(54)
МАНИПУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1984 |
|
SU1194673A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СИНТЕЗА И АНАЛИЗА МАЛЬТИЙСКИХ МЕХАНИЗМОВ | 1971 |
|
SU290854A1 |
| ПРИБОР ДЛЯ ОДНОВРЕМЕННОГО ВЫЧЕРЧИВАНИЯ ГРАФИКОВ ПУТИ ПО ВРЕМЕНИ И СКОРОСТИ ВЕДОМОГО ЗВЕНА ЧЕТЫРЕХЗВЕННЫХ ШАРНИРНЫХ МЕХАНИЗМОВ | 1966 |
|
SU214825A1 |
| Манипулятор | 1986 |
|
SU1328187A1 |
| Манипулятор | 1977 |
|
SU702632A1 |
| Манипулятор | 1981 |
|
SU1002146A2 |
| Манипулятор | 1984 |
|
SU1177149A1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Исполнительный орган манипулятора | 1989 |
|
SU1646845A1 |
| Сцепное устройство сочлененного трактора | 1986 |
|
SU1425098A1 |
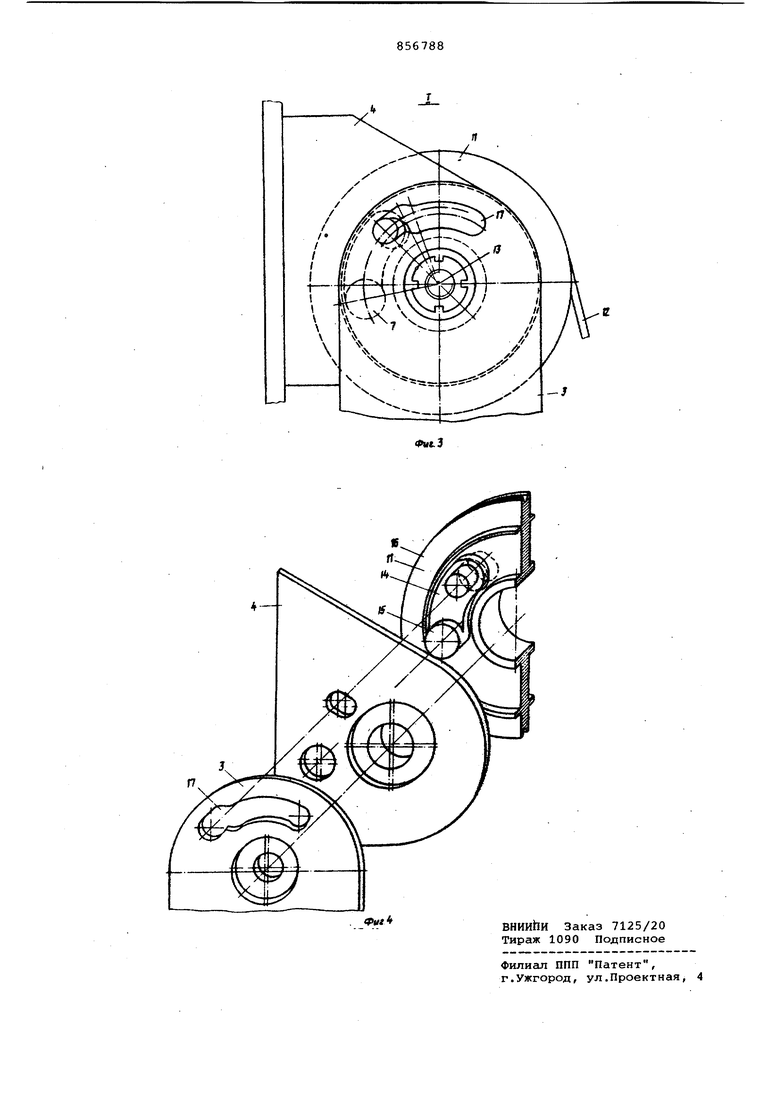
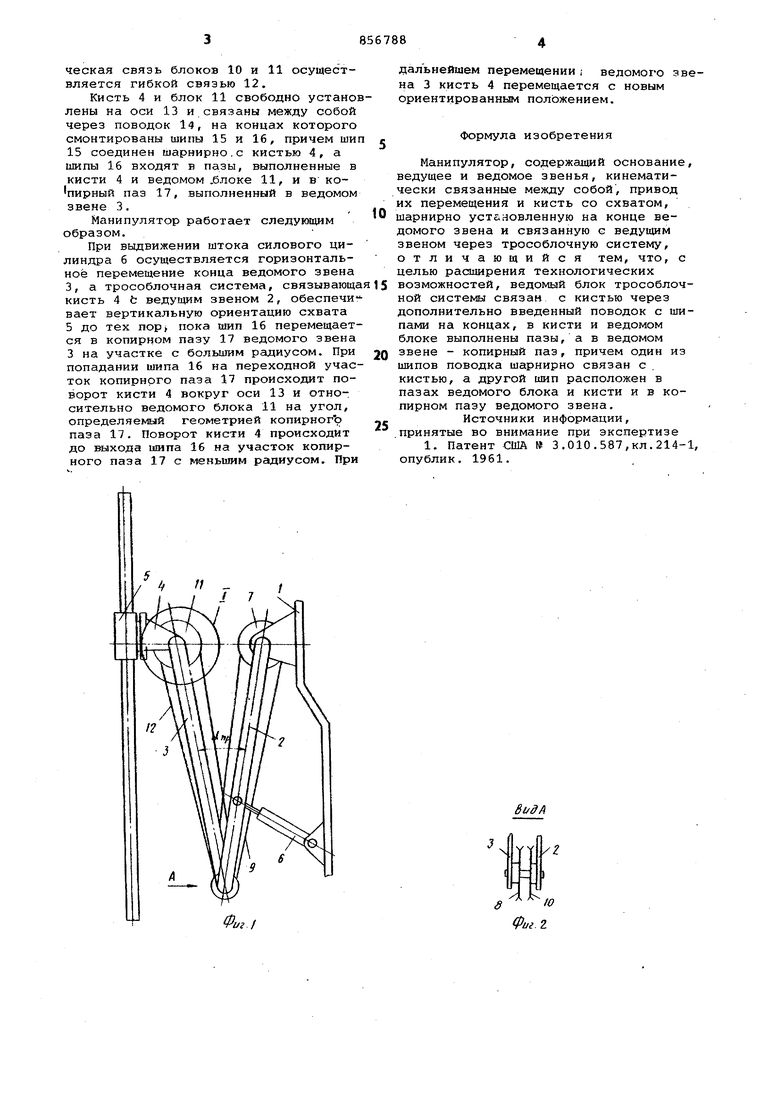
Изобретение относится к машиностроению и может быть использовано в погрузочных манипуляторах. Известен манипулятор, содержащий основание, ведущее и ведомое звенья, кинематически связанные между собой, привод их перемещения и кисть со схватом, йарнирно устс новленную на конце ведомого звена и связанную с ведущим звеном через трособлочную систему fl. Недостатком известного устройства является невозможность изменения ориентации кисти при перемещении звеньев, что существенно снижает тех .нологические возможности манипулятора. - Цель изо(Н етения - расширение тех нологических возможностей манипулято ра. Поставленная цель достигается тем что в устройстве ведомый блок трособлочной системы связан с кистью через д полнительно введенный поводок с шипами на концах, в кисти и ведомом блоке выполнены пазы, а в ведомом звенекопирный паз, причем один из шипов поводка шарнирно связан с кистью, а другой шип расположен в пазах ведомого блока и кисти и в копирном пазу. ведомого звена. На фиг. 1 изображен манипулятор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг. 4 - элемент манипулятора, аксонометрия. Манипулятор содержит основание 1, ведущее звено 2, ведомое звено 3, на конце которого шарнирно установлена кисть 4 с схватом 5. Перемещение ведущего звена 2 осуществляется силовым цилиндром 6. Кинематическая связь ведущего 2 и ведомого 3 звеньев осуществляется с помощью трособлочной системы, содержащей ведущий блок 7, неподвижно прикрепленный к основанию 1, ведомый блок 8, неподвижно прикрепленный к ведомому звену 3, и гибкую связь 9. Кинематическая связь кисти 4 с ведущим звеном 2 осуществляется благодаря трособлочной системе, содержащей ведущий блок 10, неподвижно прикрепленный к ведущему звену 2, ведo яaй блок 11, шарнирно установленный на конце ведомого звена 3, причем диаметр блоков 8 и 10 в два раза меньше диаметра блоков 7 и 11. Кинематическая связь блоков 10 и 11 осуществляется гибкой связью 12. Кисть 4 и блок 11 свободно устано лены на оси 13 и связаны между собой через поводок 14, на концах которого смонтированы шипы 15 и 16, причем ши 15 соединен шарнирно,с кистью 4, а шипы 16 входят в пазы, выполненные в кисти 4 и ведомом .блоке 11, и в копирный паз 17, выполненный в ведомом эвене 3. Манипулятор работает следующим образом. При выдвижении штока силового цилиндра 6 осуществляется горизонтальное перемещение конца ведомого звена 3, а трособлочная система, связывающа кисть 4 fc ведущим звеном 2, обеспечи вает вертикальную ориентацию схвата 5 до тех пор, пока шип 16 перемещается в копирном пазу 17 ведомого звена 3 на участке с большим радиусом. При попадании шипа 16 на переходной участок копирного паза 17 происходит поворот кисти 4 вокруг оси 13 и относительно ведомого блока 11 на угол, определяемый геометрией копирногЪ паза 17. Поворот кисти 4 происходит до выхода шипа 16 на участок копирного паза 17 с меньшим радиусом. При дальнейшем перемещении; ведомого звена 3 кисть 4 перемещается с новым ориентированным положением. Формула изобретения Манипулятор, содержащий основание, ведущее и ведомое звенья, кинематически связанные между собой, привод их перемещения и кисть со схватом, шарнирно установленную на конце ведомого звена и связанную с ведущим звеном через трособлочную систему, отличающийся тем, что, с целью расширения технологических возможностей, ведомый блок трособлочной системы связан с кистью через дополнительно введенный поводок с шипами на концах, в кисти и ведомом блоке выполнены пазы, а в ведомом звене - копирный паз, причем один из шипов поводка шарнирно связан с кистью, а другой шип расположен в пазах ведомого блока и кисти и в копирном пазу ведомого звена. Источники информации, принятые во внимание при экспертизе 1. Патент США 3.010.587,кл. 214-1, опублик. 1961.
/Z
о
Фиг.г
