Изобретение относится к вакуумным манипуляторам высоковакуумных металлических установок для электронной спектроскопии.
Целью изобретения является расширение функциональных возможностей манипулятора и повышение его производительности путем обеспечения возвратно-поступательного перемеш,ения исследуемого образца в горизонтальной плоскости и смены исследуемых образцов в вакууме.
На фиг. 1 изображен манипулятор, обш,ий вид; на фиг.2 - взаимное расположение каретки с захватом, головки с направляющими и реечно-зубчатой передачи; на фиг.4 - кассета со сменными образцами, общий вид; на фиг.5 и 6 - взаимное расположение манипулятора и кассеты со сменными образцами в вакуумной камере.
Манипулятор (фиг.1) содержит центральную 1, среднюю 2 и внешнюю 3 соосные трубы с блоками oJapикoпoдшипникoв. Внешняя труба 3 через втулку 4 неподвижно закреплена на первом вакуумном фланце 5, к нему же прикреплен внешний корпус манипулятора 6 с первым 7 и вторым 8 вакуумными вводами вращения. На средней трубе 2 внизу закреплена головка 9 с направляющими 10 движения, а через первую коническую зубчатую передачу, состоящую из колес 11 и 12, своим верхним концом она связана с первым вводом 7 вращения. Центральная труба 1 своим верхним концом связана через вторую коническую зубчатую передачу из колес 13 и 14 со вторым вводом 8 вращения, а своим нижним концом она связана через реечно-зубчатую передачу, состоящую из шестерни 15 и рейки 16, с кареткой 17, на которой закреплен через кронштейн 18 и керамический изолятор 19 захват 20 держателя образца с шариком 21 и пружиной 22.
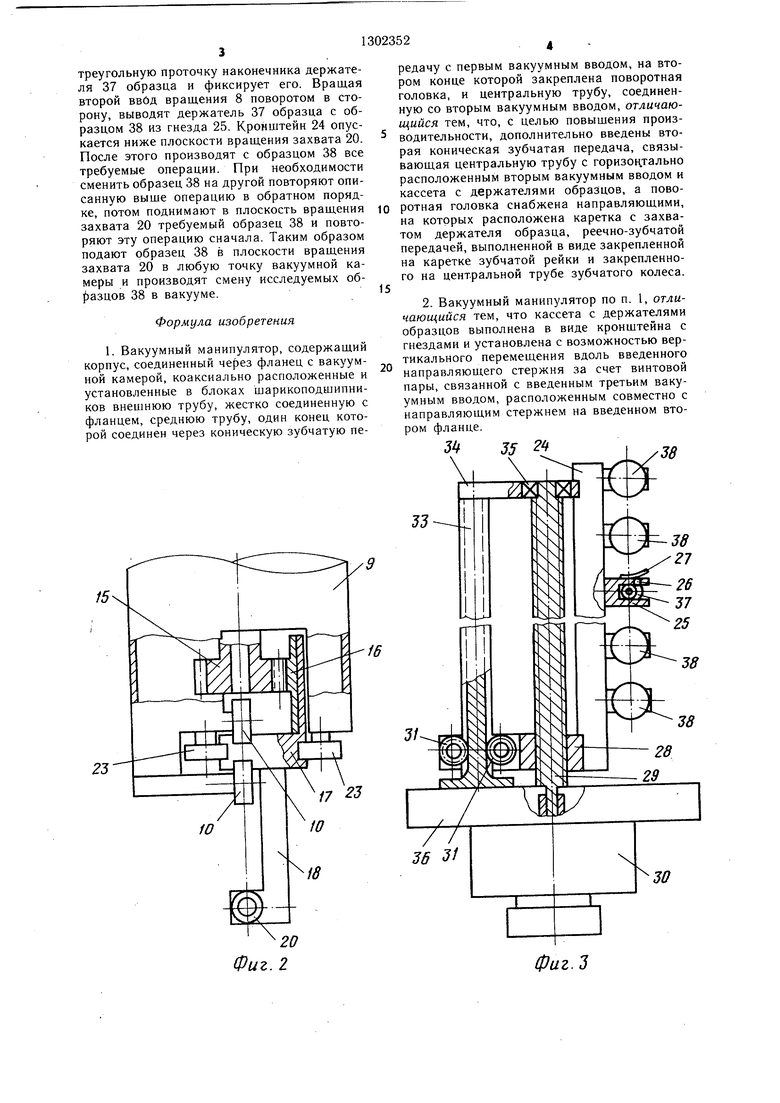
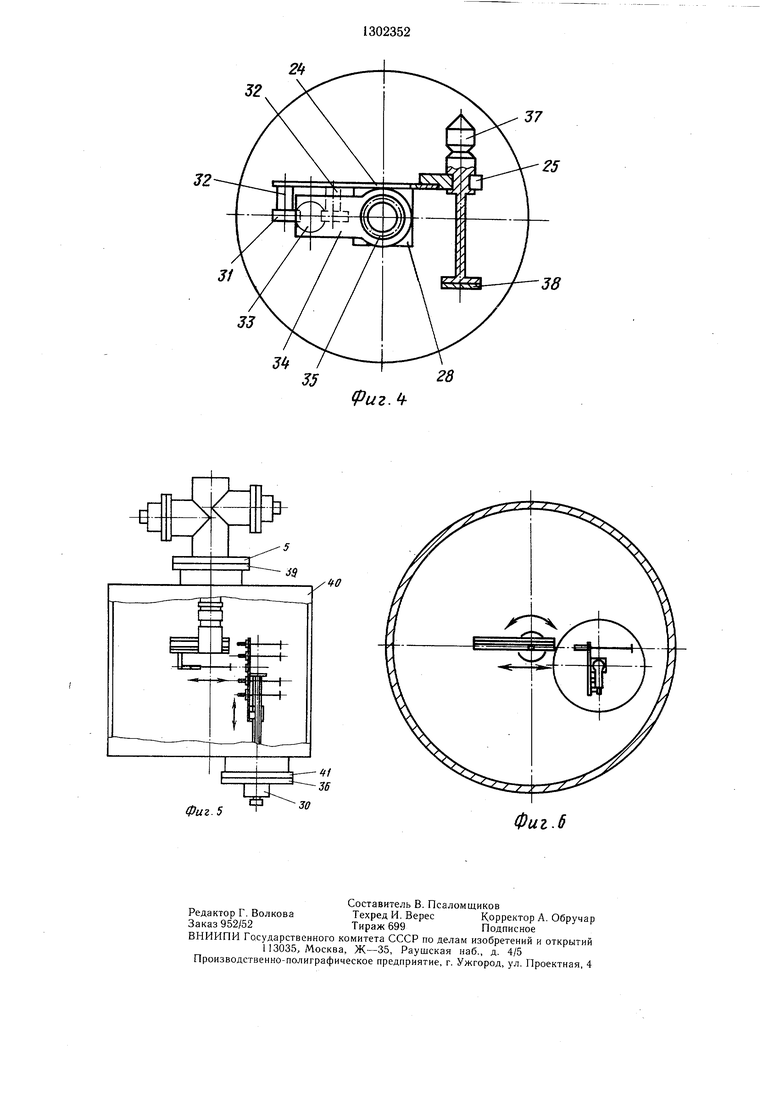
На фиг.2 изображено взаимное расположение каретки 17 с захватом 20, головки 9 с направляющими 10 и 23, шестерней 15 и рейкой 16. Шестерня 15 закреплена на нижнем конце центральной трубы 1 и находится в зацеплении с зубчатой рейкой 16, закрепленной на каретке 17. Направляющие 10 входят в вертикальные пазы каретки 171 а направляющие 23 входят в горизонтальные пазы каретки 17, препятствуя перекосам последней и регулируя степень зацепления шестерни 15 и зубчатой рейки 16. Кассета (фиг.З) выполнена в виде кронштейна 24 с гнездами 25, шариками 26, пружинами 27. Через винтовую пару гайка 28 - винт 29 кассета связана с третьим вводом 30 вращения и через направляющие шарикоподшипники 31 с осями 32 связана с направляющим стержнем 33. Последний через пластину 34 и шарикоподшипник 35 связан с винтом 29. Третий вакуумный ввод 30 вращения и направляющий стержень 33 закреплены на второ.м вакуумном фланце 36.
В гнезде 25 вставлены держатели 37 образцов с образцами 38.
На фиг.5 изображено взаимное расположение манипулятора и кассеты со сменными образцами и вакуумной камере. Манипулятор первым вакуумным фланцем 5 закреплен на верхнем фланце 39 вакуумной камеры 40 в ее центре. Кассета вторым вакуумным фланцем 36 закреплена на нижнем фланце 41 вакуумной камеры 40 так, чтобы ось держателя 37 образца проходила через вертикальную ось вакуумной камеры 40 и на расстоянии от центра кайеры 40 большем, чем минимальный выезд захвата 20 держателя образца от этого центра.
Манипулятор работает следующим обра
зом.
Вращение второго ввода 8 вращения преобразуется посредством второй конической зубчатой передачи из колес 13 и 14 во вращательное движение центральной трубы
0 1. которое в свою очередь преобразуется посредством реечно-зубчатой передачи (15, 16) в возвратно-поступательное перемещение каретки 17 в горизонтальной плоскости по направляющим 10 и 23. Вращение первого ввода 7 вращения преобразуется первой ко5 нической зубчатой передачей (II -12) во вращательное движение средней трубы 2 с закрепленной на ней головкой 9 с направляющими 10 и 23, а следовательно, во вращательное движение каретки 17 с захватом 20 в горизонтальной плоскости на 360°. Сле0 довательно, вращение первого ввода 7 вращения и второго ввода 8 вращения обеспечивает возвратно-поступательное перемещение исследуемого образца 38 в горизонтальной плоскости на расстоянии порядка длины зубчатой рейки 16 и поворот образ5 ца на 360°.
Процесс взятия требуемого образца из кассеты или возврат -его обратно происходит следующим образом. Вращают третий ввод 30 врапления, при этом вращается винт
р 29, связанный с осью ввода 30 вращения. На винт 29 одета гайка 28, связанная с кронштейном 24, который своими направляющими шарикоподшипниками 31 связан с направляющим стержнем 33, препятствующим повороту кронштейна с гайкой 28 вместе с
5 вращающимся винтом 29 и обеспечивающим возвратно-поступательное перемещение гайки 28 и кронштейна 24 вдоль винта 29, расположенного вертикально.
Таким образом, поднимают в плоскость вращения захвата 20 кронштейн 24 с гнез0 дом 25, в который вставлен необходимый образец 38. При этом подпружиненный шарик 26 препятствует выпаданию образца 38 из гнезда 25. Далее, вращением вводов 7 и 8 совмещают ось захвата 20 с осью держателя 37 образца. Вращением второго ввода 8 вращения наезжают захватом 20 на наконечник держателя 37 образца, при этом подпружиненный шарик 21 попадает в
5
треугольную проточку наконечника держателя 37 образца и фикснрует его. Вращая второй ввод вращения 8 поворотом в сторону, выводят держатель 37 образца с образцом 38 из гнезда 25. Кронщтейн 24 опускается ниже плоскости вращения захвата 20. После этого производят с образцом 38 все требуемые операции. При необходимости сменить образец 38 на другой повторяют описанную выще операцию в обратном порядке, потом поднимают в плоскость вращения захвата 20 требуемый образец 38 и повторяют эту операцию сначала. Таким образом подают образец 38 в плоскости вращения захвата 20 в любую точку вакуумной камеры и производят смену исследуемых образцов 38 в вакууме.
Формула изобретения
. Вакуумный манипулятор, содержащий корпус, соединенный через фланец с вакуумной камерой, коаксиально расположенные и установленные в блоках шарикоподшипников внешнюю трубу, жестко соединенную с фланцем, среднюю трубу, один конец которой соединен через коническую зубчатую передачу с первым вакуумным вводом, на втором конце которой закреплена поворотная головка, и центральную трубу, соединенную со вторым вакуумным вводом, отличающийся тем, что, с целью повыщения производительности, дополнительно введены вторая коническая зубчатая передача, связывающая центральную трубу с горизонтально расположенным вторым вакуумным вводом и кассета с держателями образцов, а пово- ротная головка снабжена направляющими, на которых расположена каретка с захватом держателя образца, реечно-зубчатой передачей, выполненной в виде закрепленной на каретке зубчатой рейки и закрепленного на центральной трубе зубчатого колеса.
0
2. Вакуумный манипулятор по п. 1, отличающийся тем, что кассета с держателями образцов выполнена в виде кронштейна с гнездами и установлена с возможностью вертикального перемещения вдоль введенного направляющего стержня за счет винтовой пары, связанной с введенным третьим вакуумным вводом, расположенным совместно с направляющим стержнем на введенном втором фланце.
J 35 2
30
Фиг.З
2
зг
J/
JJ
J«
35
(ригЛ
J7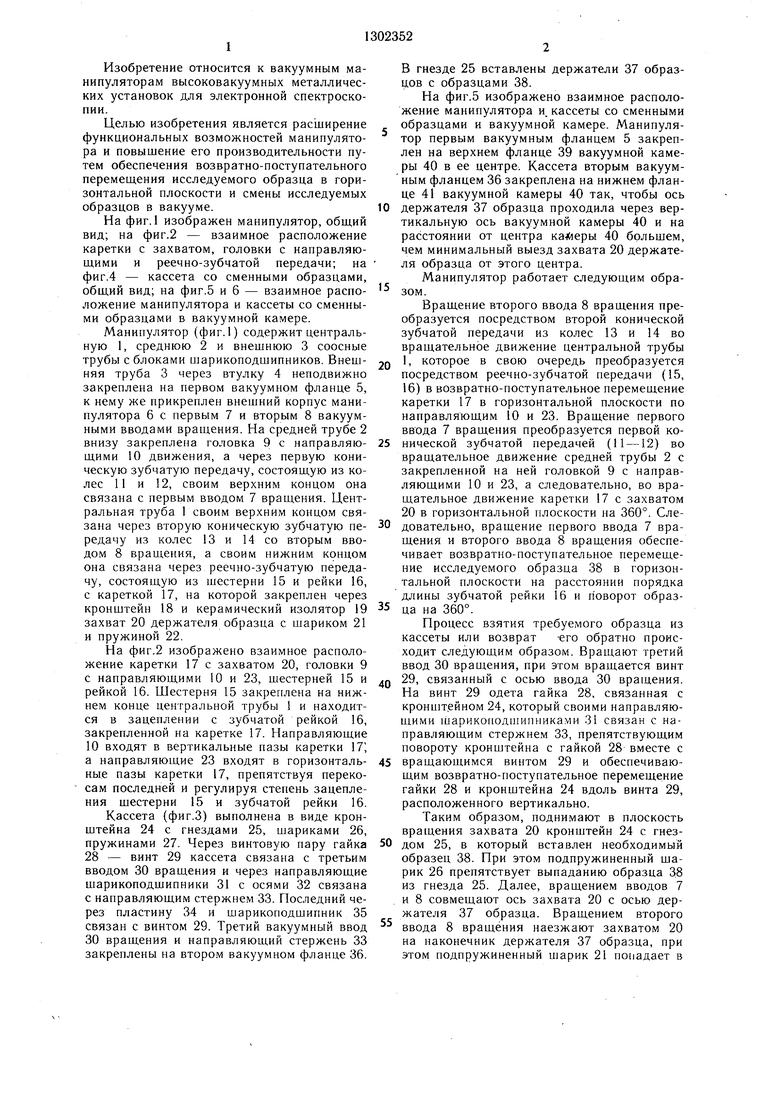
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 1989 |
|
SU1661868A1 |
| Вакуумный манипулятор | 1989 |
|
SU1705913A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Устройство для групповой сборки и пайки монолитных керамических конденсаторов | 1988 |
|
SU1599912A1 |
| Устройство для захвата и подачи плоских изделий | 1986 |
|
SU1375548A1 |
| Устройство для подачи бортовых крыльев к барабану для сборки покрышек пневматических шин | 1979 |
|
SU845345A1 |
| Вакуумный перегрузчик | 1986 |
|
SU1321980A1 |
| Токарный станок для одновременной обработки концов труб и валов | 1990 |
|
SU1798038A1 |
| Устройство для вырубки изделий из резины | 1977 |
|
SU994286A2 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
Изобретение относится к электронной спектроскопии. Цель - повышение производительности вакуумного манипулятора (ВМ). ВМ содержит центральную 1, среднюю 2 и внешнюю 3 соосные трубы (Т) с блоками шарикоподшипников, вакуумные вводы 7 и 8 вращения, поворотную головку 9, коническую зубчатую передачу (КЗП) из колес 11 и 12. Цель достигается тем, что в ВМ введены КЗП из колес 13 и 14, связывающая центральную Т 1 с вакуумным вводом 8, и кассета с держателями образцов, выполненная в виде кронщтейна с гнездами, связанная через винтовую пару гайка-винт с вводом вращения, а поворотная головка 9 имеет направляющие 10, на которых закреплена каретка 17 с захватом 20 держателя образца, связанная через реечно-зубчатую передачу из шестерни 15 и рейки 16 с вакуумным вводом 8 вращения. 1 з.п.ф-лы. 6 ил. i (О О5 О tc со ел Ю п
/«
Фиг.5
30
Фиг.6
| Journal of applied physics, v | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
| СВЕТОВОЙ РЕКЛАМНЫЙ АППАРАТ | 1925 |
|
SU3517A1 |
| Surface science, v | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| Рельсовое стыковое скрепление | 1922 |
|
SU461A1 |
| Roview scientific instruments, v | |||
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
| Счетная бухгалтерская линейка | 1922 |
|
SU386A1 |
