Изобретение относится к транспортировке грузов ленточными конвейерами и может быть использовано в горно-добывающей промышленности и промышленности строительных материалов.
Целью изобретения является повышение надежности и производительности работы приводной станции с вакуум-барабаном.
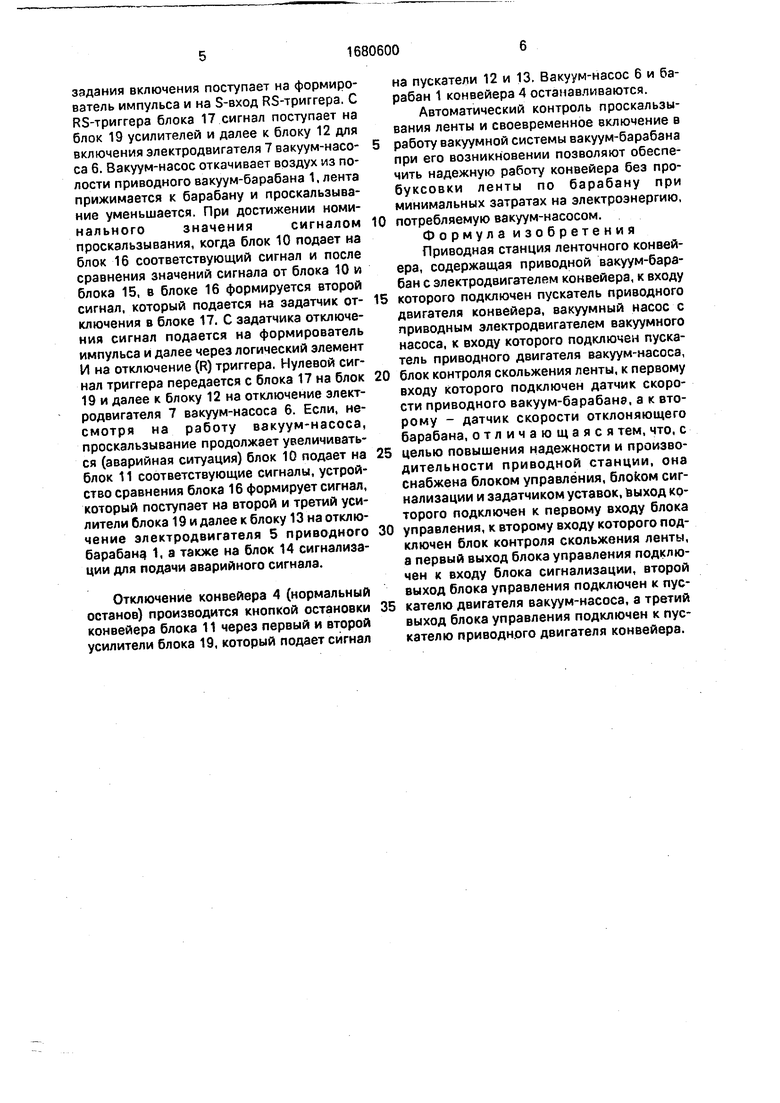
На фиг.1 изображена приводная станция конвейера со структурно-модульной схемой управления ее механизмами, общий вид; на фиг.2 - структурно-модульная схема управляющего устройства.
Приводная станция состоит из приводного вакуум-барабана 1, отклоняющего барабана 2 и разгрузочного барабана 3, охваченных конвейерной лентой 4. Вакуум- барабан 1 кинематически связан с электродвигателем 5 конвейера, его вакуумная система сообщена с вакуум-насосом 6, имеющим приводной электродвигатель 7. Вакуум-барабан 1 и отклоняющий барабан 2 снабжены датчиками 8 и 9 скорости, которые присоединены к блоку 10 контроля про- скальзывания ленты по приводному барабану. Блок 10 соединен с блоком 11 управления, три выхода которого подключены к пускателю 12 электродвигателя 7 вакуум-насоса 6, пускателю 13 приводного электродвигателя 5 и к блоку 14 сигнализации. К блоку 11 управления подключен задатчик 15 уставокуровней проскальзывания ленты по приводному барабану. Блок 11 состоит из блока 16 сравнения, к которому присоединены выходы блока 10 контроля проскальзывания ленты и задатчика 15, блока 17 управления вакуум-насосом, к входу которого присоединены выходы блока 16, блок 18, блока 19 усилителей, к первому входу которого присоединены выходы блоков 17 и 16. Выходы блока 19 присоединены к пускателю 12 электродвигателя вауум-на- соса, пускателю 13 приводного электродвигателя конвейера и к блоку 14 сигнализации.
Приводная станция работает следующим образом.
Для пуска конвейера нажимают кнопку пуска конвейера в блоке 11. С выхода блоков 16 и 17 сигнал поступает на блок 19 усилителей, на третий усилитель. Усиленный сигнал с третьего усилителя блока поступает к блоку 14 сигнализации, обеспечивающему предупредительный сигнал о пуске конвейера. Одновременно сигнал с блока 17 поступает на первый усилитель блока 19 и с выхода этого блока на пускатель 12 электродвигателя вакуум- насоса. После окончания заданной выдерж5 ки времени для предупредительной сигнализации (2-8 с) и достижения вакуум- насосом необходимого вакуума (3-10 с) по- .дается сигнал на второй усилитель блока 19 и последний включает пускатель 13 электро0 двигателя привода конвейера. После достижения лентой конвейера номинальной скорости сигнал от датчиков 8 и 9 скорости поступает через блок 10 контроля проскальзывания на блок 11. По этому сигналу пер5 вый усилитель блока 19 усилителей отключает пускатель 12 электродвигателя вакуум-насоса.
В случае, если проскальзывание ленты превысит заданное заранее (в зависимости
0 от загрузки конвейера) задатчиком 15 значение, т.е. разность скоростей вращения отклоняющего барабана 2 и приводного вакуум-барабана 1 будет выше заданной, блок 10 контроля проскальзывания ленты
5 подает сигнал на блок 11. На задатчике 15 устанавливаются три различных значения проскальзывания, соответствующие нормальному проскальзыванию, повышенному проскальзыванию и аварийному проскаль0 зыванию. Если проскальзывание достигло повышенного значения, то сигнал, поступающий на блок 11, поступает на блок 16 сравнения, где формируется первый сигнал и подается на блок 17 управления вакуум-на- - сосом на задание включения. Устройство
задания включения поступает на формирователь импульса и на S-вход RS-триггера. С RS-триггера блока 17 сигнал поступает на блок 19 усилителей и далее к блоку 12 для включения электродвигателя 7 вакуум-насоса 6. Вакуум-насос откачивает воздух из полости приводного вакуум-барабана 1, лента прижимается к барабану и проскальзывание уменьшается. При достижении номинального значения сигналом проскальзывания, когда блок 10 подает на блок 16 соответствующий сигнал и после сравнения значений сигнала от блока 10 и блока 15, в блоке 16 формируется второй сигнал, который подается на задатчик отключения в блоке 17. С задатчика отключения сигнал подается на формирователь импульса и далее через логический элемент И на отключение (R) триггера. Нулевой сигнал триггера передается с блока 17 на блок 19 и далее к блоку 12 на отключение электродвигателя 7 вакуум-насоса 6. Если, несмотря на работу вакуум-насоса, проскальзывание продолжает увеличиваться (аварийная ситуация) блок 10 подает на блок 11 соответствующие сигналы, устройство сравнения блока 16 формирует сигнал, который поступает на второй и третий усилители блока 19 и далее к блоку 13 на отключение электродвигателя 5 приводного барабанё| 1, а также на блок 14 сигнализации для подачи аварийного сигнала.
Отключение конвейера 4 (нормальный останов) производится кнопкой остановки конвейера блока 11 через первый и второй усилители блока 19, который подает сигнал
на пускатели 12 и 13. Вакуум-насос 6 и барабан 1 конвейера 4 останавливаются.
Автоматический контроль проскальзывания ленты и своевременное включение в
работу вакуумной системы вакуум-барабана при его возникновении позволяют обеспечить надежную работу конвейера без пробуксовки ленты по барабану при минимальных затратах на электроэнергию,
потребляемую вакуум-насосом.
Формула изобретения Приводная станция ленточного конвейера, содержащая приводной вакуум-барабан с электродвигателем конвейера, к входу
которого подключен пускатель приводного двигателя конвейера, вакуумный насос с приводным электродвигателем вакуумного насоса, к входу которого подключен пускатель приводного двигателя вакуум-насоса,
блок контроля скольжения ленты, к первому входу которого подключен датчик скорости приводного вакуум-барабана, а к второму - датчик скорости отклоняющего барабана, отличающаяся тем, что, с
целью повышения надежности и производительности приводной станции, она снабжена блоком управления, блоком сигнализации и задатчиком уставок, выход которого подключен к первому входу блока
управления, к второму входу которого подключен блок контроля скольжения ленты, а первый выход блока управления подключен к входу блока сигнализации, второй выход блока управления подключен к пускателю двигателя вакуум-насоса, а третий выход блока управления подключен к пускателю приводного двигателя конвейера.
6СР
-{
Ц -
1
w г г
В
Сравнение Значений
v
Формирование сигналов
«ШИПИ.-т
5УЯ
рш-rt ±Z±J
./2
ЗПЭДП поъ. /3
К6СМ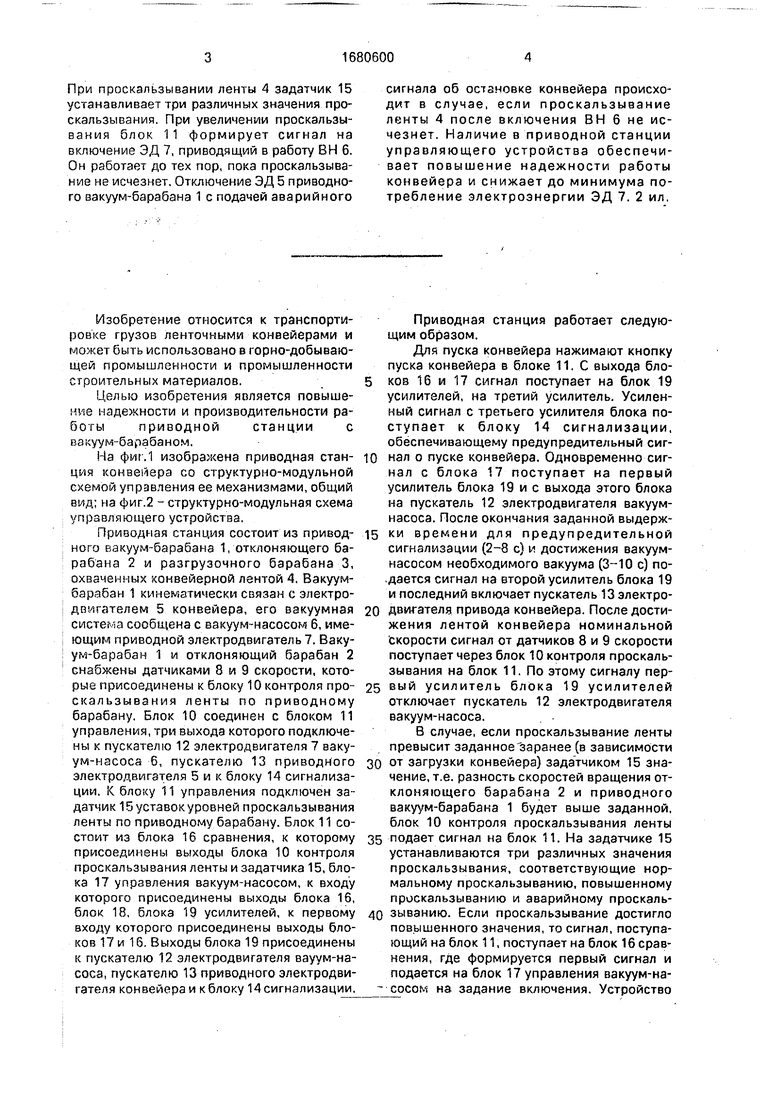
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом конвейера | 1985 |
|
SU1320137A1 |
| Устройство для отключения электродвигателя конвейера | 1988 |
|
SU1646959A1 |
| Способ защиты ленточного конвейера от аварийного буксования | 1989 |
|
SU1779659A1 |
| Промежуточный вакуум-привод ленточного конвейера | 1986 |
|
SU1426897A1 |
| ТЕМПЕРАТУРНОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОБУКСОВКИ ЛЕНТЫ НА ПРИВОДНОМ БАРАБАНЕ КОНВЕЙЕРА | 2002 |
|
RU2209758C1 |
| ТЕМПЕРАТУРНОЕ УСТРОЙСТВО КОНТРОЛЯ ПРОБУКСОВКИ ЛЕНТЫ НА ПРИВОДНОМ БАРАБАНЕ КОНВЕЙЕРА | 2004 |
|
RU2268220C1 |
| Способ управления двухбарабанным ленточным конвейером | 1984 |
|
SU1286474A1 |
| Устройство для запуска конвейера | 1990 |
|
SU1708716A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЛЕНТОЧНОГО КОНВЕЙЕРА | 1992 |
|
RU2010760C1 |
| Устройство для управления шнекороторным экскаватором | 1988 |
|
SU1629417A1 |
Изобретение относится к конвейерному транспорту, а именно к ленточным конвейерам, используемым в горно-добывающей промышленности и промышленности стройматериалов. Цель изобретения - повышение надежности и производительности приводных станций ленточных конвейеров, оснащенных вакуум-барабанами. Приводная станция содержит приводной вакуум- барабан 1 с электродвигателем (ЭД) 5 конвейера, вакуум-насос (ВН) 6 с приводным ЭД 7, пускатели ЭД, блок 10 контроля скольжения ленты 4 и датчики 8, 9 скорости вакуум-барабана и отклоняющего барабана 2. Дополнительно устройство снабжено блоком 11 управления, блоком 14 сигнализации и задатчиком 15 уставок. При пуске конвейера блок 11 формирует сигнал на включение ЭД 7 с выдержкой времени ЭД 7. Если пуск прошел нормально в блоке 11 формируется сигнал на отключение ВН 6.
Фиг. 2.
| Кузнецов Б | |||
| А | |||
| и др | |||
| Транспорт на горных предприятиях | |||
| М.: Недра, 1976, с.72 и 92 | |||
| Приводная станция ленточного конвейера | 1976 |
|
SU581030A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
