1
Изобретение относится к области оптической вычислительной техники.
Известны устройства для сборки растровой ииформациониой кассеты, содержащие основание и расположенные иа нем опорную плиту, микроманииулятор с арретиром, илиту-носитель технологический спутник кассеты и измерительиый .микроскоп.
В таких устройствах имеется юстировочная координатная сетка (трафарет), которую необходимо также ориентировать относительно технически.х баз кассеты. Погрешности этого совмещения накладываются «а погрешности совмещения базовых линз .модуля с трафаретом. В результате двойной .погрешности совмещений точ 1ость совмещения .модуля относительно технологических баз информационной кассеты снижается.
Цель изобретения - иовышеиие точности сборки растровой кассеты.
Это достигается тем, что в предлагаемое устройство введена полая цапфа, ось которой совмеп1,епа с оптической осью .микроскопа, с платформой, на которой размещен микроманипулятор, а в плите-носителе выполнены базовые отверстия вдоль направлений перемещения микроскопа.
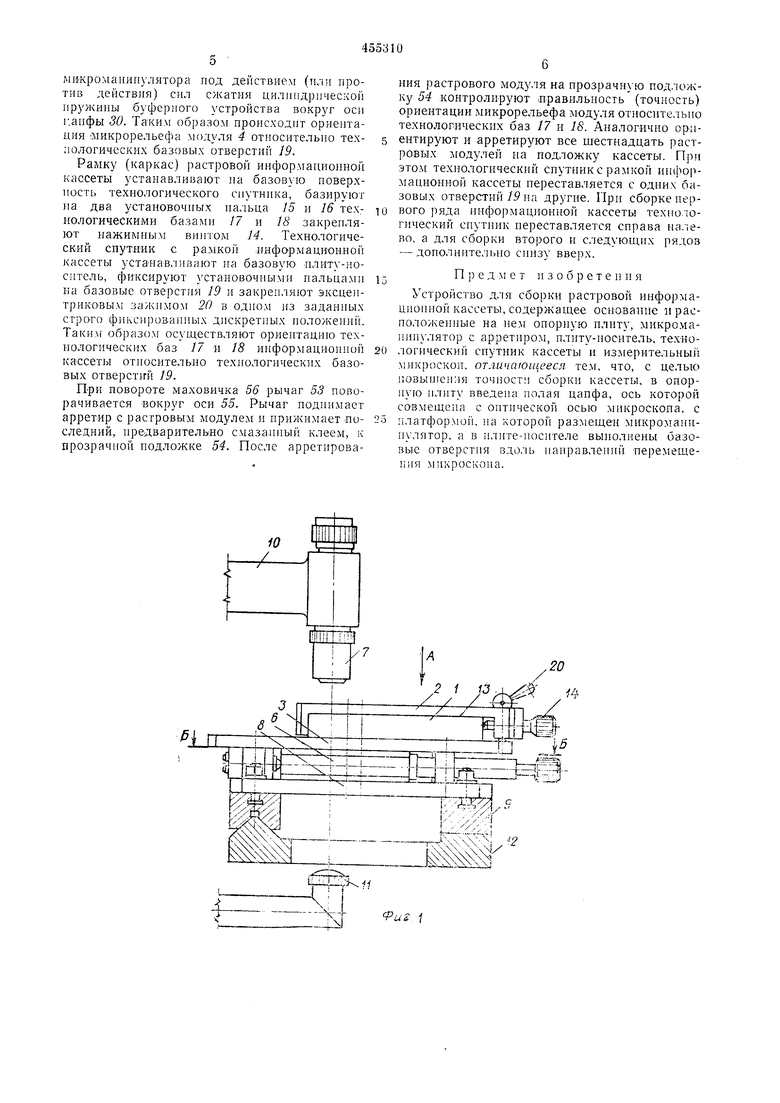
На фиг. 1 показано устройство для сборки растровых инфор.мацпонных кассет, вид сбоку; на фиг. 2 - вид по стрелке А на фиг. 1; на
2
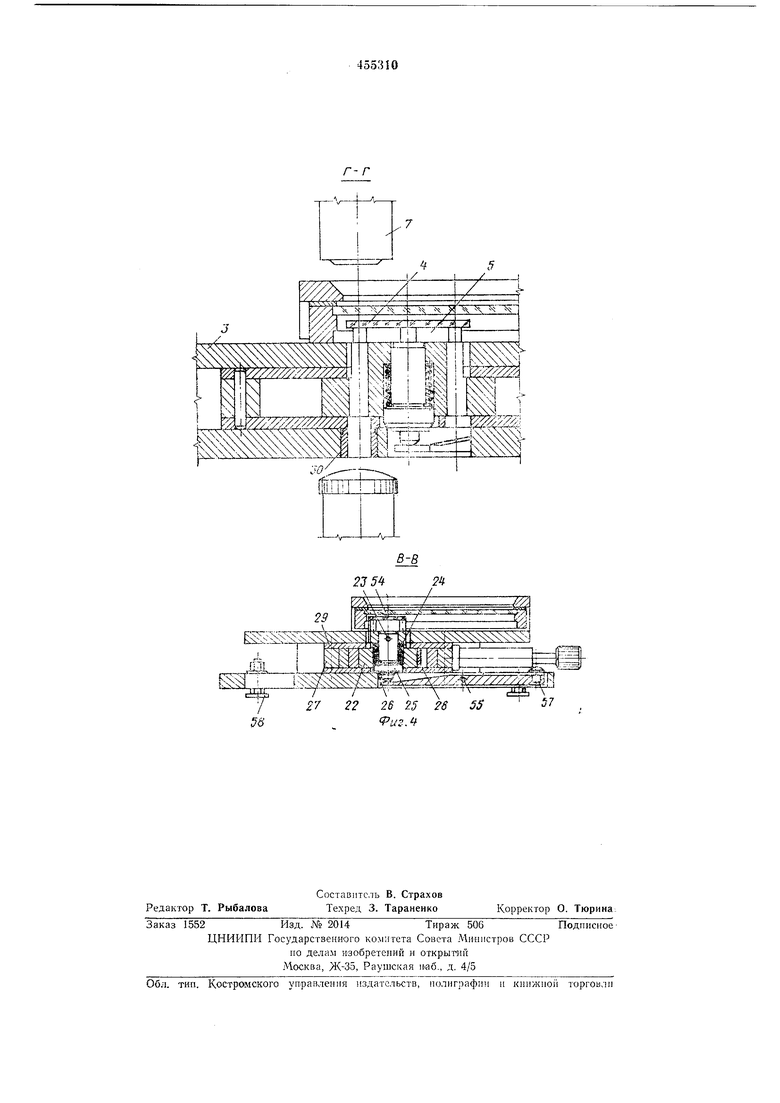
фиг. 3 - разрез по Б - Б на . 1; иа |)иг. 4 - разрезы по б - В м Г-Г на фиг. 2.
Растровая ппфор.мационная каееета / установлена в технологическом спутнике 2. Снутник закренлен в одно строго фикспрован)юм дискретном заданном ноложснин на базовой плите-носителе Л. Растровый модуль 4 (фиг. 4) расположен в арретпре 5 мпкроманппулятора 6. Ось поворота корпуса .микроман пулятора совмещена с оптической осью главного мик0роскопа 7 1 находится в основании 8.
Устройство для сборки информацпо 1ной кассеты установлено на продольной каретке 9 универсального измерительного )Скоиа. Главный микроскон 7 с ноддержнвающей колонкой W и центральное осветительное устройство // расположень на поперечной каретке универсального микроскопа. Продольная каретка и поперечная каретка универсального микроскопа имеют возможность неремеии1ться
0 по направляющим станины /2 .микроскопа в двух взаимно нерпендпкулярных панрав.тениях.
Рамка (каркас) кассеты установлена на базовой поверхности 13 технологического сиутннка и ноджата наж 1мным винтом 1-1 к установочным пальцам 15 и 16 (фиг. 2). Технологическая база 17 кассеты ноджата к установочному пальцу 15. я те.ЧНологическая база 18 - к л-становоч11ом - нальцу 16. стаповочпыс паль0
цы запрессованы в рамку технологического спутника, так что их концы-выступают. Выступающий конец установочного пальца 16 ромбический (срезанный). Технологический снутиик установлен па базовой плите-носителе 3 в одном из ноложений (на фнг. 2 в крайнем нравом нилчнем иоложеиии) с помощью нальцев 15 и 16 на базовые отверстня 19 плиты-носителя 3 и закреплен эксцентричны зажимом 20, эксцентрик которого вставлен в одном из установочных назов 2-} базовой нлиты-носителя 5 (-на фиг. 2 в нижнем назу).
Ра-стровый модуль 4 расположен па торцовой еоверхности арретира 5 (фиг. 4). Арретир но скользящей носадке вставлен в плавающий вкладыш 22 микроманипулятора. Палец 23, заНрессованный в арретир, препятствует повороту последнего относительно нлавающего вкладыша. Арретир Прижат к торцовой поверхности вкладыша пружиной 24. Кольцо 25, застонорепное на нижнем конце арретира стонорной шайбой 26, является ноддерживающей опорой арретира. Плавающий вкладыш находится внутри «орнуса 27 мик-романипулятора между опорной плитой 28 и его «рышкой 29. Онорная плита 28 и крышка 29 закреплены на корпусе 27 микрО|Мапипулятора виптами « штифтами так, -что вкладыш 22 имеет возможность перемещаться внутри микроманинулятора. Вокруг цанфы (оси) 30 онорной нл«ты 28. установленной но скользящей носадке в основании 8, мнкроманипулятор может поворачиваться. Цапфа выполнена за одно целое с опорной плитой 28. Для визуального контроля в арретире 5, вкладыше 22, плите 28, в цанфе 30 и основании 8 сооспо расточены по четыре смотровых отверстия 31-34 (фиг. 3).
Механизм перемещения растрового модуля 4 по оси У У выполиен клино-винтовым. Гайка 35 механизма перемещения изготовлепа путем заливки стирокрила в обойму вместе с микровинтом 36. Гайка 35 центрирующим нoяCкo i вставлена в отверстие корпуса микроманипулятора И закреплена винтами. Клин 37 механизма выполнен с Т-образным пазом, в который вставлен Т-обрааный Конец микровинта Зб. Внутри корпуса микрома«ипулятора установлен ненодвнжный клин 38, служащий опорой нодвижного клина 37. Плавающий вкладыш 22 прижат к клину 37 плоской пружиной 39 (фиг. 3).
Конструкция мехапнзма перемещения растрового модуля но -оси XXi аналогична. Механизм содержит Микровинт 40, гайку 41, подвижный «ЛИН 42, «еподвижпый клнн 43 и нлоскую нружину 44.
Механизм новорота микрОМанипулятора вокруг цапфы 30 выполнен клино-винтовым. Гайка 45, микровинт 46 н соединение микровинта 46 с клином 47 выполнены аналогично соответствующим элементам механизма перемещения. Гайка 45 центрирующим пояском вставлена в отверстие бруска 48 н закреплена винта ми. Клин 47 имеет возможность перемещения вдоль продольного паза в бруске 4S. В
брусок 49 вмонтирован буферный узел. Корнус микроманинулятора поджат толкателем 50 к клипу 47 нятой 51 нод действнем нружины, отрегулированной винтом 52. Бруски 48 и 49
установлены между основанием 8 и базовой
плитой 1осителя 3 так, что микроманипулятор имеет возможность поворота вокруг цапфы вО (фиг. 4). Рычаг 53 механиЗМа арретирования растро„ вого модуля на нрозрачную подложку 54 установлен на оси 55. Маховичок 56 в виде торцового кулачка расположен на -оси. Торцовая поверхность кулачка опирается на няту 57. Пята занрессована с выходноГг конец рычага 53.
- Устройство для сборки информационной кассеты закреплено на продольной каретке 9 универсального мнкроскопа четырьмя Т-образнымн болтами 58 п гайкамн 59.
Устройство работает следующн-М образом. 0 Устройство устанавливают и закрепляют на продольной каретке Т-образными болтами 58 так, чтобы осевые линии базовых отверстий J9 совпадали с главнььми взаимно перпендикулярными направления:.ми координатных пере5 мещеппй универсального .мнкроскопа. Ось цапфы поворота микроманипулятора совмещают с оптической осью главного микроскопа 7. Растровый модуль закрепляют а торцовой поверхности арретира. Ось одной из базовых липз
O растрового модулятора совмещают с оптической осью главного микроокопа перемещением в двух взаимно перпепдикулярпых направлениях (по осям XXt и УУ) растрового модуля с помощью микроманипулятора.
.. При вращении .микровинта 36 механизма пере.мещеиия растрового модуля по оси УУ клин 37 движется поступательно. Это вызывает перемещепие плавающего вкладыша 22 под действием (или против действия) силы сжатия
Q плоской иружины 39. При этом плавающий вкладыш под действне., прулшны 44 все время прижи.мается к клипу 42. образом, обеспечивается постоянное направление пере.мещепия вкладыша 22, перпендикулярно к оси XXi.
5 Аналогично нри вращении микровинта 40 механизма нере.мещения растрового модуля но оси XXi плаваюпдий вкладыш движется перпендикулярно к оси УУь Вместе с плавающим вкладышем в направлении осей XXi и
0 УУ неремещается смонтированный в нем мехапиз.м арретирования растрового модуля. Такн.м образо.м, осуществляется совмещение оси первой базовой линзы модуля с оптической осью главного микроскопа.
5 Для ориентации остальных базовых линз растрового Модуля оптическую ось главного микроокона совмещают с одпи.м из трех смотровых отверстий 32, 33 или 34. Ориентацию осуществляют поворотом микроманинулятора
0 вокруг оси цалфы до совмещения перекрестия в окуляре (Микроскопа 7 с осевыми линиями базовых липз модуля 4.
При вращеиии микровипта 46 механизма иоБорота микроманипулятора клин 47 перемеща65 ется поступательно. Это вызывает поворот
ыИКроманипулятора под действием (или против действия) сил сжатия цилиндрической пружииы буфериого устройства вокруг оси г.аифы 30. образом происходит ориептация Микрорельефа модуля 4 отиосительио технологических базовых отверстий 19.
Рамку (каркас) растровой инфор.мационной кассеты устаиавливают на базовую иоверхпость технологического спутника, базируют ла два установочиых иальца 15 и 16 технологическими базами /7 и /6 закрепляют иажимным ВИ1ГГОМ 14. Технологический спутник с рамкой :информациоииой кассеты устанавливают на базовую плиту-носитель, фиксируют установочными пальцами на базовые отверстия 19 и закрепляют эксцентриковым зажимом 20 в одном из заданных строго фнксироваипых дискретных иоложеиий. Таким образом осуществляют ориеитацию технологических баз 17 и 18 информацно пюй кассеты относительно технологических базовых отверсткй 19.
При повороте маховичка 56 рычаг 53 поворачивается вокруг оси 55. Рычаг поднимает арретир с растровым модулем и нрижимает последний, нредварительно смазанный клеем, к прозрачной нодложке 54. После арретирования растрового модуля на прозрачную подложку 54 контролируют правильность (точность) ориентации микрорельефа модуля относительно технологических баз 17 и 18. Аналогично срнентируют и арретируют все шестнадцать растровых модулей на подложку кассеты. Пр.м этоА технологический спутнике рамкой информационной кассеты переставляется с одних базовых отверстий/Рид другие. При сборке первого ряда информационной кассеты техноШгический спутник переставляется справа налево, а для сборки второго и следующих рядов -дополнительно снизу вверх.
Предмет изобретения
Устройство для сборки растровой информационной кассеты, содержащее основанне и расноложецные на иел опорную плиту, микроманипулятор с ар:ретиром, плиту-иоситель, техНологический спутник кассеты и измерительный микроскоп, отличающееся, тем, что, с целью повыигепмя точности сборки кассеты, в опор ную плиту введена полая цапфа, ось которой савмеще 1а с оптической осью микроскопа, с
платформой, на которой размещен микромаиинхлятор, а в плите-носителе вьпюлнеиы базоBbie отверстия вдоль направлений перемещения м 1кроскоиа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Микроманипулятор | 1972 |
|
SU441689A1 |
| Установка для нанесения растрового рельефа на матрицу | 1972 |
|
SU568929A1 |
| УСТРОЙСТВО для СОВМЕЩЕНИЯ РАСТРОВЫХ МОДУЛЕЙ С ИНФОРМАЦИОННОЙ КАССЕТОЙ | 1971 |
|
SU315152A1 |
| Автомат сортировки и укладки кристаллов по группам | 1975 |
|
SU560653A1 |
| РПРОФЮЗНАЯ 1пдиптяо.ган:^...-^^,^g''-•at.ij.y'lif— , ..» | 1972 |
|
SU326668A1 |
| МОЗАИЧНЫЙ ФОТОПРИЕМНИК С ПРЕДЕЛЬНОЙ ЭФФЕКТИВНОСТЬЮ ПРЕОБРАЗОВАНИЯ ИЗОБРАЖЕНИЙ: КОНСТРУКЦИИ И СПОСОБЫ ЕГО ИЗГОТОВЛЕНИЯ (ВАРИАНТЫ) | 2019 |
|
RU2731460C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МИКРбМАНИПУЛЯТОР | 1969 |
|
SU252000A1 |
| Устройство демонтажа гибкого носителя от рамки-спутника и удаления с него бракованных полупроводниковых кристаллов | 1989 |
|
SU1671574A1 |
| Электроискровой станок для обработки микродеталей | 1987 |
|
SU1495034A1 |
| Устройство для сборки охватываемой и охватывающей деталей типа вал-втулка | 1982 |
|
SU1215255A1 |


10
/
/ / /
us f
19
-Г-Г-А/
.. -tK
15 17 I/
Г
/5 ./
4S 3i J8 37
J 4i 8
52
32
50
7 5i
40
9uZ. J
.
27 22 26 25 28 5$
754 Риг. 4
