1
(21)4736038/28
(22)08.09.89
(46) 15.09.91. Бюп. М 34
(71)1-й Государственный подшипниковый завод
(72)1Э.В.Родников и А.А.Оикарев (53) 531.717 (088.8)
(56) Контрольно-измерительные приборы, применяемые в подшипниковом производстве. ВНШШ, вып. 2, М.: Специнформцентр, 1971, с. 139, рис. 225.
(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ТЕЛА ВРАЩЕНИЯ
(57) Изобретение относится к измерительной технике и может быть использовано в подшипниковой промышленности при измерении диаметра, овальности, огранки и других параметров тел вращения. Цель изобретения - повышение точности. Прибор содержит корпус 1, в котором смонтированы две параллельные призмы 2 и упор. Между призмами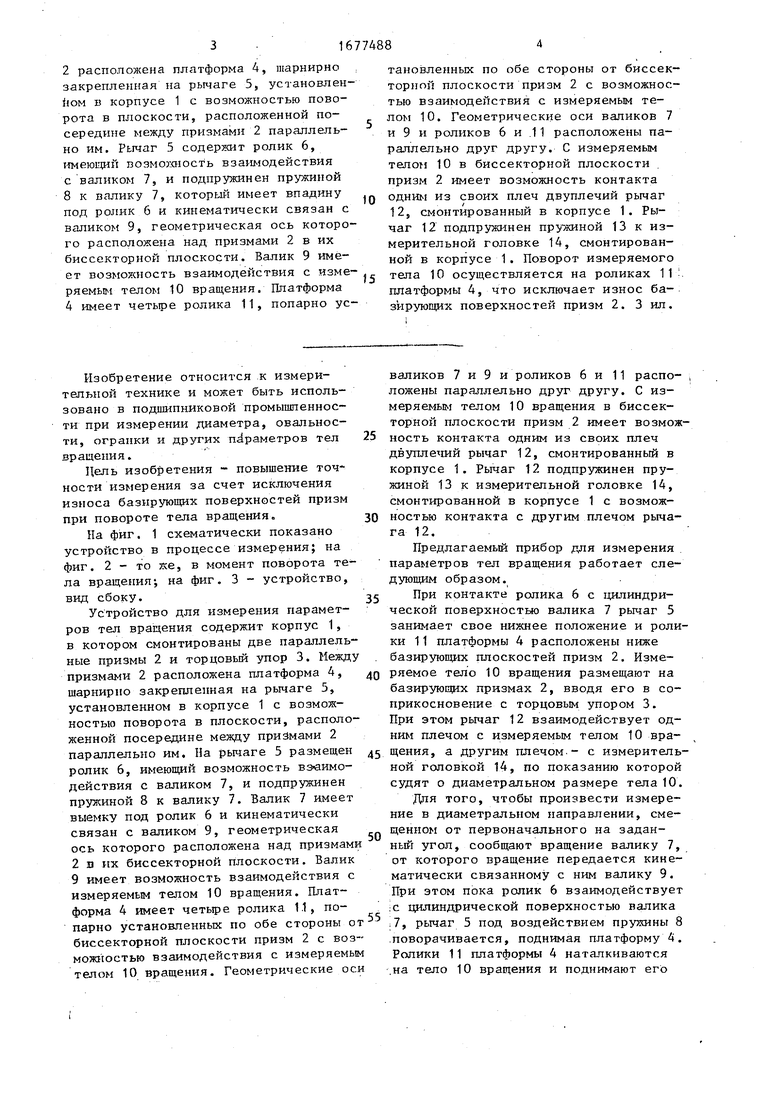
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля шпоночного паза | 1984 |
|
SU1179092A1 |
| Прибор для контроля конусности дорожки качения колец подшипника | 1989 |
|
SU1640524A1 |
| Универсальный прибор для измерения линейных и угловых величин | 1987 |
|
SU1527479A1 |
| Устройство для измерения взаимного расположения поверхностей | 1983 |
|
SU1118848A1 |
| Устройство для подачи детали в зону контроля после шлифования | 1990 |
|
SU1763142A1 |
| Устройство для измерения бочкообразности зубьев зубчатых колес | 1977 |
|
SU648829A1 |
| Устройство для вставки уплотнительных шайб в подшипник | 1987 |
|
SU1481523A1 |
| Устройство для контроля параметров наружной резьбы деталей | 1986 |
|
SU1362910A1 |
| Устройство для контроля шпоночного газа | 1975 |
|
SU611105A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ШПОНОЧНОГО ПАЗА ОТВЕРСТИЯ | 2001 |
|
RU2190187C1 |

8
//
(Л
05 1 J
Јъ
00 00
фиг
3167
2 расположена платформа 4, шарнирно закрепленная на рычаге 5, установлен- iioM в корпусе 1 с возможностью поворота в плоскости, расположенной посередине между призмами 2 параллель- но им. Рычаг 5 содержит ролик 6, имеющий возможность взаимодействия с валиком 7, и подпружинен пружиной 8 к валику 7, который имеет впадину под ролик 6 и кинематически связан с валиком 9, геометрическая ось которого расположена над призмами 2 в их биссекторной плоскости. Валик 9 имеет возможность взаимодействия с чзме- ряемым телом 10 вращения. Платформа 4 имеет четыре ролика 11, попарно ус
Изобретение относится к измерительной технике и может быть использовано в подшипниковой промышленности при измерении диаметра, овальности, огранки и других параметров тел вращения.
Цель изобретения - повышение точности измерения за счет исключения износа базирующих поверхностей призм при повороте тела вращения.
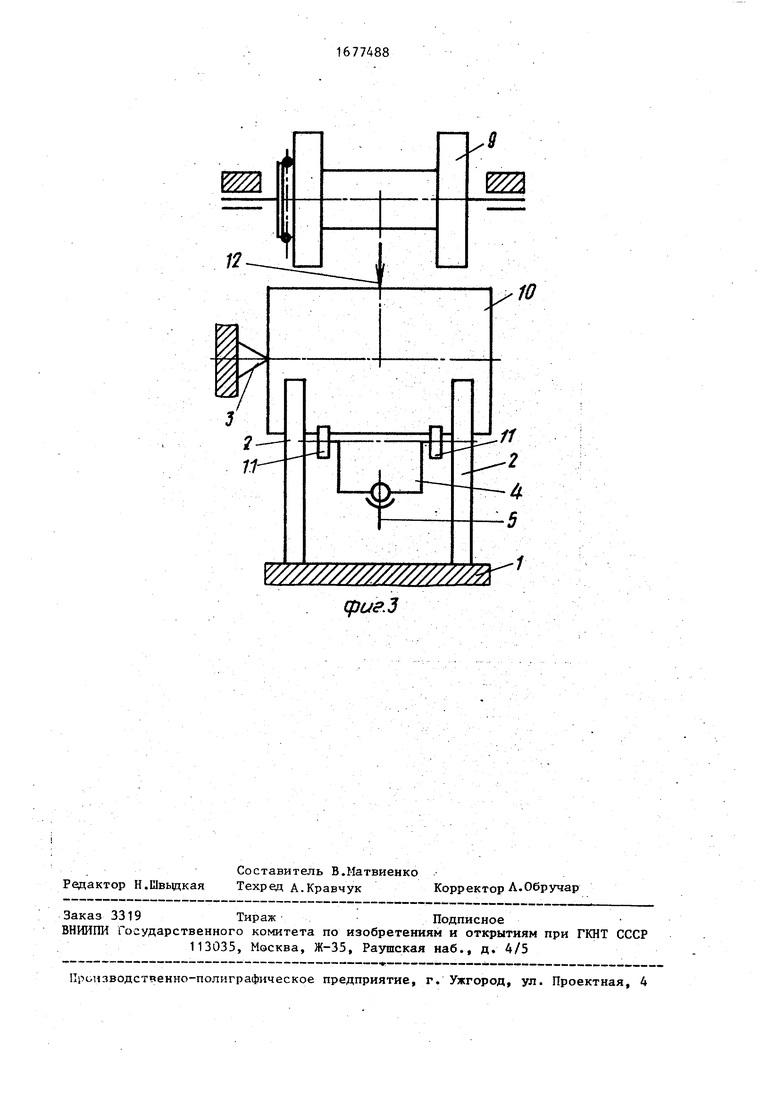
На фиг. 1 схематически показано устройство в процессе измерения; на фиг. 2 - то же, в момент поворота тела вращения4, на фиг. 3 - устройство, вид сбоку.
Устройство для измерения параметров тел вращения содержит корпус 1, в котором смонтированы две параллельные призмы 2 и торцовый упор 3. Между призмами 2 расположена платформа 4, шарнирио закрепленная на рычаге 5, установленном в корпусе 1 с возможностью поворота в плоскости, расположенной посередине между призмами 2 параллельно им. На рычаге 5 размещен ролик 6, имеющий возможность взаимодействия с валиком 7, и подпружинен пружиной 8 к валику 7. Валик 7 имеет выемку под ролик 6 и кинематически связан с валиком 9, геометрическая ось которого расположена над призмами 2 и их биссекторной плоскости. Валик 9 имеет возможность взаимодействия с измеряемым телом 10 вращения. Платформа 4 имеет четыре ролика 11, попарно установленных по обе стороны о биссекторной плоскости призм 2 с возможностью взаимодействия с измеряемы телом 10 вращения. Геометрические ос
тановленных по обе стороны от биссекторной плоскости призм 2 с возможностью взаимодействия с измеряемым телом 10. Геометрические оси валиков 7 и 9 и роликов 6 и 11 расположены параллельно друг другу. С измеряемым телом 10 в биссекторной плоскости призм 2 имеет возможность контакта одним из своих плеч двуплечий рычаг 12, смонтированный в корпусе 1. Рычаг 12 подпружинен пружиной 13 к измерительной головке 14, смонтированной в корпусе 1. Поворот измеряемого тела 10 осуществляется на роликах 11 платформы 4, что исключает износ базирующих поверхностей призм 2. 3 ил.
5
0
5
0
5
0
валиков 7 и 9 и роликов 6 и 11 расположены параллельно друг другу. С измеряемым телом 10 вращения в биссек- торной плоскости призм 2 имеет возможность контакта одним из своих плеч двуплечий рычаг 12, смонтированный в корпусе 1. Рычаг 12 подпружинен пружиной 13 к измерительной головке 14, смонтированной в корпусе 1 с возможностью контакта с другим плечом рычага 12.
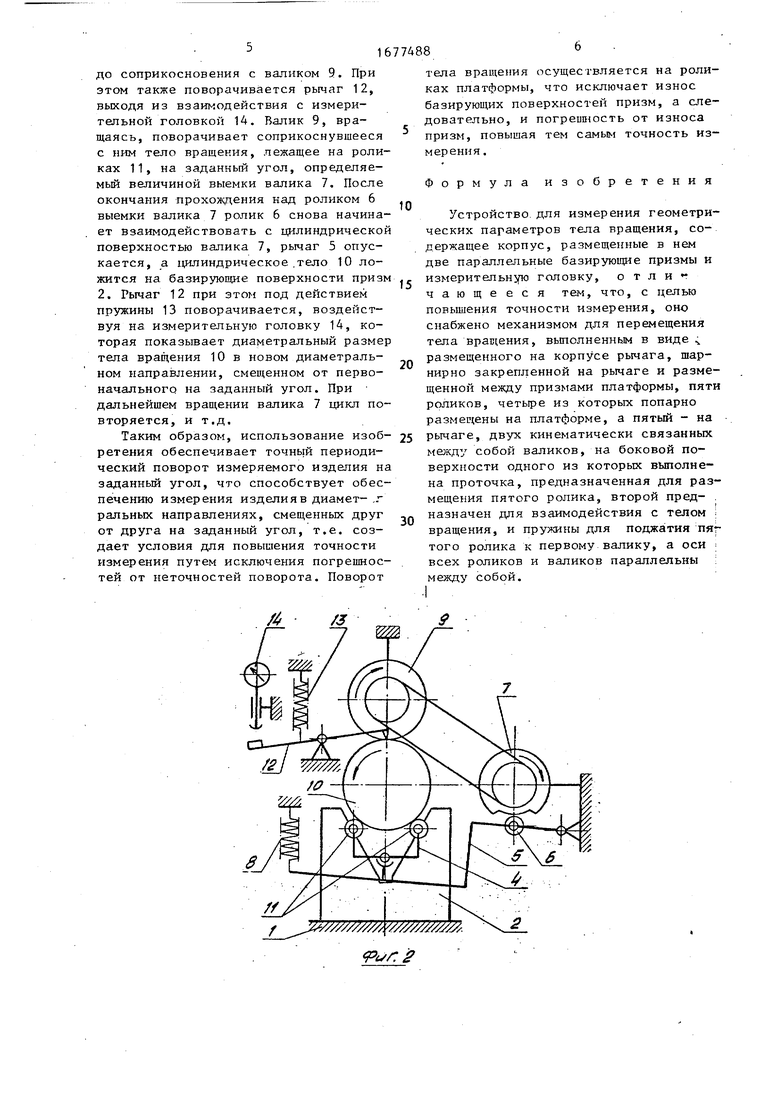
Предлагаемый прибор для измерения параметров тел вращения работает следующим образом.
При контакте ролика 6 с цилиндрической поверхностно валика 7 рычаг 5 занимает свое нижнее положение и ролики 11 платформы 4 расположены ниже базирующих плоскостей призм 2. Измеряемое тело 10 вращения размещают на базирующих призмах 2, вводя его в соприкосновение с торцовым упором 3. При этом рычаг 12 взаимодействует одним плечом с измеряемым телом 10 вращения, а другим плечом - с измерительной головкой 14, по показанию которой судят о диаметральном размере тела 10.
Для того, чтобы произвести измерение в диаметральном направлении, смещенном от первоначального на заданный угол, сообщают вращение валику 7, от которого вращение передается кинематически связанному с ним валику 9. При этом пока ролик 6 взаимодействует с цилиндрической поверхностью валика 7, рычаг 5 под воздействием пружины 8 поворачивается, поднимая платформу 4. Ролики 11 платформы 4 наталкиваются на тело 10 вращения и поднимают его
до соприкосновения с валиком 9. При этом также поворачивается рычаг 12, выходя из взаимодействия с измерительной головкой 14. Валик 9, вращаясь, поворачивает соприкоснувшееся с ним тело вращения, нежащее на роликах 11, на заданный угол, определяемый величиной выемки валика 7, После окончания прохождения над роликом 6 выемкк валика 7 ролик 6 снова начинает взаимодействовать с цилиндрической поверхностью валика 7, рычаг 5 опускается, а цилиндрическое тело 10 ложится на базирующие поверхности призм 2. Рычаг 12 при этом под действием пружины 13 поворачивается, воздействуя на измерительную головку 14, которая показывает диаметральный размер тела вращения 10 в новом диаметральном направлении, смещенном от первоначального на заданный угол. При дальнейшем вращении валика 7 цикл повторяется, и т.д.
Таким образом, использование изоб- ретения обеспечивает точный периодический поворот измеряемого изделия на заданный угол, что способствует обеспечению измерения изделия в диамет- г ральных направлениях, смещенных друг от друга на заданный угол, т.е. создает условия для повышения точности измерения путем исключения погрешностей от неточностей поворота. Поворот
/J
(///У/////
. 2
0
5
5
0
0
тела вращения осуществляется на роликах платформы, что исключает износ базирующих поверхностей призм, а следовательно, и погрешность от износа призм, повышая тем самым точность измерения.
Формула изобретения
Устройство для измерения геометрических параметров тела вращения, содержащее корпус, размещенные в нем две параллельные базирующие призмы и измерительную головку, о т л и чающееся тем, что, с целью повышения точности измерения, оно снабжено механизмом для перемещения тела вращения, выполненным в виде ч размещенного на корпусе рычага, шар- нирно закрепленной на рычаге и размещенной между призмами платформы, пяти роликов, четыре из которых попарно размещены на платформе, а пятый - на рычаге, двух кинематически связанных между собой валиков, на боковой поверхности одного из которых выполнена проточка, предназначенная для размещения пятого ролика, второй предназначен для взаимодействия с телом вращения, и пружины для поджатия пятого ролика к первому валику, а оси всех роликов и валиков параллельны между собой.
фие. 3
