(54) АВТОМАТ ДЛЯ СОРТИРОВКИ И УКЛАДКИ КРИСТАЛЛОВ ПО ГРУППАМ
Известшл способ и устройство шш раэ браковки и укладки кристаллов по группам
Г2.
Сортировку и укладку кристаллов по группам производят на автомате з, содержащем координатный стал, оптическое считывающее устройство, карусель с присосками и механизмы перемещения ленточных носителей, количество которых равно количесрву групп сортируемых кристаллов,
Сортировка кристаллов производится следующим образом,, Спутник-носитель с разломанной полупроводниковой пластиной и носитель информации закрепляют на жес-ркой технологической рамке и устанавлив ют на координатный стоп автомата. При перемещении стопа на щаг считывающее устройство обеспечивает данные для памати с регистром сдвига. При расположении спутник -носителя в положении, где удал&вне (съем) кристалла был запрограммирован, .координатный стол останавливается, и одна из вакуумных присосок захватывает кристалл, а его адрес заносится в блок памяти. Когда блок памяти показывает,
что вакуумная присоска с кристаллом при вращении карусели дошла до соответствующего ленточного носителя, кристалл укладывается в ячейку пентьь-Н€Х Ителя соотверствующей группы,
В автомате предусмотрен также контроль размеров кристалпов. Ломаные и превышающие нужный размер кристаллы (двойники) сбрасываются в специальную . тару. 1
Основным недостатком известного автомата является необходимость обеспечения компенсации изменения размеров щага рас- положения кристаллов на спутнике-носителе поспе разламывания пластины.,Это объяоняется тем, что сортировку кристаллов осуществляют в соответствии с информацие з шисанной при измерении параметров криоталлов на неразломанной пластине,,
Пойле разламывания размеры пластины увеличиваются, а следовательно, и увеличивается размер шага расположения криста/ьлов на спутнике-носителе,-;
Таким образом, если перемещать жест кую рамку, на которой установлены спутник-носитель с разломанной пластиной-и носитель информации с шагом, равным шагу неразломанной пластины, то вакуумная присоска не будет совмещаться с центрами 1фисталлов, Если же перемещать рамку с щагом, равным шагу расположения кристаллов на раадоманной пластине, то оптичеокая ось считывающего устройства не будет совпадать с теми участками носителя
программы, на которых занесена запись кода, определяющая группу кристалла.
Для совмещения вакуумных присосок с центрами кристаллов, а оптической оси считывающего устройства с участками носителя программы, на которых записан код, определяющий группу соответствующих кристаллов, в автомате спужит электронный бпок по командам от которого периодически осуществляется перемещение оптического считывающего устройства относительно носителя программы на величину, равную разнсн сти шагов. Так как сигнал на корректировку положения считывающего устройства по дается периодически через несколько шагов то в промежутках между корректировками часто наблюдаются сбои в работе автомата вследствие ошибок при считывании программы,
Кроме того, сложная электронная схема корректирующего устройства подвержена действию помех, что также ведет к сбоям по шагу и частым отказам в работе. Это является основным недостатком известного автомата сортировки и укладки кристаллов по группам з.
Цель изобретения - повышение надежности автомата в работе путем точного совмещения присосок с кристаллами.
Поставленная цель достигается тем, что автомат снабжен механизмом коррекции перемещения спутника-носителя разломайной полупроводниковой пластины, состоящим из двух установленных одна на другой на верхней каретке координатного стола рамок, кинематически связанных посредством закрепленных на верхней каретке координат ного стола Г-образных рычагов с двумя кt пирами, один копир установлен на нижней каретке координатного стола, а другой на Г-образном кронштейне. Один конец Г-образного кронщтейна установлен в закрепленных на корпусе автомата направляющих, а другой - в направляющих, закрепI ленных на верхней каретке координатного стола, при этом верхняя рамка кинематически связана посредством одного Г-обра&ного рычага с копиром, установленным на Г-образном кронштейне, а нижняя рамка с копиром, установленным на нижней карет ке координатного стола,,
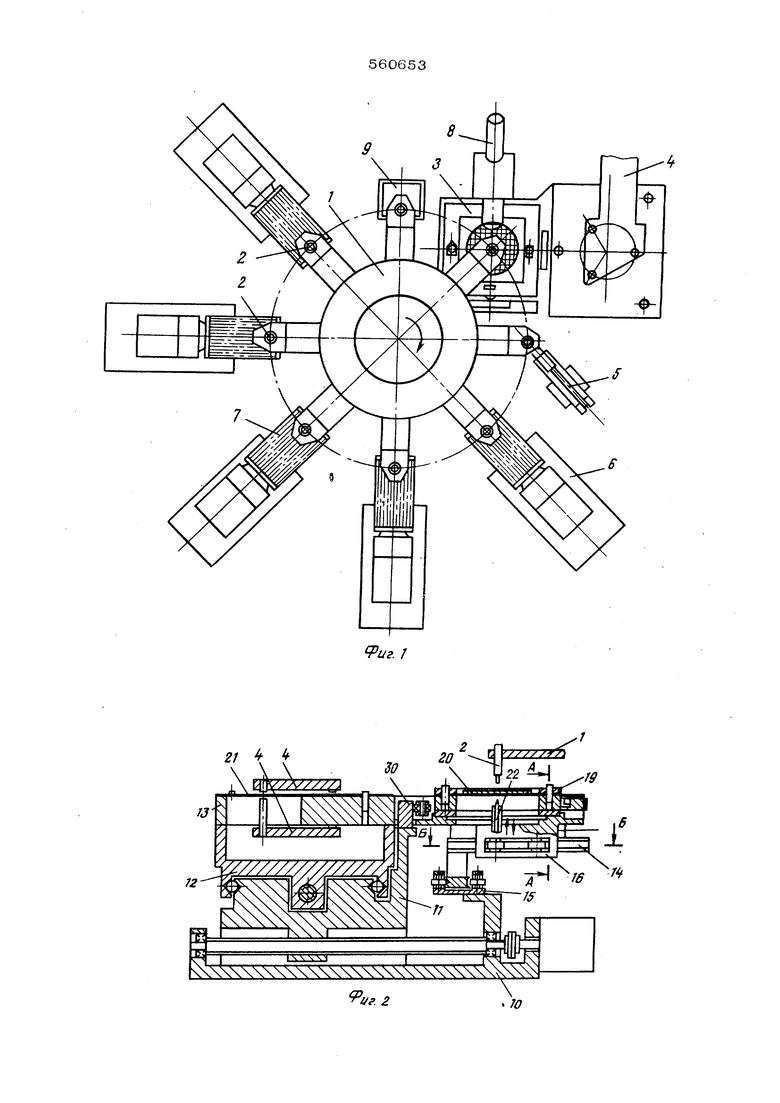
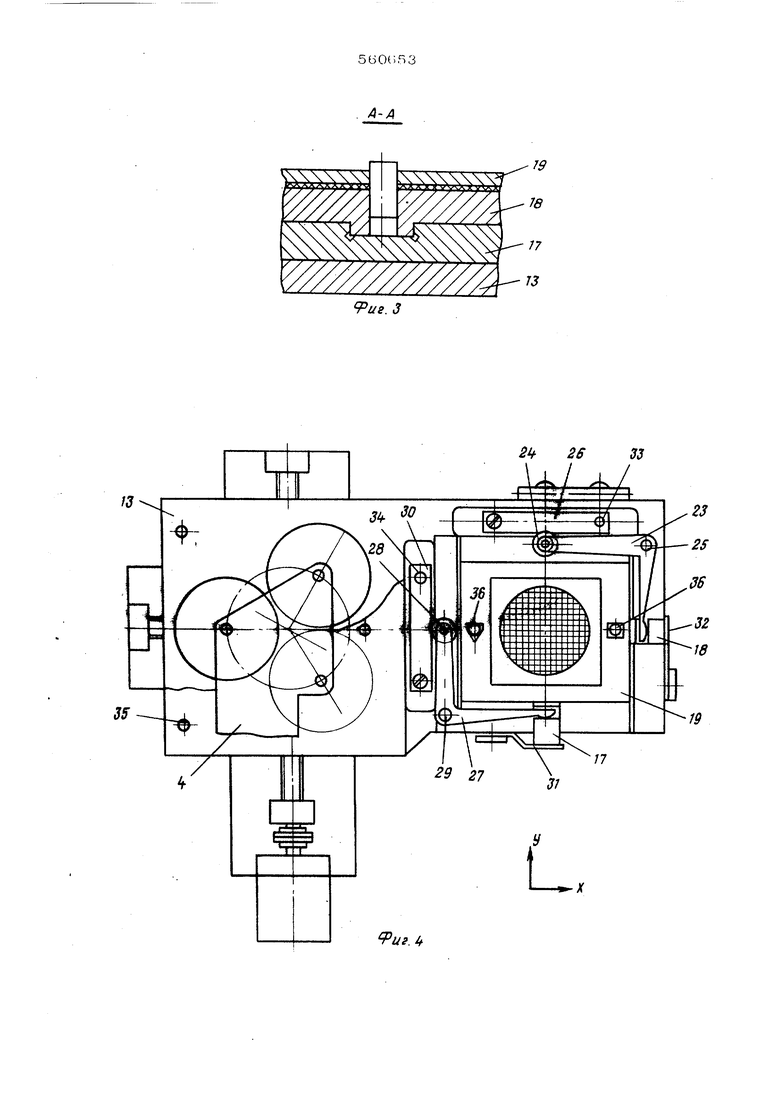
На фиг, 1 схематически изображен предлагаемый автомат, общий вид} на фиг, 2 - координатный стол автомата, разрез; на фиг, 3 - разрез А-А фиг, 2; на фиг, 4 стол, вид сверху; на фиг, 5 - разрез Б-Б фиг, 2,
Автомат сортировки и укладки кристаллов по группам содержит карусель 1 с присосками 2, координатный стоп 3, считыва щее устройство 4j механизм 5 контроля кристаллов по виду, механизмы перемещения 6 кассет 7, микроскоп 8 и 9 тару для бракованных кристаллов. Координатный стоп (фиг, 2) содержит корпус 10, нижнюю каретку 11 с приводом, верхнюю каретку 12 с приводом, закрепленную на верхней каретке 12 жесткую рамку 13, Г-образный кронштейн 14, один конец которого установлен в направгляющих 15, закрепленных на корпусе 10, а другой конец - в направляющих 16, закрепленных на жесткой рамке 13,: На жесткой рамке 13 установлены одна на другой рамки 17, 18, На верхней рамк 18 установлен спутник-носитель 19 с раз ломанной полупроводниковой пластиной 20, На жесткой рамке 13 установлен также носитель 21 программы, Для повышения надежности съема кристаллов со спутника-носителя 19 слуяит механизм 22 подкапывания кристаллов, ра ботающий синхронно с вакуумной присйэокой 2, Верхняя рамка 18 кинематически связана при помощи Г образного рычага 2 с роликом 24, закрепленного на оси 25 на жесткой рамке 13, с копиром 26, установленным на Г-образном кронштейне 14, Нижняя рамка 17 кинематически связана при помощи Г-образного рычага 27 с роликом 28, закрепленного на оси 29 на жесткой рамке 13, с копиром 30, уставов ленным на нижней каретке 11 координат ного стола. Силовое замыкание Г-образных рычагов 23, 27 с рамками 17, 18 и копирами 26 ЗО осуществляется .при помощи пружин 31 32, закрепленных на жесткой рамке 13,, Регулировка положения копиров 26, ЗО ос ществляется их поворотом вокруг осей 33, 34 при помощи эксцентриков,-Фиксируется носитель 21 на жесткой рамке 13 штифт ми 35, а спутник-носитель 19 на рамке 18 - штифтами 36,; Автомат сортировки и укладки кристаллов по группам работает следующим образом,-В исходное положение на жесткую рамку 13 устанавливается носитель 21 про граммы, а на верхнюю рамку 18 - спутник-носитель 19 с разломанной пластиной 2О, ,При этом запись кода, определяющего группу кристаллов на носителе программы, произведена с шагом t , равным шагу рао положения кристаллов на норазломанной пластине, а на спутнике-носителе крпстап- лы расположены с иитгом t О , где (Г (f- приращение шага, получившееся вследствие разламывания пластины. При помощи микроскопа 8 производят совмещение присоски 2 с базовым кристаллом полупроводниковой пластины 20 путем перемещения рамок 17, 18 при помощи специальных микровинтов (на чертежах не показаны). Затем включают привод карусели 1 и приводы верхней 12 и нижней 11 кареток координатного стопа 3, При этом присоска 2 захватывает один из кристаллов полупроводниковой пластины 20, перемещает его сначала на позицию контроля геометрических размеров, который осущес-рвляется при помощи механизма 5, а затем в соответствии с заданной программой укладывает его на одну из кассет 7, Бракова ные кристаллы сбрасываются в тару 9, Поспе сьема очередного крисгаппа со спутника-носитепя 19 нижняя каретка 11 вместе с жесткой рамкой 13, на которой установлен носитель 21, перемешается по координате X на шаг t , равный шагу расположения кристаллов на неразломанной пластине, .Так как запись кода, определяющего группу кристаллов, был.а сделана с таким же шагом, то оптическая ось считывающего устройства совпадает с центром участика носителя программы, на котором запис на информация о группе очередного кристалла, . При перемещении нижней каретки 11 по координате X положение корпуса ЗО, Г-о&разного рычага 27 и нижней рамки 17 о-рносительно жесткой рамки 13 не изменяет ся,.Не изменяется также положение Г-О&разного кронштейна 14 относительно корпуса 10, а под действием копира 26 Г-обратный .рычаг 23 поворачивается вокруг оси 25 и сообщает верхней рамке 18 дополнительное перемещение относительно жесткой 13, равное О , Таким образом, при перемещении носителя- 21 программы на шаг t по коорд - , нате Y происходит перемещение спутниканосителя 19 на шаг, равный i d в том же направлении. Благодаря этому достигатся совмещение оси присоски 2 с кристалом, а оптической оси считывающего устройтва - с центром того участка носителя рограммы, на котором записана информаия о группе этого кристалла. Когда ряд кристаллов, расположенный по оординате X, будет полностью снят со спут ика-носителя 10, включается привод верхей каретки 12, и координатньгй стоп переещается на шш t по. координате У, При том Г-образЕнчй крониггойн 14 переместит я в направляю.иих 15 относитолыю корпу- са 10 также на шаг, равный t , и полож ние .копира 26 и Г-образного рычага 23 относительно жесткой рамки 13 не изменяется, а под действием копира 30 Г-обрааный рычаг поворачивается вокруг оси 29 и сообщает нижней рамке 17 и вмеотей с ней верхней рамке 18 догюпнительно перемещение относительно жесткой рамки 13, равное О , Таким образом, при перемещении носителя программы на шаг t по координате У происходит перемещение спутника-носигтеля 19 на шаг, равный t а в том же направлении,, Предложенная конструкция позволяет компенсировать изменение размеров шага расположения кристаллов на спутнике-нос№ теле после разламывания пластины, повышает точность укладки рассортированных кристаллов в кассеты и надежюсть работы автомата. Конструкция автомата сортиро ки и укладки кристаллов по группам проще за счет исключения приводов перемещения считывающего устройства и электронного бпока их управпения. и 3 о б р Формул е т е н и я Автомат для сортировки и укпадки криста JIOB по группам, содержащий корпус координатный стол с приводными верхней и ни ней каретками для шагового перемещения носителя nporjiaMMbi и спутник -носителя оманной иолупроводиикоьий iLitiC4niU)i, считывающие устройство и к.чрусель с ирисооками, о г п и ч а ю щ н н с я тем, что с целью повышения надеж 1остц автомата в работе путем точного совмещения присосок с кристаллами, он снабжен механизмом коррекции перемещения спутника-носителя раэломанной полупроводниковой пластины, состоящим из двух установленных одна на другой на верхней каретке координатного стола рамок, кинематически связанных посредст вом закрепленных на верхней каретке коо{ динатного стола Г-образных рычагов с двумя копирами, один копир установлен на нил4ней каретке координатного стола, а другой - на Г-образном кронштейне, один конец которого установлен в закрепленных на корпусе автомата направляющих, а другой - в направляющих, закрепленных на верхней каретке координатного стола, при этом верхняя рамка кинематически связана посредством одного Г-образного рычага с копиром, установленным на Г-образном кронштейне, а нижняя рамка - с копиром, установленным на -нижней каретке координатного стола,: Источники информации, принятые во внимание при экспертизе: 1.Патент США № 37203О9, 209-73, 1970 г. 2.Журнал EDN вып. 14, 1969. № 15 оборудование американской фирмы ТебееЗул ТАС;Модель Sistenr-iooo, 3.Проспект фирмы США S-isteTTT-lOOO автомат DS -1011
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТ ДЛЯ СБОРКИ КАРТОННЫХ КОРОБОК | 1990 |
|
RU2037425C1 |
| Камера для фотосъемки на листовую пленку | 1980 |
|
SU1120275A1 |
| Механизм шагового перемещения | 1975 |
|
SU652549A1 |
| Устройство для шаговой подачи изделий | 1978 |
|
SU722817A1 |
| Автомат-разгрузчик изделий с сушильной вагонетки | 1982 |
|
SU1033336A1 |
| Автоматическая линия для упаковывания штучных изделий в картонные пачки | 1990 |
|
SU1782870A1 |
| Автомат для набора пластин фильтра | 1977 |
|
SU633709A1 |
| СПОСОБ ПОДГОТОВКИ КРИСТАЛЛОВ к СБОРКЕ | 1973 |
|
SU364047A1 |
| Устройство для сортировки радиодеталей по электрическим параметрам | 1981 |
|
SU1010736A1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |

Pui.f,
75
us.f
-16
Ч/УМХЛ
ттк
1
16
/«
