Изобретение относится к технологическому оборудованию электронной техники, а именно к устройству демонтажа гибкого носителя от рамки-спутника и удаления с него бракованных полупроводниковых кристаллов.
Целью изобретения является автоматизация демонтажа гибкого носителя от рамки-спутника и повышение надежности работы устройства.
На фиг. 1 приведено устройство демонтажа гибкого носителя от рамки-спутника и удаления с него полупроводниковых кристаллов; на фиг. 2 - механизм отрыва гибкого носителя от рамки-спутника; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - механизм захвата гибкого носителя; на фиг. 5 - механизм отрыва бракованных кристаллов с гибкого носителя; на фиг. 6 - разрез Б-Б на фиг. 1.
Устройство содержит основание 1 (фиг. 1), механизм 2 подачи и механизм 3 приема рамки-спутника 4 с кассетой 5, несущую плиту 6 с пневмодорожкой 7, окном 8, соплом 9 и упором 10, расположенную на стойках 11, установленных на основании 1, механизм 12 отрыва гибкого носителя 13 от рамки-спутника 4, расположенный над окном 8 несущей плиты 6, механизм 14 захвата гибкого носителя 13 с направляющими 15 и 16 гибкого носителя 13 и механизм 17 отрыва кристаллов 18, расположенные под окном 8 несущей плиты 6, емкость 19 для
сбора кристаллов 18 и емкость 20 для сбора гибкого носителя 13.
Механизм 12 отрыва гибкого носителя 13 (фиг. 2) от рамки-спутника 4 содержит
привод 21, например пневмоцилиндр, подпружиненную траверсу 22,установленную с возможностью возвратно-поступательного перемещения по вертикальным направляющим 23, закрепленных на несущей плите 6,
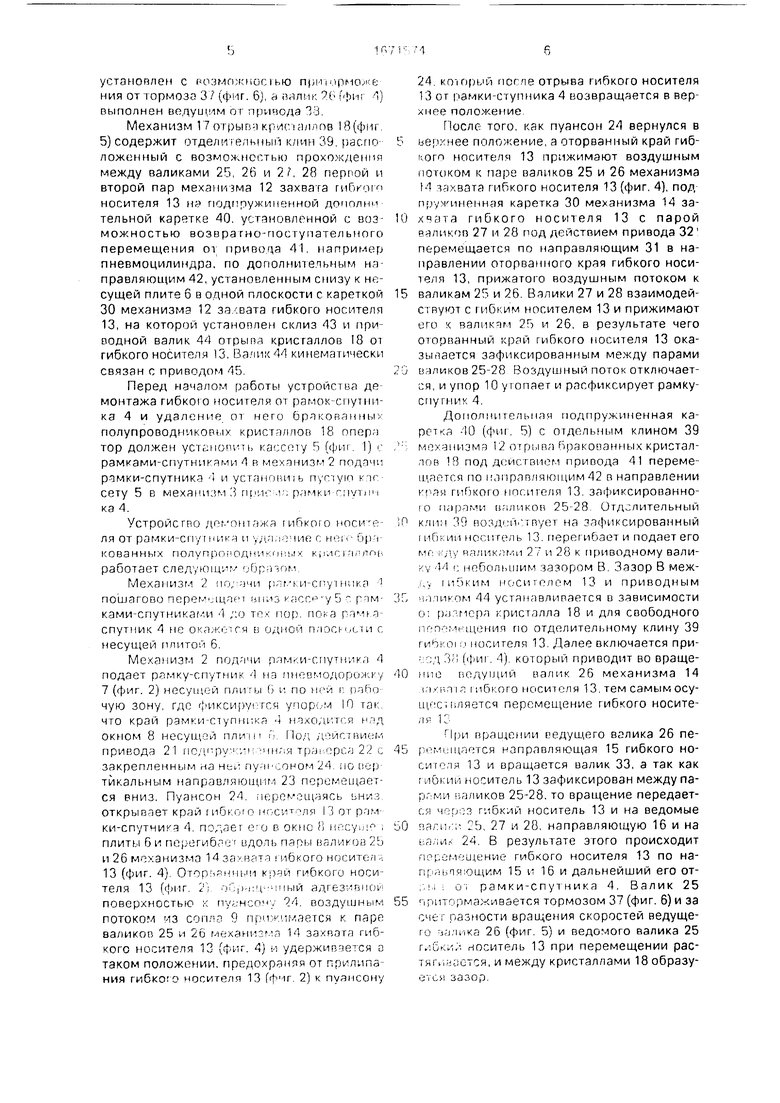
пуансон 24, закрепленный на траверсе 22 и проходящей сквозь окно 8 несущей плиты 6, Пуансон 24 выполнен в виде сегмента (фиг. 3).
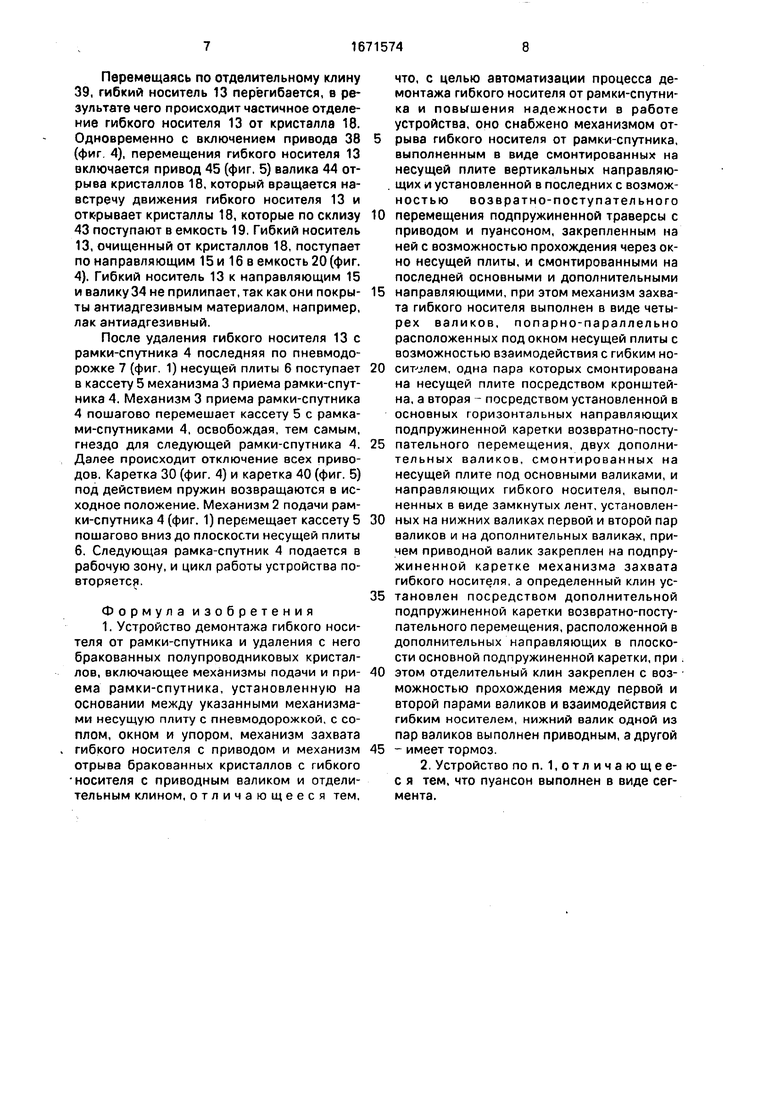
Механизм 14 захвата гибкого носителя
13 (фиг. 4) содержит четыре попарно-параллельных валика 25, 26 и 27, 28, расположенных под окном 8 несущей плиты 6 с возможностью взаимодействия с оторванным гибким носителем 13. Одна пара валиков 25 и 26 установлена на кронштейне 29, закрепленном к несущей плите 6, а вторая пара валиков 27 и 28 - на подпружиненной каретке 30, установленной с возможностью возвратно-поступательного перемещения
по основным горизонтальным направляющим 31 от привода 32, например пневмоци- линдра. Направляющие 15 и 16 гибкого носителя 13 выполнены в виде замкнутых лент, установленных на нижних валиках 26
и 28 первой и второй пары и двух дополнительных валиках 33 и 34, расположенных под ними на кронштейнах 35 и 36. Валик 25
угтановлен с i OJMO t ьипью npm UIMO f
НИЯ ОТ ТОрМОЗ 3 / (фИГ 6) d | г)Лт 9( })И 1
выполнен ведущим or привода 3d
Механизм 17 офыв i к| /г ыл пв 18(фш 5) содержит птделигр 1ьнын мши 39 ьаспп ложенный с возмоч ногтью прохождения между валиками 25 2Ь и 1 1 28 пергой и второй пар механизма 12 захвата гибкою носителя 13 Mr подппужин нной дпгюлни тельной каретке 40 установленной с воз можностью возвратно поступательного перемещения от привода 41 например пневмоцилиндра по дополнительным н ) правляющим 42 установленным снизу к не сущей плите 6 в одной плоскости с кареткой 30 механизма 12 зо вата гибкого носителя 13 на которой установлен склиз 43 и при водной валик 44 отрыва кристаллов 18 от гибкого носитетя 13 Ваши 44 кинематически связан с приводом 45
Перед началом работы устройства ДР монтажа гибкою носителя от рамок спутми ка 4 и удаление от нет овчины полупроводниковых кристаллов 18 опер) тор должен устелют п л гч/ ci (фш 1) рамками спутниками 4 р механизм 2 подач
рОМКИ-СПуТНИК t И yLT НО 11 Ь П,С yin h К
сету 5 в мехами м 3 nt i i р IMKH r WTI ка 4
Устройство эл-а гибкое носи ля от рамки en, i iu а и ,, uif с н i hp t кованных полчпрг одн i к( iri i rni работает след,ющ л Ь, j-jr м
Механизм 2 ir i ni р гьисгутн ка пошагово перрм щ if i i nj и ками спутниками 1 , n тп пор пег а т/п n спутник 4 HP о т н сч EJ одном п loci i ти с несущей плито 1 6
Механизм 2 под i и п IM и ( пул /к i 4 подает рамку спутник 1 m пн вмодороt / 7 (фиг 2) necyti f и пли ы f i по н s i t iho чую зону где (|иксИ|Г/1 гсч /пор м 10 тo что край рамп и ступш а ч н°ход1. т я н п окном 8 несущей плии По риг i ни i привода 21 но i pv -I IH iTpj PL 2) закрепленным на пун оном 24 тйкальным направ яющ| г- 2J перемещает ся вниз Пуансон 24 iffr-f ьн/3
ОТКрЫВТеТ Г Иби С О ИГ с ЛП I 5 ОТ р 14
ки-спутчи ч 4 тет сое окне Ь i j плитн б и по, згиб идоть пагч i вз/i IKOH / j и 26 м04-анизма 14 а в тт пбюго носите i 13 (фиг 4) Отоо -MI tni к ) in гибкого ноги теля 13 (Ьиг )i i ыи эд1ез п 01
поверхностью п н оч 94 воздушны потоком из сон1 1 с ni и i /ТРТСЯ к паре валиков 25 и 2о гнханг 14 за/пата (иЬ кого носителя 12 (-fvr 4; удержип te ся а таком положении предохраняя от грилипа ния гибко О носите 1Я 13 (фиг 2) v nvanconv
24 KOiopu i посте отрыва гибкого носителя 13 о г рамки с туп пика 4 со i вращаете я в вер /нее положение
После того как пуансон 24 вернулся в
не нее поло i ение а оторванным край гиб ото носителя 13 прижимают воздушным потоком к паре валиков 25 и 26 механизма I i т гибкого носителя 13 (фиг 4) под прочтенная каретка 30 механизма 14 за
0 хчг1та гибкого носителя 13 с парой РЧЛИЬ п 27 и 28 под действием привода 32 перемещается по направляющим 31 в на правлении оторванного края гибкого носителя 13 прижатою воздушным потоком к
5 валикам 2q и 26 Валики 27 и 28 взаимодей С1вуют с гиб им носителем 13 и прижимают его валиктм 2 и 26 в результате чего оторванный рай гибкого носителя 13 ока зыпается зафиксированным между парами
j в 1ЛИК08 25 28 Воздушный поток отключает я и упор 10 гопает и расфиксирует рамку спугни 4
Донолчите 1ыпя подпружиненная ка рстка 10 (фиг Ч с отдельным клином 39 механизма 12огр in i Ьпакооанныч кристал юв под зсисгвием привода 41 переме ищется по i1 тправляющим 42 в направлении м ч1 гибкого носителя 13 зафиксированно го п фтч- и ликоп 2528 Отд лительныи П кчи i T9 во vV ч П/ет на зафиксированный гиб ии но п теть 13 пррегиР ает и подает его MI н ч т1- г и 2 и 28 к приводному вали , 11 црбол( UIUM ззяором В Зазор В меж , т пим нссптелем 13 и приводным
т 1июм 44 устам твлипается в зависимости
с pj мера г рисплла 18 и для свободного
i f и-щения по отделительному клину 39
rub d июсителя 13 Далее включается при
i ( |и 1j который приводит во враще0 нио г)г ду|лии валик 26 механизма 14 ii«iii i 1610 го но сит Р ля 13 темсамым осу- щ( с.i ляется перемещение гибкого носите n i
При вращении ведущего валика 26 пеЬ ft нигчся направляющая 15 гибкого но- 13 и вращается валик 33 а так как г mi ии носитель 13 зафиксирован между па- п N т зликов 25 28 то вращение передает- r i ч о ч г/бкии носитель 13 и на ведомые
О па и 2S 27 и 28 направляющую 16 и на
и- В результате этого происходит
м имение гибкого носителя 13 по нап i пч ощим 15 г 16 и дальнейший его отL. рамки спутника 4 Валик 25
5 ц итг ,1ма ивается тормозом 37 (фиг 6) и за сие казности вращения скоростей ведущего Jin кр 26 (фиг 5) и ведомого валика 25 г. и-ь носитель 13 при перемещении рас- тяг отся и между кристаллами 18 образу- о us
Перемещаясь по отделительному клину 39, гибкий носитель 13 перегибается, в результате чего происходит частичное отделение гибкого носителя 13 от кристалла 18. Одновременно с включением привода 38 (фиг. 4), перемещения гибкого носителя 13 включается привод 45 (фиг, 5) валика 44 отрыва кристаллов 18, который вращается навстречу движения гибкого носителя 13 и открывает кристаллы 18, которые по склизу 43 поступают в емкость 19, Гибкий носитель 13, очищенный от кристаллов 18, поступает по направляющим 15 и 16 в емкость 20 (фиг. 4). Гибкий носитель 13 к направляющим 15 и валику34 не прилипает,так какони покрыты антиадгезивным материалом, например, лак энтиадгезивный.
После удаления гибкого носителя 13 с рамки-спутника 4 последняя по пневмодо- рожке 7 (фиг. 1) несущей плиты 6 поступает в кассету 5 механизма 3 приема рамки-спутника 4. Механизм 3 приема рамки-спутника 4 пошагово перемешает кассету 5 с рамками-спутниками 4, освобождая, тем самым, гнездо для следующей рамки-спутника 4. Далее происходит отключение всех приводов. Каретка 30 (фиг. 4) и каретка 40 (фиг. 5) под действием пружин возвращаются в исходное положение. Механизм 2 подачи рамки-спутника 4 (фиг. 1) перемещает кассету 5 пошагово вниз до плоскости несущей плиты 6. Следующая рамка-спутник 4 подается в рабочую зону, и цикл работы устройства повторяется.
Формула изобретения 1. Устройство демонтажа гибкого носителя от рамки-спутника и удаления с него бракованных полупроводниковых кристаллов, включающее механизмы подачи и приема рамки-спутника, установленную на основании между указанными механизмами несущую плиту с пневмодорожкой, с со- плом, окном и упором, механизм захвата гибкого носителя с приводом и механизм отрыва бракованных кристаллов с гибкого носителя с приводным валиком и отделительным клином, отличающееся тем,
что, с целью автоматизации процесса демонтажа гибкого носителя от рамки-спутника и повышения надежности в работе устройства, оно снабжено механизмом отрыва гибкого носителя от рамки-спутника,
выполненным в виде смонтированных на
несущей плите вертикальных направляю. щих и установленной в последних с возможностью возвратно-поступательного
перемещения подпружиненной траверсы с приводом и пуансоном, закрепленным на ней с возможностью прохождения через окно несущей плиты, и смонтированными на последней основными и дополнительными
направляющими, при этом механизм захвата гибкого носителя выполнен в виде четырех валиков, попарно-параллельно расположенных подокном несущей плиты с возможностью взаимодействия с гибким носитулем, одна пара которых смонтирована на несущей плите посредством кронштейна, а вторая - посредством установленной в основных горизонтальных направляющих подпружиненной каретки возвратно-постунательного перемещения, двух дополнительных валиков, смонтированных на несущей плите под основными валиками, и направляющих гибкого носителя, выполненных в виде замкнутых лент, установленных на нижних валиках первой и второй пар валиков и на дополнительных валика, причем приводной валик закреплен на подпружиненной каретке механизма захвата гибкого носителя, а определенный клин установлен посредством дополнительной подпружиненной каретки возвратно-поступательного перемещения, расположенной в дополнительных направляющих в плоскости основной подпружиненной каретки, при ,
этом отделительный клин закреплен с возможностью прохождения между первой и второй парами валиков и взаимодействия с гибким носителем, нижний валик одной из пар валиков выполнен приводным, а другой
- имеет тормоз.
2, Устройство по п. 1,отличающее- с я тем, что пуансон выполнен в виде сегмента.
rr
r-
ID
r
co
4s . -a-.
41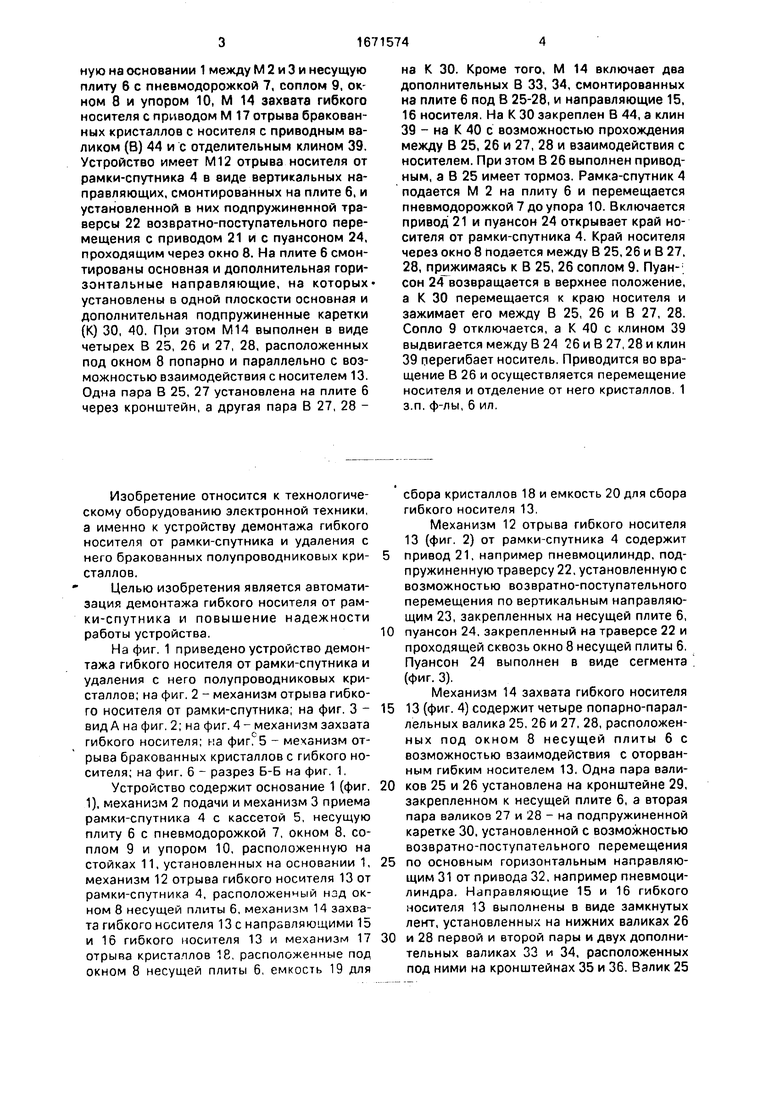
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для подготовки радиоэлементов к монтажу | 1985 |
|
SU1314489A1 |
| Устройство для штамповки деталей из листового материала В.И.Васильева | 1989 |
|
SU1660805A1 |
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Автомат сортировки и укладки кристаллов по группам | 1975 |
|
SU560653A1 |
| УСТРОЙСТВО для ПРОБИВКИ оконв | 1969 |
|
SU241382A1 |
| Автомат для изготовления изделий из проволоки несколькими гибочными инструментами, смонтированными на неподвижной каретке и ползуне с кривошипным приводом, с механизмом подачи проволоки в виде подпружиненной каретки с клиновым зажимом | 1949 |
|
SU148376A1 |
| Полуавтоматическая сборочная линия | 1982 |
|
SU1115886A1 |
| Устройство для вырубки и сборкидЕТАлЕй | 1979 |
|
SU837485A1 |
| Устройство для сборки растровой информационной кассеты | 1972 |
|
SU455310A1 |
| Устройство для формирования картонных пачек | 1988 |
|
SU1622226A1 |

Изобретение относится к электронной технике и позволяет автоматизировать демонтаж гибкого носителя от рамки-спутника и повысить надежность работы устройства. Устройство включает механизм /М/ 2 подачи и М 3 приема рамки-спутника 4, установленную на основании 1 между М 2 и 3 несущую плиту 6 с пневмодорожкой 7, с соплом 9, с окном 8 и с упором 10, М 14 захвата гибкого носителя 13 с приводом к М 17 отрыва бракованных кристаллов с носителя с приводным валиком /В/ 44 и с отделительным клином 39. Устройство имеет М 12 отрыва носителя от рамки-спутника 4 в виде вертикальных направляющих, смонтированных на плите 6, и установленной в них подпружиненной траверсы 22 возвратно-поступательного перемещения с приводом 21 и с пуансоном 24, проходящим через окно 8. На плите 6 смонтированы основная и дополнительная горизонтальные направляющие, на которых установлены в одной плоскости основная и дополнительная подпружиненные каретки /К/ 30, 40. При этом М 14 выполнен в виде четырех В 25, 26 и 27, 28, расположенных под окном 8 попарно и параллельно с возможностью взаимодействия с носителем 13. Одна пара В 25, 27 установлена на плите 6 через кронштейн, а другая пара В 27, 28 - на К 30. Кроме того, М 14 включает два дополнительных В 33, 34, смонтированных на плите 6 под В 25 - 28, и направляющие 15, 16 носителя. На К 30 закреплен В 44, а клин 39 - на К 40 с возможностью прохождения между В 25 и 26 и 27 и 28 и взаимодействия с носителем. При этом В 26 выполнен приводным, а В 25 имеет тормоз. Рамка-спутник 4 подается М 2 на плиту 6 и перемещается пневмодорожкой 7 до упора 10. Включается привод 21 и пуансон 24 отрывает край носителя от рамки-спутника 4. Край носителя через окно 8 подается между В 25, 26 и В 27, 28 прижимаясь к В 25, 26 соплом 9. Пуансон 24 возвращается в верхнее положение, а К 30 перемещается к краю носителя 13 и зажимает его между В 25, 26 и В 27, 28. Сопло 9 отключается, а К 40 с клином 39 выдвигается между В 24, 26 и В 27, 28 и клин 39 перегибает носитель. Приводится во вращение В 26 и осуществляется перемещение носителя и отделение от него кристаллов. 1 з.п. ф-лы, 6 ил.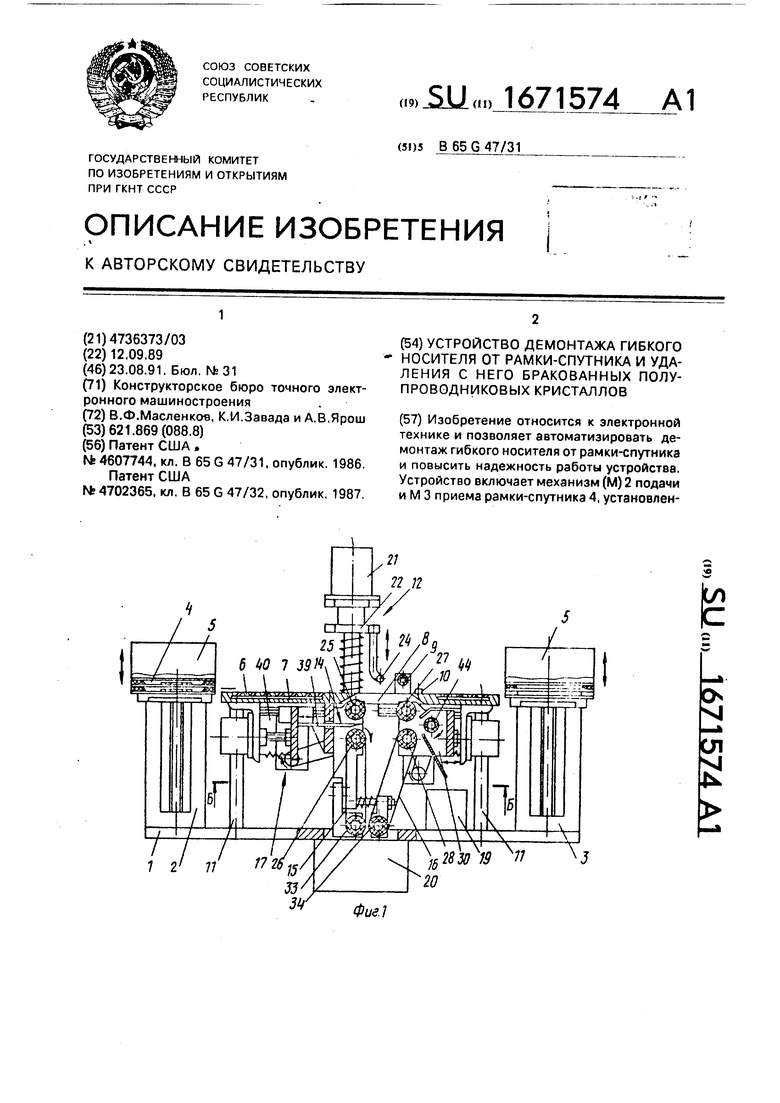
М
| Патент США №4607744, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Патент США №4702365, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кузнечная нефтяная печь с форсункой | 1917 |
|
SU1987A1 |
