Изобретение относится к способам управления транспортными потоками и может быть использовано в открытых разработках полезных ископаемых, где используются аппаратура формирования и выдачи управляющих сигналов, а также управляющий комплекс, способный оперативно рассчитывать оптимальные маршруты о
Целью изобретения является повышение эффективности управления.
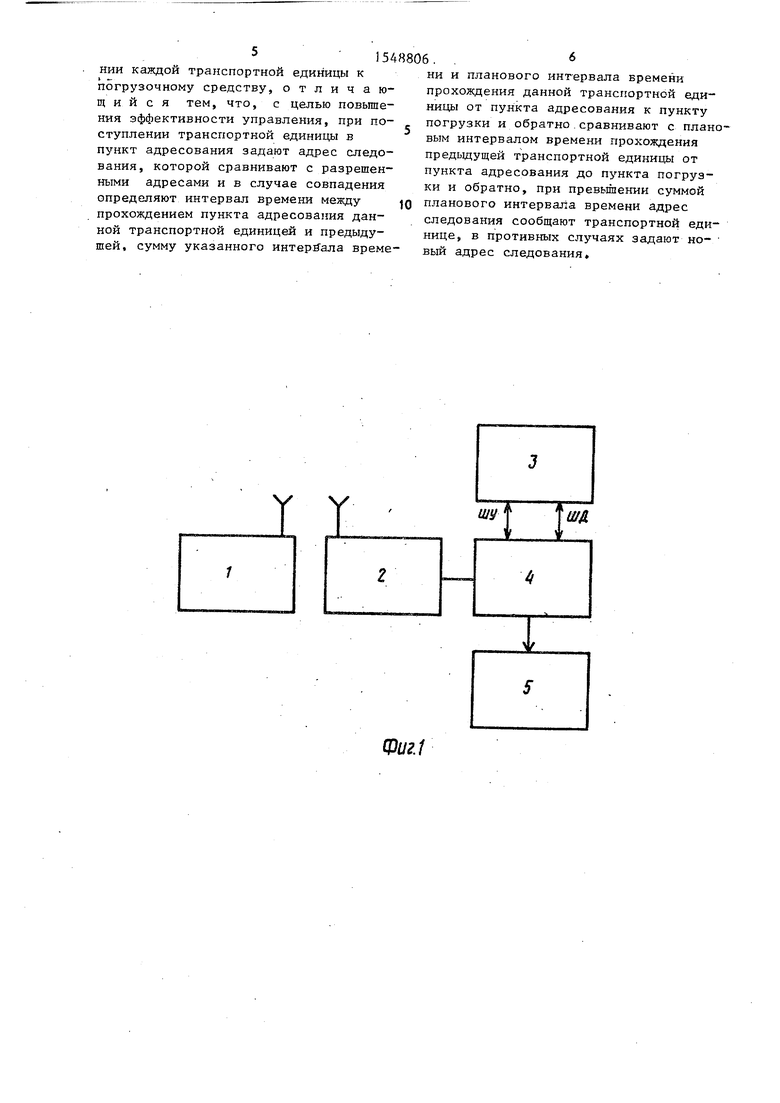
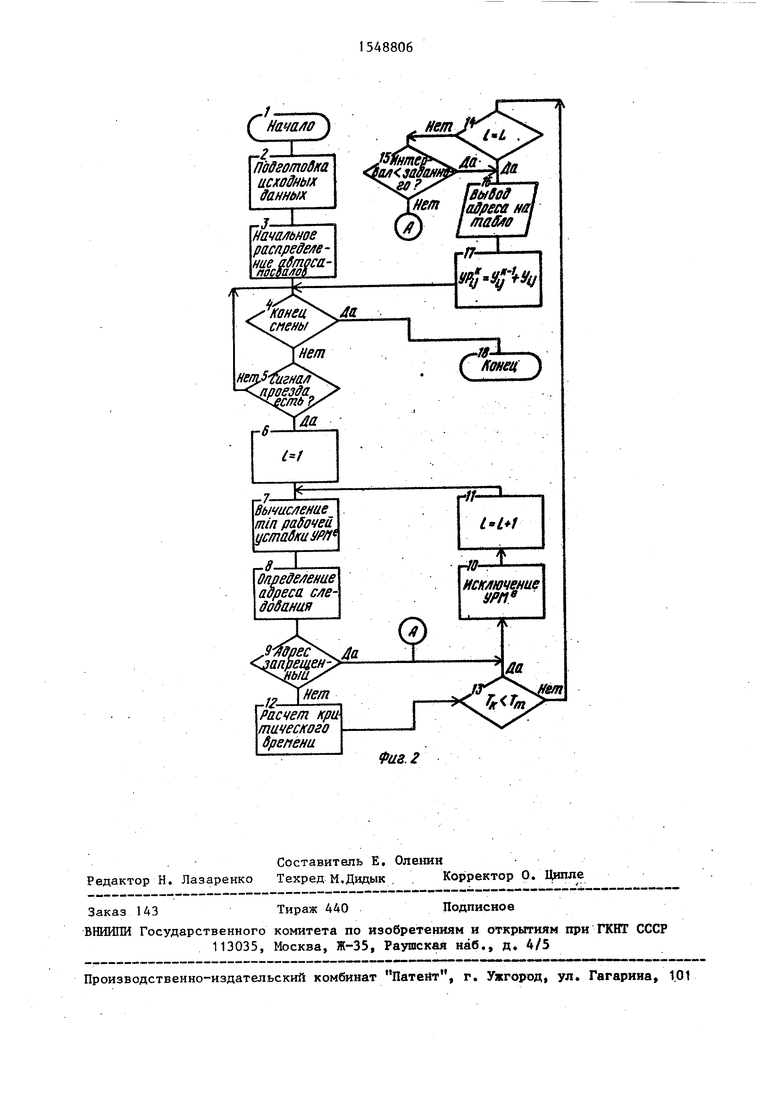
На фиг. 1 представлена схема уст- i ройства для реализации способа; на фиг. 2 - блок-схема алгоритма работы устройства для реализации способа.
Устройство содержит передатчик 1, устанавливаемый на каждой транспорт- ной единице, приемник 2, блок 3 обработки информации, блок 4 ввода-вы- 1 вода, индикатор 5. Блок 3 обработки информации выполнен в виде ЭВМ серии СМ.
Реальная ситуация и структура рудного месторождения требует учитывать ряд обстоятельств. Адрес следования существует только теоретически: он может быть выбран по алгоритму управления, но практически подъезд к пункту погрузки от данного пункта адресования невозможен. Ликвидация очередей
ел
00 00 О
о
на погрузку при большой разнице сменных планов пунктов погрузки достигается ритмичной посылкой не более определенного числа транспортных единиц в единицу времени к одному пункту погрукзи. Кроме того, возможно формальное адресованиеа В карьере, где плечи откатки значительно различаются по величине, может воникнуть ситуация, при которой транспортная единица получившая адрес дальнего пункта погрузки, возвращается к пункту разгрузки позже транспортной единицы, адресованной после него, но к ближнему пункту погрузки.
Способ осуществляется следующим образом
До начала смены составляется матрица разрешенных маршрутов, таблица плановых интервалов времени на проезд от пунктов адресования до пункта погрузки и обратноf задается интервал времени между адресованием к одному пункту погрузки - ритмичность, рассчитываются уставки относительно интенсивности посылок транспортных единиц по каждому адресу задается время окончания схемы
Уставки определяются из соотношения
Q
(О
Ч
где у.. - расчетная установка на йар J
Q шру.те от пункта погруки ПП. до пункта разгрузки ПР ; общий план перевозок по ка
Ч:
ч
рьеру за смену;
сменный план перевозок по
маршруту ij
Получается матрица расчетных уставок у- } , Далее заполняется матрица рабочих уставок (уР;| следующим образом:
yP;j 0,если qsj 0 (2)
max число , если q -0 ,
В начале смены к каждому пункту погрузки адресуется по одной транспортной единице следуя схеме: от самого дальнего пункта погрузки к самому ближнему о Все остальные адресования происходят по следующему алгоритму.
При проезде транспортной единицы через пункт адресования она подает сигнал о проезде., процессор определяет минимальную рабочую уставку и соответствующий ей адрес следования.
0
Q
5
0
5
0
5
п
Этот адрес сверяется с матрицей разрешенных адресов, находящийся в оперативной памяти, и, если он оказывается запрещенным, определяется новый адрес, соответствующий следующей по величине уставке0 Определяется время, прошедшее после проезда пункта адресования предыдущим автосамосвалом Известно времяs затрачиваемое автосамосвалом для проезда от пункта адресования до пункта погрузки и обратно. Рассчитывается критическое время
VT.,,+T,(з)
где - время, затрачиваемое автосамосвалом для проезда от пункта адресования п к i-му пункту погрузки и обратно; Т - время f прошедшее после проезда пункта адресования предыдущим автосамосвалом. Если Т Т„,(где Тт - время, затрачиваемое предыдущим автосамосвалом для проезда от пункта адресования к m-му пункту погрузки и обратно), из массива рабочих уставок ГуРг1 процессор выбирает новую минимальную уставку, исключая ранее выбранную. Проверяется ритмичность адресования о. Адрес, удовлетворяющий всем перечисленным требованиям, высвечивается водителю на внешнем индикаторе0
В случае, если ни один из возможных адресов не удовлетворяет всем требованиям, требование ритмичности исключается В этом случае, по крайней мере один адрес, а именно адрес предыдущей посылки, удовлетворяет оставшимся требованиям,,
Затем рабочая установка этого адреса изменяется по формоде
уР§ -уРу +У,) ,(4)
где k - порядковый (с начала смены) номер транспортной единицы, направленной по адресу i j, Происходит переход на ожидание сигнала проезда.
Перед каждым переходом на ожидание сигнала проезда производится проверка на окончание смены, а именно текущее время Tt сравнивается с временем окончания смены Т.0. В случае ТТ7/Т0 алгопитм заканчивает ра- боту0
Формула изобретения Способ управления движением автомобильного транспорта на открытых разработках, основанный на адресовании каждой транспортной единицы к погрузочному средству, отличающийся тем, что, с целью повышения эффективности управления, при поступлении транспортной единицы в пункт адресования задают адрес следования, которой сравнивают с разрешенными адресами и в случае совпадения определяют интервал времени между прохождением пункта адресования данной транспортной единицей и предыдущей, сумму указанного интервала време1548806
ни и планового интервала времени прохождения данной транспортной единицы от пункта адресования к пункту погрузки и обратно сравнивают с плановым интервалом времени прохождения предыдущей транспортной единицы от пункта адресования до пункта погрузки и обратно, при превышении суммой планового интервала времени адрес следования сообщают транспортной единице, в противных случаях задают новый адрес следования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108625C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2108626C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ НАЗЕМНОГО ТРАНСПОРТА | 1995 |
|
RU2113012C1 |
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Способ регулирования движения транспортных единиц | 1989 |
|
SU1672505A1 |
| Устройство для управления транспортными средствами | 1976 |
|
SU615526A1 |
| СПОСОБ АДРЕСОВАНИЯ | 1995 |
|
RU2100265C1 |
| Устройство для адресования подвижных объектов | 1979 |
|
SU767776A1 |
| УСТРОЙСТВО ДЛЯ ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ КАРЬЕРНЫМ АВТОТРАНСПОРТОЛ1 | 1973 |
|
SU408886A1 |
Изобретение относится к способам управления транспортными потоками и может быть использовано в открытых разрезах месторождений полезных ископаемых, где используются аппаратура формирования и выдачи управляющих сигналов, а также управляющий вычислительный комплекс, способный оперативно рассчитывать оптимальные маршруты. С целью повышения эффективности управления транспортной единицей в пункте адресования задается адрес следования, который сравнивается с разрешенными адресами. В случае разрешения определяется время, прошедшее после проезда пункта адресования предыдущей транспортной единицей. Сумма этого времени с плановым временем проезда данной транспортной единицы от пункта адресования до пункта погрузки и обратно сравнивается с плановым временем проезда предыдущей транспортной единицы от пункта адресования до пункта погрузки и обратно. При превышении суммой указанного планового времени формируется адрес следования. В противных случаях задается новый адрес следования. 2 ил.
I I
ШУ
ША
Фиг.1
| Способ регулирования грузового автомобильного транспорта на открытых разработках | 1971 |
|
SU651356A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
