t
: Изобретение относится к оперативному управлению движением карьерного автотранспорта, в частности, на вскрьаиных перевозках.
Известно .устройство для управления работой автотранспорта, основанное на автоматическом распределении его по забоям в зависимости от времени обслуживания и степени выполнения экскаваторами сменного задания Щ .
Однако этот метод позволяет устранить лишь грубые ошибки планирования и не ликвидирует простои от избытка или недостатка автотранспорта.Он приводит к равномерному распределению простоев экскаваторов или к уравниванию длины очереди авт осамосвалов у экскаваторов при их избытке. При наличии одного забоя и одного автоотвала в комплексе этот метод управления тер;яет смысл.
Известно также устройство для автоматического контроля регулярности движения городского транспорта,основанное на измерении рассогласования между заданным план-графиком и фактическим временем исследования транспортных единиц в контрольных точках маршрута. Главным парг1метром .управления здесь является средняя
скорость движения транспортных единиц 2 .
Однако в условиях карьера скорость движения может быть только вспомогательным параметром управления, так как целью управления является получение максимума производительности. В часто изменяющихся условиях погрузки и транспортирования гор0ной массы план-графики движения нужно рассчитывать практически на каждый рейс, а такой расчет основан на соблюдении заданного интервала следования автомобилей, что требует усреднения индивидуального мастерства водителей. Еще один недостаток этого метода состоит в необходимости установки напольных средств в контрольных пунктах, что резко усложня0ет задачу в условиях часто меняющихся координат отвала, забоя и транспортных коммуникаций на открытых разработках.
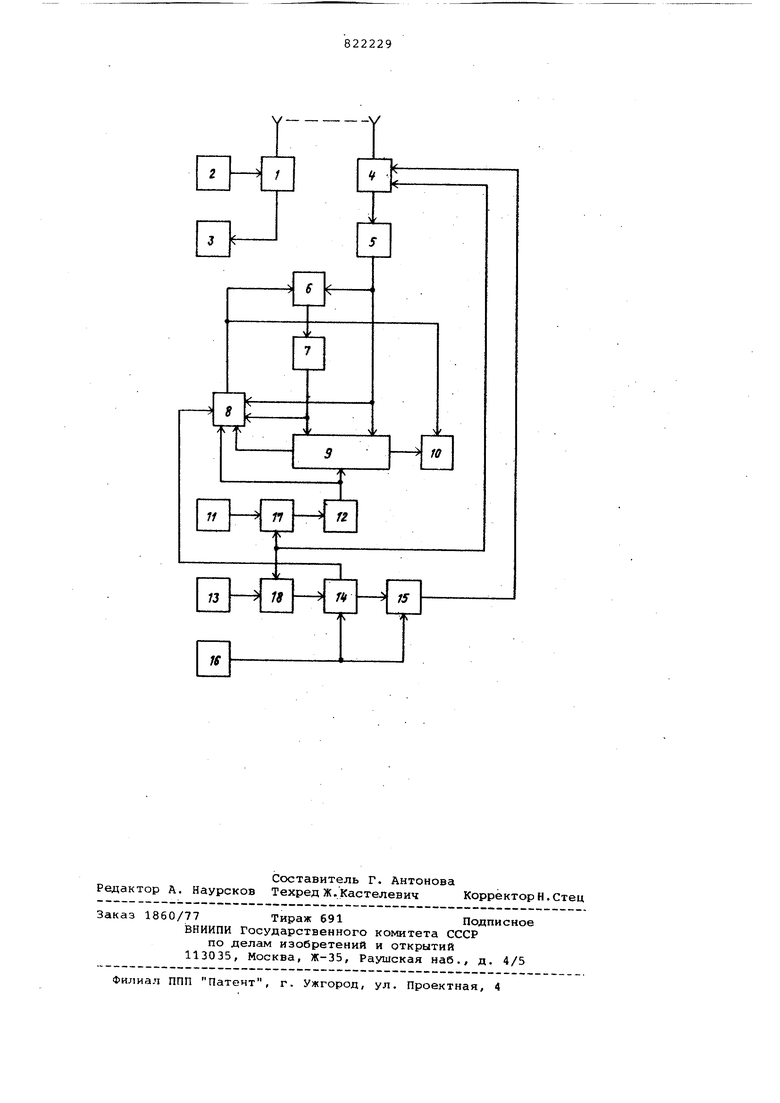
5 Цель изобретения - увеличение производительности автотранспорта за счет снижения его простоев в забое и максимального использования скоростных качеств автосамосвалов и профессиональных способностей водителей. Указанная цель достигается тем, что между датчиком движения и блоком приема-передачи информации автомобильного комплекта включены счетчик и регистр памяти фактического рассто яния транспортирования груза,, информация о котором при каждом цикле передается в блок регистрации производительности автосамосвалов экскава-торного комплекса, а между регистром памяти заданного враменного параметра движения и схемой сравнения автомобильного комплекта включены блок умножения этого параметра на управляющий параметр c. , и формирователь заданного времени транспортирования груза, а также блок управления, который на основании информации о заданном времени движения с грузом от формирователя и о фактическом време ни от регистра памяти формирует новый параметр управления и передает информацию о нем в блок управл ния . На чертеже изображено устройство для осуществления способа. Устройство состоит из экскавато ного комплекта, содержащего приемно передающий блок 1, регистр 2 памяти временных параметров погрузки и блок 3 регистрации производительнос ти автосамосвалов в тонко-километрах и п автомобильных комплектов. Автомобильный комплект содержит приемно-передающий блок 4, регистр 5 памяти заданного времени движения, блок б умножения, регистр 7 па мяти формируемого параметра движени формирователь 8 параметра управления, блок 9 сравнения, блок 10 инди кации, генератор 11 импульсовурегистр 12 памяти фактического времен движения,датчик 13 движения,счетчик 1 пройденного пути, регистр 15 памяти фактического расстояния тран портирования груза, датчик 16 разгрузки автосамосвала и элементы И 1 и 18. Автоотвал выполнен не по традиционной радиальной схеме, при которой сначала заполняется ближняя часть емкости, а по продольной схеме, при которой заполнение емкости отвала осуществляется по всей его длине с предварительной отсыпкой на всю дл-ину отвала пионерной насыпи. Благодаря устройству продольнопротяженного автоотвала, расстояние транспортирования груза можно изменять в пределах фронта разгрузки ,, вследствие чего для каждого автосамосвала в каждом рейсе можно задавать интервал оборачиваемости в пре делах ОБ.тлп oB.i оБ. Устройство работает следующим образом. При погрузке автосамосвалов экскаватором в блок 3 регистрации производительности в соответствии с их условными номерами, поступает информация о количестве погруженной гор- ной массы, а в регистре 2 памяти формируется информация об интервале оборачиваемости погружаемого автосамосвала, исходя из фактических параметров погрузки остальных -OB. , где (. интервал погрузки i-го автосамосвала, мин; п - количество закрепленных автосамосвалов. В момент отправки автосамосвала на разгрузку, информация из регистра 2 через приемно-передающие блоки 1 и 4 передается в регистр 5 автомобильного комплекта отправляемого автосамосвала, откуда поступает в блок 6 умножения, где умножается на скоростной коэффициентов (управляемый параметр). . .i-- ;-.t.., ъад. время движения с грузом, задаваемое в предыдущем цикле, мин; .-i отклонение временного параметра, мин. Информация о сформированном управляющем параметре л; из блока 6 поступает в регистр 7, где фиксируется число импульсов, соответствующее выражению ,aA. nto6M-tp), (5) где tp - время разгрузки автосамос., вала, ЧаА4 Р® движения с грузом, задаваемое в текущем цикле, мин. Одновременно сигналом отправки, поступающим из приемо-передающего блока 4, открываются элементы И 17 и 18, и секу1адные импульсы от генератора 11 начинают пой упать в регистр 12 памяти фактического времени движения автосамосвала, а импульсы от датчика 13 движения с заданной дискретностью начинают поступать в счетчик 14 пройденного пути с грузом. Если количество автосамосвалов выбрано правильно, т.6. удовлетворяется условие (2), то совпадение фактического времени движения груженого автосамосвала с заданным будет в тот момент, когда автосамоо- - движется
вдоль фронта разгрузки, вследствие чего с выхода блока 9 сравнения поступает сигнал на разгрузку в блок 10 индикации.
Водитель, подчиняясь команде на азгрузку, разворачивается для ее осуществления. В момент поднятия кузова автосамосвала срабатывает датчик 16 разгрузки, выходом которого осуществляется перенос информации из счетчика 14 в регистр 15 памяти и реверс счетчика 14.
Между тем, генератор 11 продолжает посылать секундные импульсы в регистр 12 памяти, накапливающий фактическое время движения, а блок 9 сравнения начинает сравнивать коды регистров 5 и 12.
Возможны три варианта блока 9 сравнения. При первом варианте по прибытии автосамосвала под погрузку число импульсов в регистре 12 памяти фактического времени движения не остигает заданного регистром 5 (ранее прибытие). Тогда сигналом обнуившегося счетчика 14 запускается в работу формирователь 8 параметра управления, в котором сигналом с выхода регистра 12 памяти формируется величина рассогласования &t| со знаком плюс.
При втором варианте сравнение коов регистров 5 и 12 происходит при движении автосамосвала в забой (опозание) . В зтом случае формирователь 8 информацию о величине рассогласования знаком минус получит по сигналу с выхода регистра 5 питания. При обоих вариантах сформированный формирователем 8 параметр управления л; передается в блок 6 умножения и блок 10 индикации.
При третьем варианте из-за отсутствия рассогласования (ut О) формирователь 8 не включается в работу.
Связь автомобильного комплекта устройства с экскаваторным устанавливается при остановке автосамосвала в забое, в результате чего сигналом с выхода блока 4 приема-передачи информации закрываются элементом И 17 и 18, а информация из регистра 15 памяти фактического расстояния транспортирования совместно с условным номером автосамосвала поступает в блок 3 регистрации производительности экскаваторного комплекта.
Использование нового способа автоматического управления движением автотранспорта повышает производительность амос валов и экскаватора за счет сокращения их простоев, в процессе управления движением значительная роль отводится водителям, заинтересованным в росте производительности .
Условная экономия от внедрения предлагаемого изобретения составляет 494 тыс. руб
Формула изобретения
Устройство для управления движением автотранспорта, содержащее установленные на экскаваторе приемо-передающий блок, вход которого подклю10чен к выходу регистра памяти временных параметров погрузки, а выход подключен к блоку регистрации производительности, и установленные на каждом автотранспортном средстве приемо15передающий блок, выход которого подключен ко входу регистра памяти заданного времени движения, регистр памяти фактического времени движения, выход которого соединен с первь 1 вхо20дом блока сравнения, ко второму входу которого подключен выход регистра памяти заданного времени движения,регистр памяти формируемого параметра движения, датчик движения, элементы И, первый вход одного из которых сое25динен с генератором импульсов, датчик разгрузки, выход которого подключен к счетчику пройденного пути, о тличающееся там, что, с целью повышения производительности
0 автотранспорта, в устройство введены установленные на автотранспортном средстве блок умножения, формирователь параметра, управления, регистр памяти фактического расстояния транс5портирования груза, выход которого подключен ко входу приемо-передающего блока, входы блока умножения соединены с выходом регистра памяти заданного времени движения и выходом
0 формирователя параметра управления, входы которого соединены с выходами регистра памяти заданного времени движения, блока сравнения, регистра памяти фактического времени движения и выходом счетчика пройденного пути,
5 второй вход одного элемента И и первый вход другого элемента И соединены с выходом приемо-передающего блока, выход одного элемента И соединен со входом регистра памяти фактическо0го времени движения, выход датчика движения соединен со вторым входсм другого элемента И, выход которого подключен к регистру памяти фактического расстояния транспортирования
5 груза, который соединен с датчиком разгрузки.
Источники информации, принятые во внимание при экспертизе
.1. Авторское свидетельство СССР 310229, кл. G 05 В 11/01, 1972.
0
2. Авторское свидетельство СССР 359689, кл. G 08 G 1/12, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоканальное устройство для управления движением транспортного средства | 1989 |
|
SU1702395A1 |
| Устройство для управления транспортными средствами | 1974 |
|
SU524207A1 |
| Устройство для контроля и регистрации работы экскаватора | 1977 |
|
SU720445A1 |
| Устройство для адресования и контроля движения автосамосвалов | 1976 |
|
SU732895A1 |
| Устройство для управления транспортными средствами | 1978 |
|
SU734727A1 |
| Устройство для управления подвижными и рассредоточенными объектами на карьере | 1973 |
|
SU485457A1 |
| Система для контроля и управления автомобильно-экскаваторными комплексами | 1977 |
|
SU734725A1 |
| Устройство для обработки данных комплекса "карьер-обогатительная фабрика" | 1977 |
|
SU670949A1 |
| Способ районирования экскаваторных забоев для управления работой экскаваторно-автомобильных комплексов | 2020 |
|
RU2738919C1 |
| Устройство для автоматического адресования и контроля движения автосамосвалов | 1972 |
|
SU440315A1 |