Изобретение относится к автоматизации загрузки технологических машин и может быть использовано для загрузки гибких производственных модулей, например, штамповых.
Цель изобретения - упрощение конструкции и повышение надежности выдачи треугольных заготовок, имеющих кривизну.
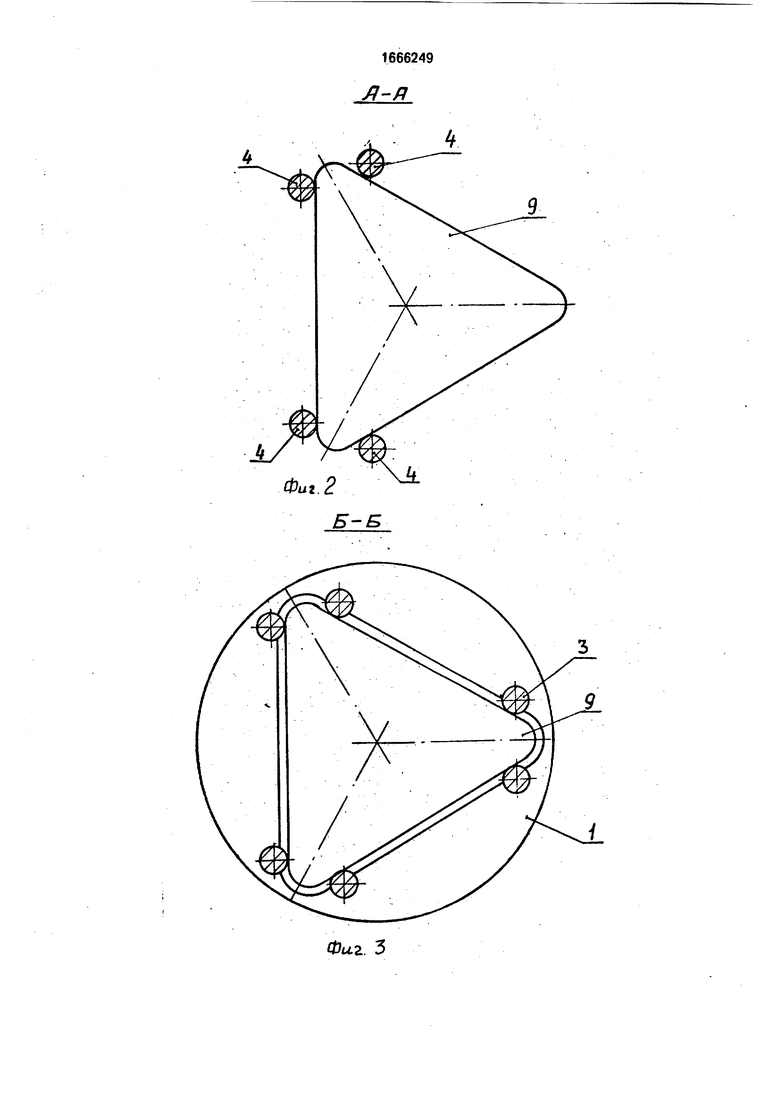
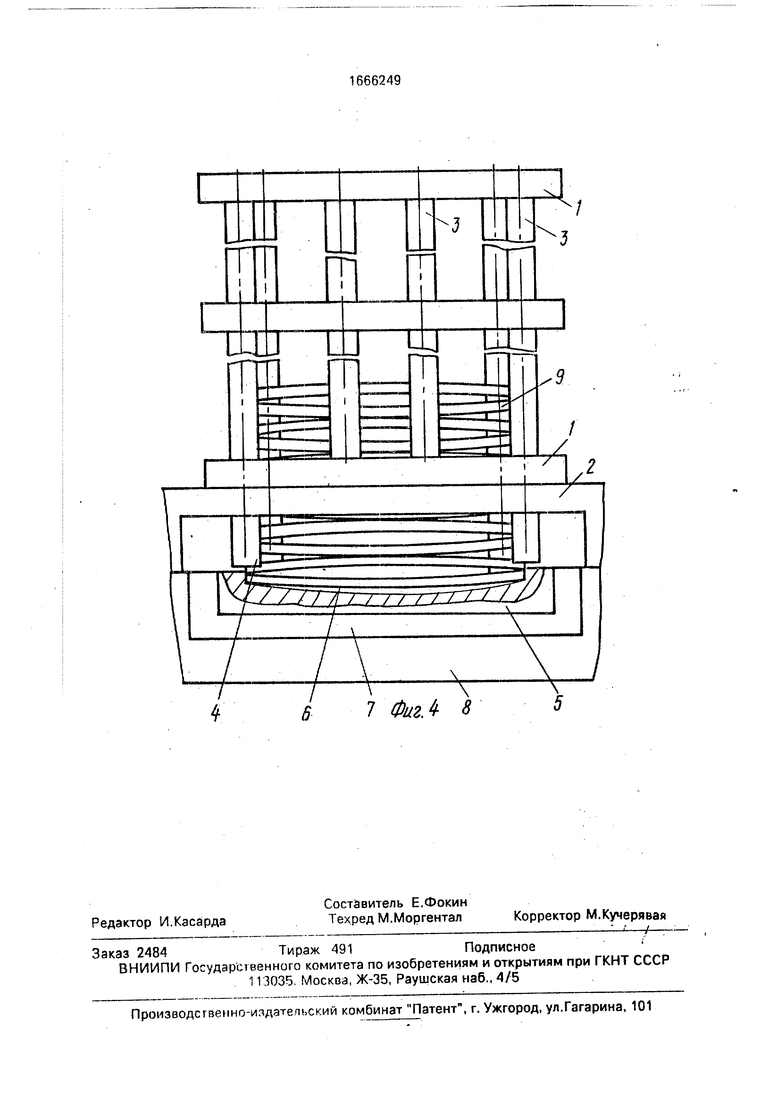
На фиг. 1 представлено устройство, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - устройство, вид спереди.
Устройство состоит из колец 1, основания магазина 2, прутков 3, упоров 4, шибера б с выборкой 6, (подвижной платформы 7 и основания 8 платформы
Устройство работает следующим образом.
В исходном состоянии шибер 5, выполненный в виде вкладыша, находится под окном выдачи (не показано) в основании магазина 2 таким образом, что заготовка 9 свободно падает в выборку 6. Если заготовка 9 имеет высоту прогиба, как показано на фиг. 1, то выборка 6 несколько большей глубины способствует занятию заготовкой 9 такого положения, что ее края не выступают из выборки 6, поскольку глубина выборки по периметру равна толщине заготовки 9. Сверху на заготовку 9 ложится следующая в стопе заготовка 9, В зависимости от имею- щейся кривизны заготовок 9 и случайного их расположения в стопе при наполнении магазина заготовки 9 могут принимать различное положение. На фиг. 1 показан случай, когда заготовки 9 соприкасаются друг с другом по контуру в местах возможного расположения заусенцев.
При движении платформы 7 слева направо по основанию 8 платформы (привод платформы не показан) выборка 6 шибера 5
свободно без заклинивания транспортирует заготовку 9 на позицию выдачи (не показана), Тело вкладыша шибера 5 и платформы 7 в этом случае выполняет роль отсекателя
для предпоследней заготовки 9 стопы.
Свободный выход заготовки 9 на позицию выдачи обеспечивается торможением предпоследней заготовки в стопе упорэми 4. На фиг. 2 и 4 видно, как происходит это торможение при возвратно-поступательном движении шибера 5.
После того, как заготовка 9 на позиции выдачи забирается из выборки 6, например, с помощью схвата робота,подается команда
на возврат шибера 5 в исходное состояние, и платформа 7 делает движение справа налево. В момент возврата платформы 7 новая заготовка 9 падает в выборку 6 и устройство готово для следующего цикла работы.
Формула изобретения
Устройство для отделения имеющих кривизну плоских треугольных заготовок с нижней части стопы, содержащее установленные на основании магазин, средство выдачи заготовок и отсекатели, отличающееся тем, что, с целью упрощения конструкции и повышения надежности выдачи треугольных заготовок, имеющих кривизну, магазин выполнен из прутков, причем прутки расположены попарно у вершин углов заготовок, средство выдачи заготовок выполнено в виде шибера, содержащего выборку в виде треугольника,
ориентированного одной из вершин в направлении выдачи заготовок, кроме того, продолжения прутков магазина являются отсекателями и расположены у вершин углов при основании треугольной выборки
шибера, противоположного направлению выдачи заготовок.
л-я
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Загрузочное устройство | 1985 |
|
SU1313639A1 |
| Устройство для отделения плоских заготовок от стопы | 1987 |
|
SU1461568A1 |
| Устройство для накопления и поштучной выдачи заготовок | 1983 |
|
SU1184590A1 |
| Устройство для поштучного отделения плоских заготовок из стопы и подачи их в рабочую зону | 1985 |
|
SU1311820A1 |
| Устройство для отделения заготовки от стопы и подачи ее в зону обработки | 1982 |
|
SU1123780A1 |
| Устройство для отделения плоских заготовок с нижней части стопы | 1980 |
|
SU927698A1 |
| Устройство для поштучной выдачи листовых заготовок | 1990 |
|
SU1776479A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1990 |
|
RU2005587C1 |
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
Изобретение относится к технике автоматизации загрузки технологических машин и может быть использовано для загрузки гибких производственных модулей, например штамповых. Цель изобретения - упрощение конструкции и повышение надежности выдачи треугольных заготовок, имеющих кривизну. Устройство содержит кольца 1, магазин 2, прутки 3, упоры 4, шибер 5 с выборкой 6, подвижную платформу 7. Устройство работает следующим образом. В исходном состоянии шибер 5, выполненный в виде вкладыша, находится под окном выдачи в основании магазина 2 таким образом, что заготовка 9 свободно падает в выборку 6. Если заготовка 9 имеет высоту прогиба, как показано на фиг. 1, то выборка 6 несколько большей глубины способствует занятию заготовкой 9 такого положения, что ее края не выступают из выборки 6, поскольку глубина выборки по периметру равна толщине заготовки 9. Сверху на заготовку 9 ложится следующая заготовка 9. При движении платформы 7 слева направо по основанию платформы выборка 6 шибера 5 свободно транспортирует заготовку 9 на позицию выдачи. Шибер 5 и платформа 7 являются отсекателями для предпоследней заготовки 9 стопы. Свободный выход заготовки 9 на позицию выдачи обеспечивается торможением последней заготовки в стопе упорами 4. После того как заготовка 9 на позиции выдачи забирается из выборки 6 шибера 5 схватом робота, платформа 7 с шибером 5 возвращается в исходное положение. В момент возврата новая заготовка 9 падает в выборку 6, и устройство готово для следующего цикла работы. 4 ил.
Фиг 2
Б-В
Фиг. 3
б 7 Фиг. 4- 8
5
| Устройство для поштучной выдачи заготовок из стопы | 1984 |
|
SU1217535A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
