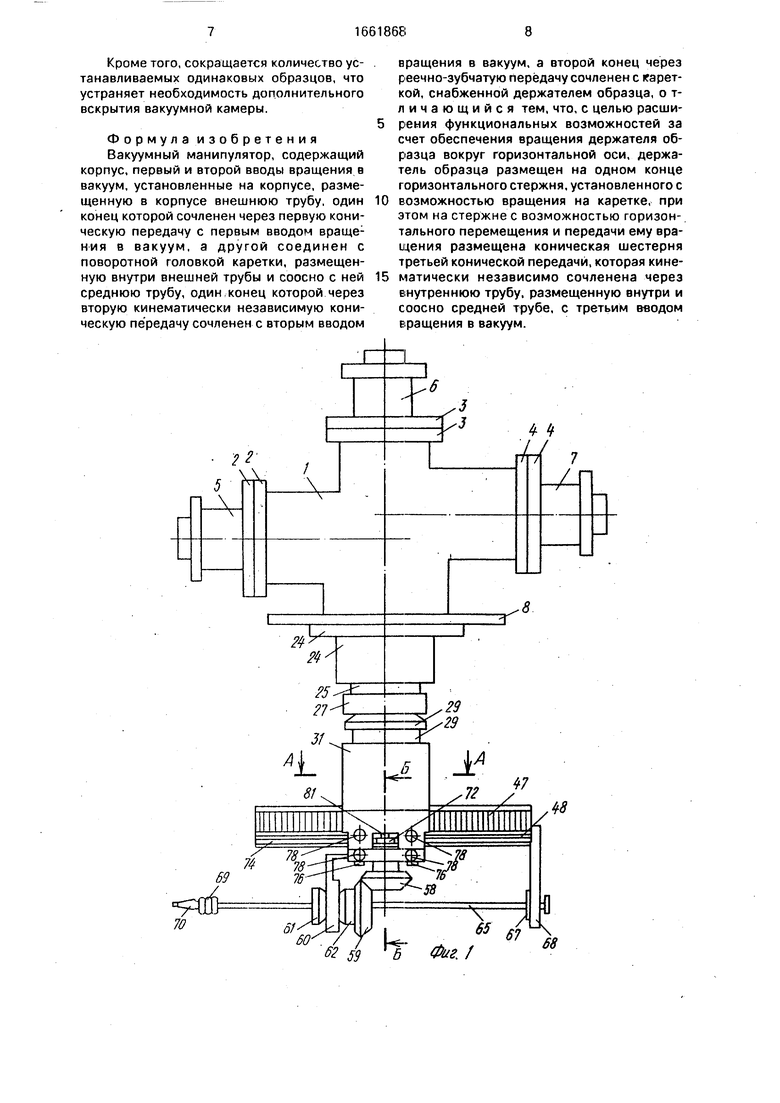
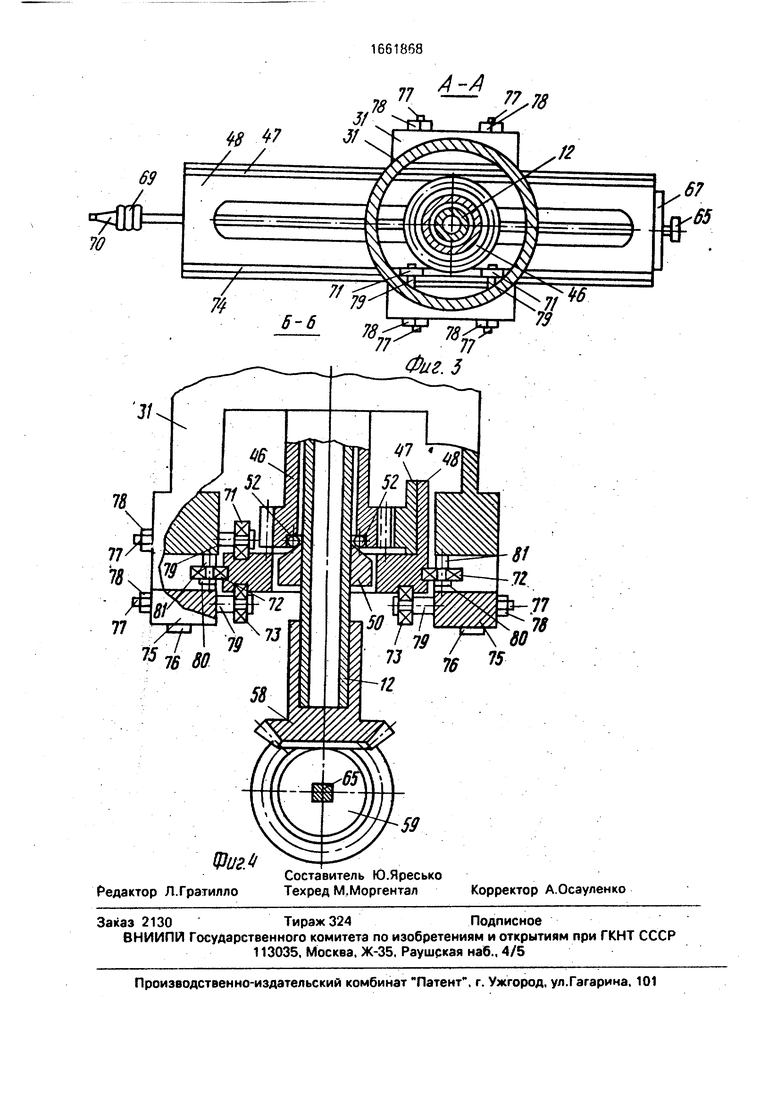
На фиг.1 изображен манипулятор, общий вид; на фиг.2 - вакуумная часть мани- пулятора, сечение; на фиг.З -сечение А-А на .фиг.1; на фиг.4 - сечение Б-Б на фиг.1.
Манипулятор (фиг,1) состоит из металлического корпуса 1, на котором посредством фланцевых соединений 2 - 4 соответственно закреплены вакуумные вводы 5 - 7 вращения. В нижней части корпуса 1 расположен фланец 8, с помощью которого обеспечивается герметическая установка манипулятора на вакуумную камеру 9 (фиг.2).
Вакуумная часть манипулятора (фиг.2) содержит внешнюю трубу 10, среднюю трубу 11 и внутреннюю трубу 12, расположенные соосно и внутри друг друга. При этом они передают кинематически независимо вращение в вакууме от первого ввода 5, второго ввода 6 и третьего ввода 7 внутрь камеры 9.
Труба 10 своим верхним концом по- средством зубчатой конической передачи, состоящей из колес 13 и 14, связана с вакуумным вводом 5 вращения. При этом колесо
13жестко связано с трубой 10, а колесо 14 установлено на подшипниках 15 и 16 с по- мощью втулок 17 и 18, закрепленных в корпусе 1. На оси зубчатого конического колеса
14жестко закреплена втулка 19 с диаметрально-противоположно закрепленными на ней с помощью гаек 20 стержнями 21. По- следние заходят в диаметрально противоположные отверстия втулки 22, жестко закрепленной на валу 23 ввода 5 вращения. Для создания устойчивого вращательного движения зубчатого конического колеса 13 внизу фланца 8 крепятся втулка 24, труба 25
и втулки 26 и 27, соответственно жестко связанные друг с другом. Между втулкой 26 и зубчатым колесом 13 расположены насыпные шарики 28. Для обеспечения вращения трубы 10 параллельно вертикальной оси симметрии манипулятора на нижнем конце трубы 10 жестко крепится втулка 29, подпирающая насыпные шарики 30 к втулке 27 и жестко связанная с поворотной голо- вкой31.
Труба 11 своим верхним концом посредством зубчатой конической передачи, состоящей из зубчатых колес 32 и 33, связана с вводом 7 вращения. Зубчатое колесо 32, жестко связанное с трубой 11, опирается на насыпные шарики 34, расположенные в полости зубчатого колеса 13. Крепление колеса 33 осуществляется аналогично креплению колеса 14 с помощью подшипников.35 и 36 и втулок 37 и 38. Связь оси конического колеса 33 с валом 39 ввода 7 вращения осуществляется при помощи втулок 40 и 41, стержней 42 и гаек 43. При этом втулки 40 и 41 жестко посажены на ось конического зубчатого колеса 33 и вал 39 соответственно, а стержни 42 закреплены на втулке 40 и заходят в соответствующие им отверстия втулки 41.
В нижней части трубы 11 расположены жестко связанные с ней втулка 44, подпирающая насыпные шарики 45, расположенные в полости втулки 29, и закрепленная на трубе 11 шестерня 46, образующая с зубчатой рейкой 47, закрепленной на подвижной каретке 48, реечно-зубчатую передачу 46 и 47.
Труба 12 расположена коаксиально внутри трубы 11, проходит сквозь продольный паз подвижной каретки 48 (фиг.2 и 3) и удерживается в вертикальном положении с помощью жестко.расположенных на них нтулок 49 и 50. подпирающих насыпные шарики 51 и 52 к коническому зубчатому колесу 32 и шестерне 46 соответственно. Связь трубы 12с валом 53 ввода 6 вращения осуществляется при помощи втулок 54 и 55, стержней 56 и гаек 57. Своим нижним концом труба 12 посредством зубчатой конической передачи, состоящей из колес 58 и 59. связана с кронштейном 60. При этом зубчатое коническое колесо 58 жестко закреплено на нижнем конце трубы 12, а зубчатое коническое колесо 59 с помощью закрепленных на нем втулок 61 и 62 и подпираемых ними шариков 63 и 64 соответственно удерживается на кронштейне 60, жестко закреплённом на поворотной головке 31. Наличие насыпных шариков 63 и 64 дает колесу 59 возможность вращательного движения вокруг своей оси симметрии. В центре зубчатого колеса 59 имеется отверстие, в котором расположен стержень 65. один конец которого посредством шариков 66 и пластины 67 связан с кронштейном 68, жестко закрепленным на подвижной каретке 48, а на втором конце закреплены гофрированный керамический изолятор 69 и захват 70 держателя образца. Для обеспечения возвратно-поступательного движения стержня 65 и передачи ему вращательного движения зубчатого конического колеса 59 отверстие в колесе 59-и сам стержень 65 выполнены в форме многогранника.
На фиг.З и 4 изображено взаимное расположение поворотной головки 31 с направляющими подшипниками 71 - 73. шестерни
46 и рейки 47. а также трубы 12, зубчатой конической передачи 58 и 59 и многогранного стержня 65.
Поворотная головка 31 в своей верхней части имеет цилиндрическую форму, затем переходящую в прямоугольную. В боковой части головки 31 имеется П-об- тразный вырез, в котором располагается подвижная каретка 48. Для обеспечения возвратно-поступательного перемещения в подвижной каретке 48 имеется продольный паз (фиг.З), сквозь который проходит труба 12, расположенная внутри шестерни 46 (фиг.4). Шестерня 46 посредством шариков 52, находящихся в ее полости, опирается на закрепленную на трубе 12 втулку 50 и находится в зацеплении с зубчатой рейкой 47, закрепленной на подвижной каретке 48. Для устранения перек-осов последней и регулировки степени зацепления шестерни 46 и зубчатой рейки 47 в подвижной каретке 48 имеются пазы 74 (фиг.1, 3 и 4), которыми она опирается на направляющие подшипники 71 - 73. Подшипники 71 и 72 крепятся на одной из стенок поворотной головки 31, а подшипники 73 - на двух прямоугольных пластинах 75, закрепленных на поворотной головке 31 с помощью винтов 76.
Крепление подшипников 71 и 73 аналогично и Состоит из фиксирующих винтов 77 с гайками 78, проходящих сквозь стенку головки 31 (или пластины 75) и втулок 79, посаженных на винты 76, и расположенных между подшипниками 71 и 73 и стенками головки 31 и пластинами 75 соответственно. Подшипники 72 устанавливаются в П-образ- ных пазах в стенках головки 31 (фиг.1 и 4) с помощью винтов 80 и втулок 81.
Манипулятор работает следующим образом.
Вращательное движение вакуумного ввода 5 посредством вала 23. втулок 19 и 22, а также стержней 21 преобразуется во вращательное движение зубчатого конического колеса 14, затем через зубчатое колесо 13 передается жестко связанной с ним трубе 10, закрепленным на ней втулке 29 и поворотной головке 31 с направляющими подшипниками 71 - 73 и, следовательно, преобразуется во вращательное движение подвижной каретки 48 и захвата 70 держателя образца со стержнем 65 в горизонтальной плоскости на 360°. Вращательное движение ввода 7 через вал 39 в втулки 40 и 41, стержни 42, зубчатую коническую передачу 33 и 34 преобразуется во вращательное движение трубы 11, которое посредством реечно-зубчатой передачи 46
и 47 преобразуется затем в возвратно-поступательное движение каретки 48 в горизонтальной плоскости по направляющим подшипникам 71 - 73. Вращательное дви- 5 жение вакуумного ввода 5 с помощью вала 53, втулок 54 и 55 и стержней 56 передается трубе 12, а затем посредством конической зубчатой передачи 58 и 59 преобразуется во вращательное движение стержня 65 и за0 крепленного на нем захвата 70 держателя образца. Следовательно, вращение вакуумных вводов 5 и 7 обеспечивает возвратно- поступательное перемещение образца в горизонтальной плоскости на расстояние
5 порядка длины зубчатой рейки 47 и поворот образца на 360° в горизонтальной плоскости, а вращение вакуумного ввода 6 обеспечивает вращение образца вокруг своей оси в вертикальной плоскости на 360°, что очень
0 важно при исследованиях одного и того же образца разными методами в одной и той же вакуумной камере.
Вакуумным манипулятором заявляемой конструкции была оснащена высоко5 вакуумная установка для исследования поверхности образцов с применением методик фотоэлектронной, электронно- ионной, ионно-электронной спектроскопии, дифракции медленных электронов.
0 Максимально достижимый вакуум составляет ... мм рт.ст.
Манипулятор монтировался на вакуумных фланцах проходным диаметром 100 мм, В качестве центральной, средней и внешней
5 соосных труб использовались трубы из нержавеющей стали длиной 463, 400 и 300 мм и диаметром 17, 33 и 43 мм соответственно. Параметры введенной трубы, обеспечивающей вращение захвата держателя образца
0 вокруг своей оси от третьего вакуумного ввода, составляют 540 мм (длина) и 8 мм (диаметр). Реечно-зубчатая передача состояла из шестерни диаметром 20 мм и зубчатой рейки длиной 100 мм; передаточное
5 число применяемых конических зубчатых передач 1:1. Максимальное расстояние от оси камеры можно регулировать перемещением кронштейна со стержнем и захватом держателя образца подвижной каретки. Ма0 нипулятор оснащен кассетой со сменными образцами.
Использование вакуумного манипулятора позволяет расширить рабочую зону ма- нипулятора, его функциональные
5 возможности, повышает производительность установки, т.е. в результате сокращается время подготовки эксперимента и уменьшаются погрешности за счет точной установки образца в нужное для исследований положение.
Кроме того, сокращается количество устанавливаемых одинаковых образцов, что устраняет необходимость дополнительного вскрытия вакуумной камеры.
Формула изобретения Вакуумный манипулятор, содержащий корпус, первый и второй вводы вращения в вакуум, установленные на корпусе, размещенную в корпусе внешнюю трубу, один конец которой сочленен через первую коническую передачу с первым вводом вращения в вакуум, а другой соединен с поворотной головкой каретки, размещенную внутри внешней трубы и соосно с ней среднюю трубу, один конец которой через вторую кинематически независимую коническую передачу сочленен с вторым вводом
вращения в вакуум, а второй конец через реечно-зубчатую передачу сочленен с кареткой, снабженной держателем образца, о т- личающийся тем, что, с целью расширения функциональных возможностей за счет обеспечения вращения держателя образца вокруг горизонтальной оси, держатель образца размещен на одном конце горизонтального стержня, установленного с
возможностью вращения на каретке, при этом на стержне с возможностью горизонтального перемещения и передачи ему вращения размещена коническая шестерня третьей конической передачи, которая кинематически независимо сочленена через внутреннюю трубу, размещенную внутри и соосно средней трубе, с третьим вводом вращения в вакуум.
70
5-6
31
Фиг
Редактор Л.Гратилло
Составитель Ю.Яресько Техред М.Моргентал
,18
- ъя
.-, rtT
78тР 1F
Фиг. 5
59
Корректор А.Осауленко
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 1985 |
|
SU1302352A1 |
| Вакуумный координатный столик | 1990 |
|
SU1798949A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Устройство для абразивной обработки | 1985 |
|
SU1367849A3 |
| МАШИНА ДЛЯ ВЫКАЧИВАНИЯ ВОЗДУХА ИЗ ЖЕСТЯНОК И ЗАКРЫВАНИЯ ИХ | 1929 |
|
SU38520A1 |
| Устройство для установки радиоэлементов на печатные платы | 1990 |
|
SU1709575A1 |
| Манипулятор для внутреннего контроля цилиндрических резервуаров | 1985 |
|
SU1442089A3 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2179920C2 |
| Устройство для исследования поверхности твердого тела | 1985 |
|
SU1324079A1 |
Изобретение относится к вакуумным манипуляторам высоковакуумных установок для электронной спектроскопии. Целью изобретения является расширение функциональных возможностей за счет обеспечения вращения держателя образца вокруг горизонтальной оси. Манипулятор содержит корпус 1, на котором посредством фланцевых соединений 2, 3, 4 закреплены вакуумные вводы 5, 6, 7 вращения. В нижней части корпуса расположен фланец 8, с помощью которого обеспечивается герметичная установка манипулятора на вакуумную камеру 9. С помощью ввода 7 вращения осуществляется поворот объектодержателя 70 вокруг его оси. 4 ил.
| Rovleru of Scientific Instruments, 57 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кренометр | 1923 |
|
SU487A1 |
| Вакуумный манипулятор | 1985 |
|
SU1302352A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
