13
кронштейн 3, а К 6 - до регулируемого упора (РУ) 12. Кб имеет цельную матрицу 13сРУ14, аК5- подпружиненные пуансоны 15 в количестве, равном числу обрабатываемых изделий, находящихся-в спутника, и упоры 18, закрепленные на подпружиненной фигурной гшанке 19. Кб имеет отверстия для соединения через канал 24 с вакуумной системой. Упоры-скобы 25 закреплены на К 5. Механизм 2 нагруже-.
Изобретение относится к устройствам для технологической обработки радиоэлементов, в частности стаби- .литронов, и предназначено для рихтовки и формовки зига на выводе арматуры и контроля качества спая вывода к полупроводниковому кристаллу.
Цель изобретения - повышение производительности в работе - достигается тем, что оно снабжено каретками, подвижной платформой, подпружиненной плитой и упорами-скобами, при этом матрица, пуансоны и элементы рихтовки размещены на каретках, установленных с возможностью встречного перемещения.
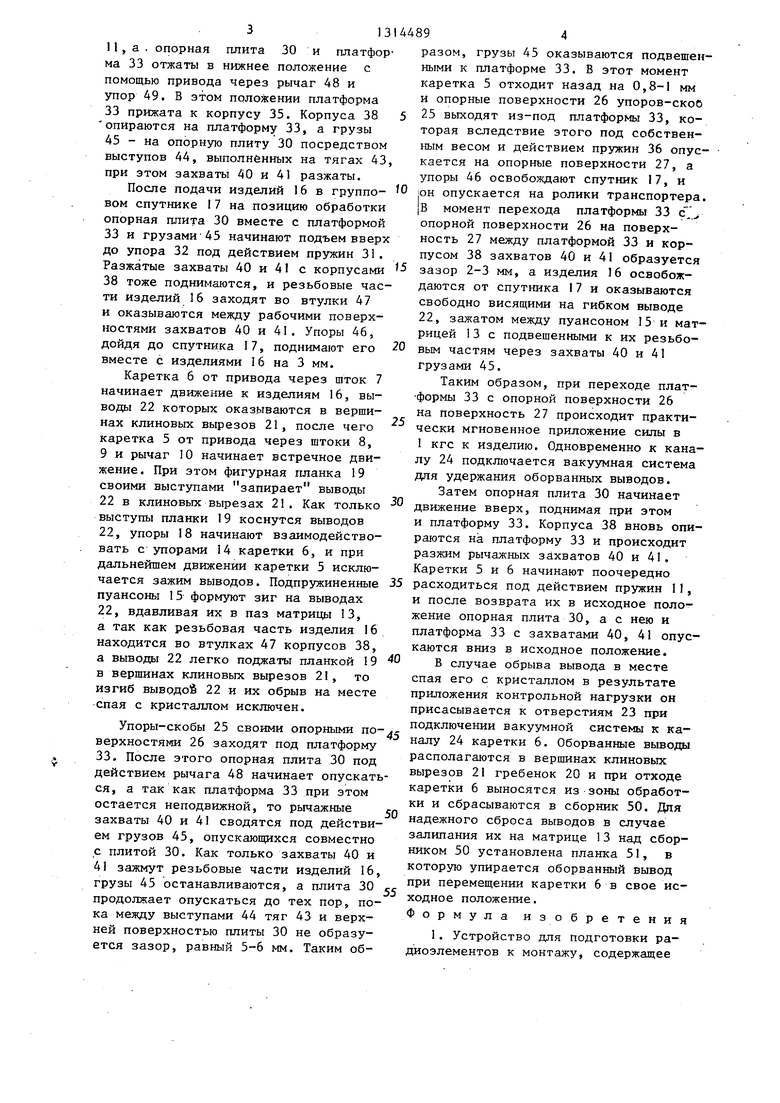
На фиг.1 схематически изображено устройство, общий вид; на фиг.2 - вид А на фиг.1, на фиг.З - разрез Б-Б на фиг,2; на фиг,4 - узел I на фиг.1.
Устройство состоит из механизма 1 формовки зига и механизма 2 нагруже- ния.
Механизм 1 формовки зига содержит кронштейн 3 с цилиндрическими направляющими 4, на которых установлены подвижные каретки 5 и 6, соединенные через штоки 7, 8, 9 и рычаг 10 с при водом.
Между каретками 5 и 6 установлены пружины 11, отжимающие (раздвигающие) каретку 5 до упора в кронштейн 3, а каретку 6 - до регулируемого упора 12. Каретка 6 снабжена цельной матрицей 13 и регулируемыми упорами 14. В каретке 5 имеются подпружиненные пуансоны 15 в количестве, равном числу обрабатываемых изделий 16, на489
ния содержит корпус 28, направляющие, на которых установлена подпружиненная плита 30, а подв ижная платформа 33 закреплена на подвижной шариковой направляющей и прижата к корпусу 35 направляющей пружинами. Изобретение предназначено для рихтовки и формовки зига на выводе арматуры и контроля качества спая вывода к полупроводниковому кристаллу. 3 з.п. ф-лы,, 4 ил.
W
)5
20
25
30
35
40
ходящихся в спутнике 17, и упоры 18, закрепленные на подпружиненной фигурной планке 19. Кроме того, на каретке 6 имеются продольные гребенки 20 с клиновыми вырезами 21 под гибкие выводы 22 изделий 16. Между гребенками 20 в каретке 6 выполнены отверстия 23, соединенные через канал 24 с вакуумной системой. Упоры-скобы 25 закреплены на каретке 5 и имеют две опорные поверхности 26 и 27.
Механизм 2 нагружения содержит корпус 28, направляющие 29, на которых установлена подвижная опорная плита 30,-поджатая вверх прз жинами 31 до упора 32. Платформа 33 закреп-. лена на подвижной шариковой направляющей 34 и прижата к корпусу 35 направляющей пружинами 36. На платформе 33 свободно установлены на штырях 37 корпуса 38 по числу обрабатываемых изделий, в которых на осях 39 посажены рычажные захваты 40 и 41. Нижние КОНЦЫ захватов 40 и 41 шарнир- но связаны с тягами 42, которые в свою очередь шарнирно соединены с тягами 43, снабженными выступами 44 и соединенными с грузами 45. Кроме того, на платформе 33 закреплены четыре упора 46, а на корпусах 38 имеются втулки 47. Плита 30 соединена с приводом через рычаг 48, воздействующий на упор 49. Под кареткой 6 установлен сборник 50 и планка 51. Оба механизма 1 и 2 собраны на общей плите 52.
Работа устройства происходит следующим образом.
В исходном положении каретки 5 и 6 раздвинуты под действием пружины
11 , а . опорная плита 30 и платфора 33 отжаты в нижнее положение с омощью привода через рычаг 48 и пор 49. В этом положении платформа 3 прижата к корпусу 35. Корпуса 38 5 опираются на платформу 33, а грузы 45 - на опорную плиту 30 посредством выступов 44, выполненных на тягах 43, при этом захваты 40 и 41 разжаты.
После подачи изделий 16 в группо- О вом спутнике I7 на позицию обработки опорная плита 30 вместе с платформой 33 и грузами 45 начинают подъем вверх до упора 32 под действием пружин 31. Разжатые захваты 40 и 41 с корпусами - 38 тоже поднимаются, и резьбовые части изделий 16 заходят во втулки 47 и оказываются между рабочими поверхностями захватов 40 и 41. Упоры 46, ойдя до спутника 17, поднимают его 20 вместе с изделиями 16 на 3 мм.
Каретка 6 от привода через шток 7 начинает движение к изделиям 16, выводы 22 которых оказываются в вершинах клиновых вырезов 21, после чего каретка 5 от привода через штоки 8, 9 и рычаг 10 начинает встречное двиение. При этом фигурная планка 19 своими выступами запирает выводы 22 в клиновых вырезах 21. Как только - выступы планки I9 коснутся выводов 22, упоры 18 начинают взаимодействовать с упорами 14 каретки 6, и при альнейшем движении каретки 5 исключается зажим выводов. Подпружиненные 35 пуансоны 15 формуют зиг на выводах 22, вдавливая их в паз матрицы 13, а так как резьбовая часть изделия 16 находится во втулках 47 корпусов 38, а выводы 22 легко поджаты планкой 19 в вершинах клиновых вырезов 21, то изгиб выводоё 22 и их обрыв на месте спая с кристаллом исключен.
Упоры-скобы 25 своими опорными по- верхностями 26 заходят под платформу 33. После этого опорная плита 30 под действием рычага 48 начинает опускаться, а так как платформа 33 при этом остается неподвижной, то рычажные Q захваты 40 и 41 сводятся под действием грузов 45, опускающихся совместно с плитой 30. Как только захваты 40 и 41 зажмут резьбовые части изделий 16, грузы 45 останавливаются, а плита 30 продолжает опускаться до тех пор, пока между выступами 44 тяг 43 и верхней поверхностью гшиты 30 не образуется зазор, равный 5-6 мм. Таким образом, грузы 45 оказываются подвешенными к платформе 33. В этот момент каретка 5 отходит назад на 0,8-1 мм и опорные поверхности 26 упоров-скоб 25 выходят из-под платформы 33, которая вследствие этого под собственным весом и действием пружин 36 опускается на опорные поверхности 27, а упоры 46 освобождают спутник 17, и JOH опускается на ролики транспортера JB момент перехода платформы 33 с опорной поверхности 26 на поверхность 27 между платформой 33 и корпусом 38 захватов 40 и 41 образуется зазор 2-3 мм, а изделия 16 освобождаются от спутника 17 и оказываются свободно висящими на гибком выводе 22, зажатом между пуансоном 15 и матрицей 13 с подвешенными к их резьбовым частям через захваты 40 и 41 грузами 45.
Таким образом, при переходе плат- формы 33 с опорной поверхности 26 на поверхность 27 происходит практически мгновенное приложение силы в 1 кгс к изделию. Одновременно к каналу 24 подключается вакуумная система для удержания оборванных выводов.
Затем опорная плита 30 начинает движение вверх, поднимая при этом и платформу 33. Корпуса 38 вновь опираются на платформу 33 и происходит разжим рычажных захватов 40 и 41. Каретки 5 и 6 начинают поочередно расходиться под действием пружин I1, и после возврата их в исходное положение опорная плита 30, а с нею и платформа 33 с захватами 40, 41 опускаются вниз в исходное положение.
В случае обрыва вывода в месте спая его с кристаллом в результате приложения контрольной нагрузки он присасывается к отверстиям 23 при подключении вакуумной системы к каналу 24 каретки 6. Оборванные выводы располагаются в вершинах клиновых вырезов 21 гребенок 20 и при отходе каретки 6 выносятся из зоны обработки и сбрасываются в сборник 50. Для надежного сброса выводов в случае залипания их на матрице 13 над сборником 50 установлена планка 51, в которую упирается оборванный вывод при перемещении каретки 6 в свое исходное положение. Формула изобретения
1. Устройство для подготовки радиоэлементов к монтажу, содержащее
513
матрицу и подпружиненный пуансон, элементы рихтовки, механизм нагружения радиоэлементов с контрольным грузом и упоры для подъема спутника с радиоэлементами, отличающееся тем, что, с целью повышения производительности в работе, оно снабжено каретками, подвижной платформой, подпружиненной плитой и упорами-скобами, при этом матрица, пуан jCOHbi и элементы рихтовки размещены на каретках, установленных с возможностью встречного перемещения, причем на одной из кареток закреплены .упоры- скобы, механизм нагружения выполнен в виде рычажных захватов, которые установлены на подвижной плат96
форме, а контрольные грузы установлены с возможностью взаимодействия с подпружиненной плитой.
2.Устройство по п., о т л и чающееся тем, что в каретках выполнены каналы для соедине1шя с вакуумной системой.
3.Устройство по П.1-, о т л и - чающееся тем, что упоры для
подъема спутника с радиоэлементами расположены на подвижной платформе.
4.Устройство по п.I, о т л и - чающееся тем, что на рабочих поверхностях рычажных захватов механизма нагружения выполнены проточки по профилю, соответствующему резьбовой части радиоэлемента.
ВидА
25
(fJU8,l
Б-Б
21
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия Свиноренко для технологической обработки радиоэлементов | 1986 |
|
SU1426755A1 |
| Устройство для подготовки радиоэлементов к монтажу | 1982 |
|
SU1039040A1 |
| Устройство для рихтовки выводов радиоэлементов | 1990 |
|
SU1714825A1 |
| Устройство для формовки и обрезки выводов радиоэлементов | 1977 |
|
SU661879A1 |
| Устройство для обработки участков стенок полых осесимметричных изделий | 1985 |
|
SU1263400A1 |
| Устройство для подготовки радиоэлементов к монтажу | 1987 |
|
SU1662024A1 |
| Устройство для монтажа радиоэлементов на печатных платах | 1985 |
|
SU1363545A1 |
| Штамп для гибки и отрезки выводов радиоэлементов | 1981 |
|
SU1026331A1 |
| Устройство для обработки выводов радиоэлементов | 1988 |
|
SU1580604A1 |
| Устройство для подготовки радиоэлементов к монтажу | 1988 |
|
SU1704306A1 |

Изобретение относится к радиоэлектронике. Цель изобретения - повышение производительности работы.устройства для подготовки радиоэлементов к монтажу. Она достигается тем, что устройство снабжено каретками (К) 5 и 6, между которыми установлены пружины 11, отжимающие К 5 до упора в / (Л
V5 W2« 1520 Л.
fS ГЭ J5
Составитель В.Титов Редактор. Ю.Петрушко Техред Н.Глушенко Корректор И.ЭрдЬйи
Заказ 2222/57 Тираж 802Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Полуавтомат технологической обработки и холодной сварки стабилитронов | |||
| МЕТАЛЛИЧЕСКАЯ ШАРНИРНАЯ СЕТКА | 1922 |
|
SU603A1 |
| Способ запрессовки не выдержавших гидравлической пробы отливок | 1923 |
|
SU51A1 |
