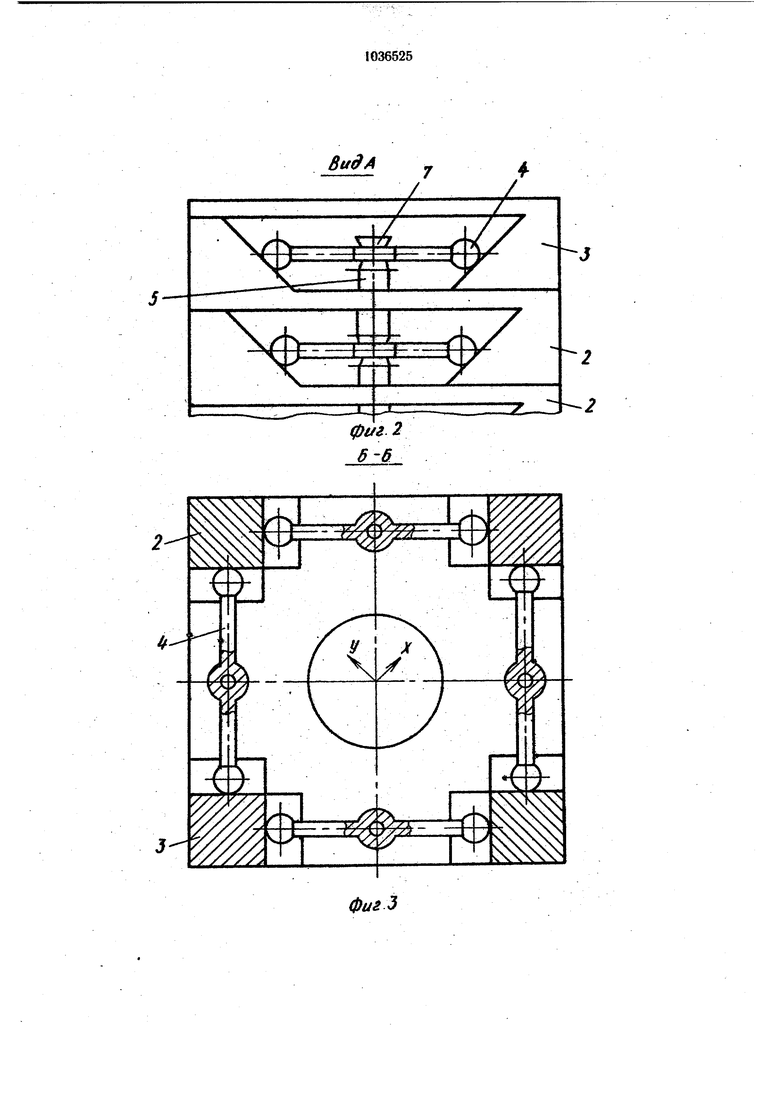
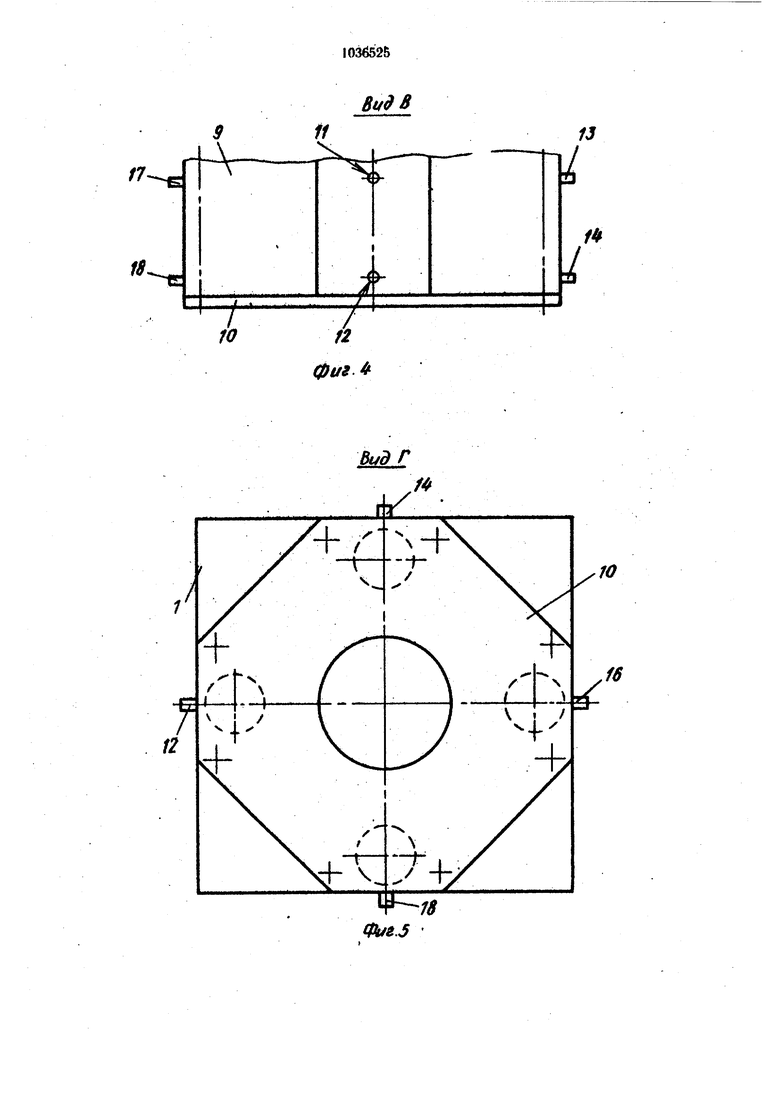
Изобретение относится к .Машинострое ниго, а именно к манипуляторам для Механизации технологических процессов, содержащих подъемно-транспортные операции. Известен исполнительный орган манипулятора, содержащий привод, основные и переходные звенья, причем первое основное звено связано с основанием, а последние - с захватом, а также гибкий элемент и стержни 1. . Недостатками известного , механизму являются большие габариты по высоте, а также слол ность конструкции, обусловленная большим числом шарнирных соединений.. Цель изобретения - уменьшение высоты исполнительного органа при сохранении грузоподъемности и маневренности. Эта цель достигается тем, что в исполнительном органе манипулятора основное звенья выполнены в виде квадратных пластин, в центральных отверстиях которых расположены переходные звенья, причем на верхней и нижней сторонах по соответствующим диагоналям квадрата в его углах выполнены скосы к плоскости пластины на угол, больший угла трения основного звена в стержня, «.направленные внутрь пластины, при этом скосы смежных звеньев образуют поверхность типа «ласточкин хвост, а стержни выполнены в виде двуплечих рычагов, смонтированных на переходных звеньях. На фиг. 1 изображен исполнительный орган манипулятора, общий вид в разрезе; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. ; на фиг. 4 - вид В на фиг. 1; на фиг. 5 - вид Г на фиг. ; на фиг. б и 7- основное звено исполнительного органа, общий вид (в проекционной связи). Исполнительный орган манипулятора содержит основание I и кинематическую цепь из сочлененных между собой и с основанием I основн ых звеньев 2. Последнее основное звено 3 связано с захватом (не показан). Основные звенья 2 и S выполнены в виде квадратных пластин с отверстием в центре квадрата. На пластинах на верхней и нижней сторонах по соответствующим диагоналям квадрата в его углах выполнены скосы с плоскости пластины. С этими поверхностями взаимодействуют сферические головки двуплечих рычагов 4. Для снижения трения сферические головки могут быть заменены роликами. Между рычагами 4 установлены переходные звенья 5, расположенные в отверстиях основных звены ев 2 и 3. Гибкий элемент б (трос) пропущен в отеерст я переходных звеньев 5, в отверстТ1я рычагов 4, заделан во вкладыше 7 и связан с поршнем 8 лового цилиндра. Из фиг. 3 видно, что устройство содержит четыре системы рычагов 4, число которых в каждой системе рэвно числу звеньев 2 и 3. Каждая система гибким элементом 6 (тросом) связана со своим силовым цилиндром. Цилиндры содержат общий корпус 9, в котором установлены поршни 8, и Сбщую крышку 10. Рабочая жидкость к силовым цилнядраМ поступает через штуцеры II и 12 (фиг. I) 13 и 14 (фиг. 4), 15 и 16 (фиг. I), 17 и }8 (фиг. 4). Пружины 19 предназначены для сохранения неизменяемого состояния системы при отсутствии давления в силовых цилиндрах. Исполнительный орган манипулятора работает следующим образом. В исходном положении (давление в.силовь х цилиндрах отсутствует или одинаково во всех поршневых и штоковых полостях) система неизменяема. Если необходимо йолучить перемещение вдоль оси х (фиг. 3), давление должно быть подано к штуцерам штоковых полостей двух силовых цилиид- ров (фиг. 1 и 4). При этом гибкие элементы 6 передают усилие от поршней 8 к вкладышам 7 и далее-последовательно на рычаги 4 и переходные звенья 5, обеспечивающие механическую связь между смежными рычагами 4. Сферические головки этих рычагов взаимодействуют со скошенными поверхностями оснований f и звеньев 2 и 3, вызывают сдвиг смежных звеньев друг относительно друга, а также относительно неподвижного основания 1. Суммарное перемещение равно перемещениям всех звеньев 2 и последнего основного звена 3. Перемещение в направлении, противоположном оси К- (фиг. 3), получим, подав рабочую среду к штуцерам 11 и 13. Перемещерие вдоль оси у (фиг. 3) получим, подав рабочую среду к штуцерам 13 и 15, а против оси у -- к штуцерам Ни 17. Вращение по часовой стрелке (фиг. 3) получим, подав давление к штуцерам 13 И 17, а против часоВой стрелу - к штуцерамИ и 15. При.этом усилия на протитволежащих системах рычагов вызывают появление вращательных пар, необходимых для общего поворота выходного звена 3, равного сумме поворотов всех звеньев. Использование предлагаемого изобретения позволит сохранить прежнюю гру- зоподъемность и маневренность исполни-, тельного органа манипулятора при уменьшении его высоты.
Btf$A
Фи2 3
фиг
Btf9S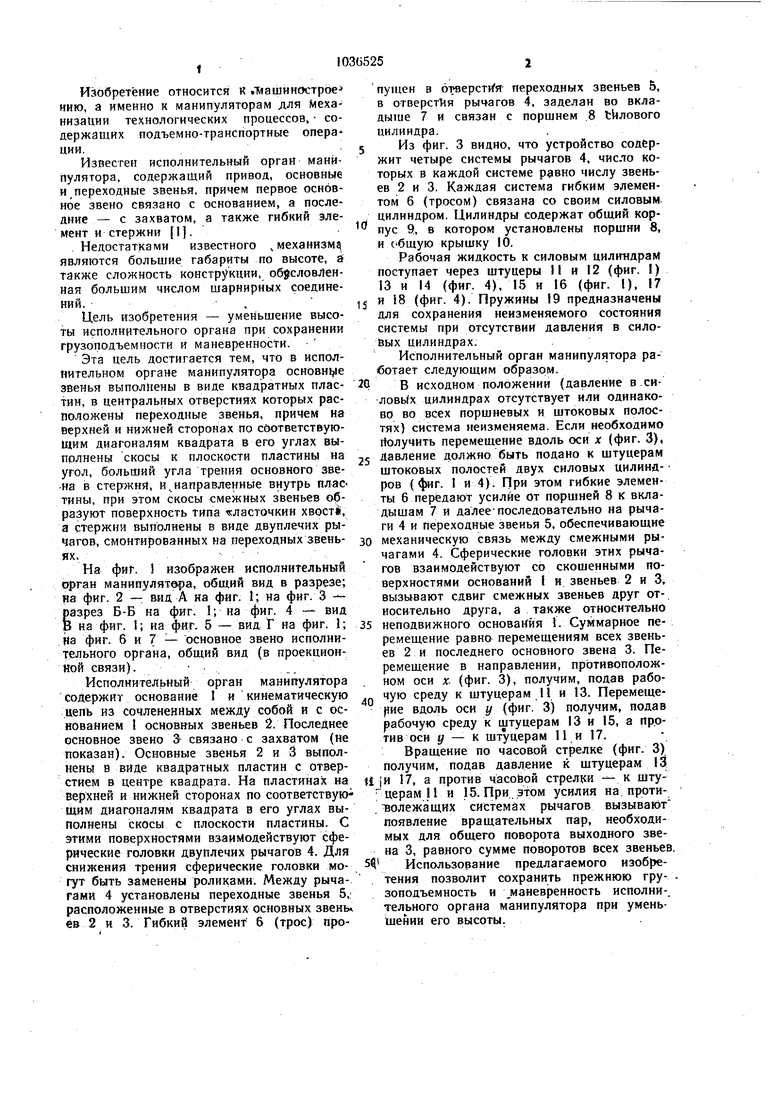
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1981 |
|
SU971641A1 |
| Исполнительный орган манипулятора | 1982 |
|
SU1033306A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU942981A1 |
| Исполнительный орган манипулятора | 1983 |
|
SU1094733A1 |
| Исполнительный орган манипулятора | 1980 |
|
SU884996A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1172696A1 |
| Исполнительный орган манипулятора | 1979 |
|
SU874331A2 |
| Исполнительный орган манипулятора | 1982 |
|
SU1017492A1 |
| Исполнительный орган манипулятора | 1978 |
|
SU766856A1 |
| Исполнительный орган манипулятора | 1984 |
|
SU1192968A1 |
ИСПОЛНИТЕЛЬНЫЙ ОРГАН МАНИПУЛЯТОРА, содержащий привод, основные и переходные звенья, причем пер-вое основное звено соединено с основанием, а последнее - с захватом, а также гибкий элемент и стержни, отличающийся тем, что, с целью уменьшения высоты исполнительного органа при сохранении грузоподъемности и маневренности, основные звенья выполнены в. вн.ае квадратных пластин, в центральных отверстиях которых . расположены переходные звенья, причем на верхней и нижней сторонах по соответствующим диагоналям квадрата в его углах выполнены скосы к .плоскости пластины на угол, больший угла трения основного звена и стержня, и направленные внутрь пластины, при этом скосы смежных звеньев образуют поверхность типа «ласточкин хвост, а стержни выполнены в виде двуплечих рычагов, смонтированных на переходных звеньях. (Л с оо О5 ел к СП
Вид Г
J
фиг б
п
I
:
L
2
фиг. 7
| L Авторское свидетельство СССР, по заявке ЛЬ 3279519/25-08 | |||
| м | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
