мы механизма поворота и вертикального перемещения блока подготовки радиоэлементов с механизмом подготовки- узла паяльников; на фиг.8 и 9 - схемы координатного стола с механизмом компенсации, позиционирования и магнитной фиксации носителя печатной платы; на фиг.10 и 11 - схемы блоков подготовки радиоэлементов с устройством точного позиционирования, пространственной ориентации, тепловой и электростатической защиты, механизма выбора и выгрузки радиоэлементов с устройством предварительного позиционирования и ориентации.
Система установки и пайки радиоэлементов на печатной палате (фиг.1) состоит из блока 1 управления, имеющего двадцать шесть выходов и тринадцать входов, механизма 2 перемещения координатного стола (МПКС), механизма 3 вертикального перемещения блока подготовки радиоэлементов (МВПР), механизма 4 поворота блока подготовки радиоэлементов (МПР), на котором жестко установлен механизм 5 подготовки узла паяльников (МПУП), механизма 6 вертикального перемещения узла паяльников (MBПУП), на котором установлен механизм 7 дозирования усилия прижатия (МДУП), механизма 8 выгрузки радиоэлементов (МБР) 8, блока 9 подготовки радиоэлементов (БПР), механизма 10 дозирования подачи припоя (МДПП), устройства 11 контроля температуры пайки (УКТП), термопары 12, установленной на жале паяльника, устройства 13 блокировки, механизма 14 выбора (MB) и регулируемое суппорта с устройством 15 визуального контроля.
Все механизмы являются независимыми. МПКС 2. МВПР 3, МПР 4, МВПУП 6, MB 14 и ИВР 8 представляют собой регулируемый электромеханический привод, состо- ящий из блока управления (БУ) и исполнительного механизма. В качестве выходов исполнительных механизмов может быть сигнал с концевого выключателя (включателя), фотодиода и т.д. В состав МПКС 2, кроме того, входит устройство ввода (УВ). В качестве УВ может быть использован, например, выпускаемый промышленностью перфоратор ПЛ-150 М (или любое другое устройство считывания с перфокарт или перфолент). В качестве устройства 15 визуального контроля может быть использована выпускаемая промышленностью оптическая система СТЗ-1 с 20-50-кратным увеличением или лупа с 2-кратным увеличением. МДУП 7 выполнен в виде подпружиненного узла, на котором установлено жало паяльника. Величина усилия прижатия регулируется изменением предварительного сжатия пружины. МВР 8 может быть выполнен, например, в виде кривошипно-шатунного механизма с ползуном, который выталкивает из кассеты установленные в определенном порядке радиоэлементы, или в виде толкателя, приводимого в движение с помощью кулачкового механизма.
МВР 8 может быть выполнен, например, в виде спаренных кулачков 16 и 17, толкате0 ля 18, толкателя с планками 19, подпружиненного пружиной 20, соединенных в вертикальном направлении через пружины 21 с неподвижным подшипником 22 скольжения с упором. Причем вал с кулачками 16
5 и 17 связан с приводом, обеспечивающим вращение кулачков.
Механизм 14 выбора представляет собой подвижную стойку 23, связанную с приводом, обеспечивающим поступательное
0 движение вдоль оси Y, На подвижной стойке 23 с помощью плоских пружин 24 установлена кассета 25, имеющая пазы для установки радиоэлементов 26 и для ее вертикального перемещения с помощью пла5 нок толкателя 19 в подвижной стойке 23. На неподвижном основании, напротив устройства 27 предварительного позиционирования и ориентации установлен датчик 28, ответные части которого расположены на
0 подвижной стойке 23 над кассетами с радиоэлементами 25. В каждой кассете установлены различные радиоэлементы. Датчик 28 связан с блоком 1 управления. Датчик 28 может быть выполнен в виде
5 набора переключателей, фотодиодов и т.д. Под устройством 27 предварительного по- зиционироваания, выполненного в виде направляющих, установлен датчик наличия радиоэлементов на позиции схвата, связан0 ный с устройством 13 блокировки и блоком 1 управления.
УКТП 11 представляет собой совокупность измерителя температуры (1/1Т), имеющего подвижный контакт, и контактной
5 группы (КГ), которая может быть выполнена в виде концевых включателей (или выключателей). ИТ связан с термопарой 12, которая установлена на жале узла паяльников. В качестве ИТ с КГ может быть использоQ ван выпускаемый промышленностью электроизмерительный контактный прибор МЗЗЗКА, имеющий измерительную стрелку с подвижным контактом и две управляющие стрелки с неподвижными контактами. В
е УКТП 11 вместе КГ можно использовать компараторы, опорное напряжение которых устанавливается в соответствии с заданными температурами (эквивалентно положению неподвижных контактов управляющих стрелок).
Устройство 13 блокировки может быть выполнено в виде набора реле или компараторов. МВПУП 6 представляет собой элект- ромеханический привод с зубчатой реечной (червячной) передачей. МДПП 10 представлен на фиг.4 и состоит из электромагнита 29 с регулируемым штоком 30, катушки 31 с припоем, ползуна 32 с подпружиненным кулачками 33 и узла 34 направления припоя , представляющего собой жесткую трубку с требуемой формой.
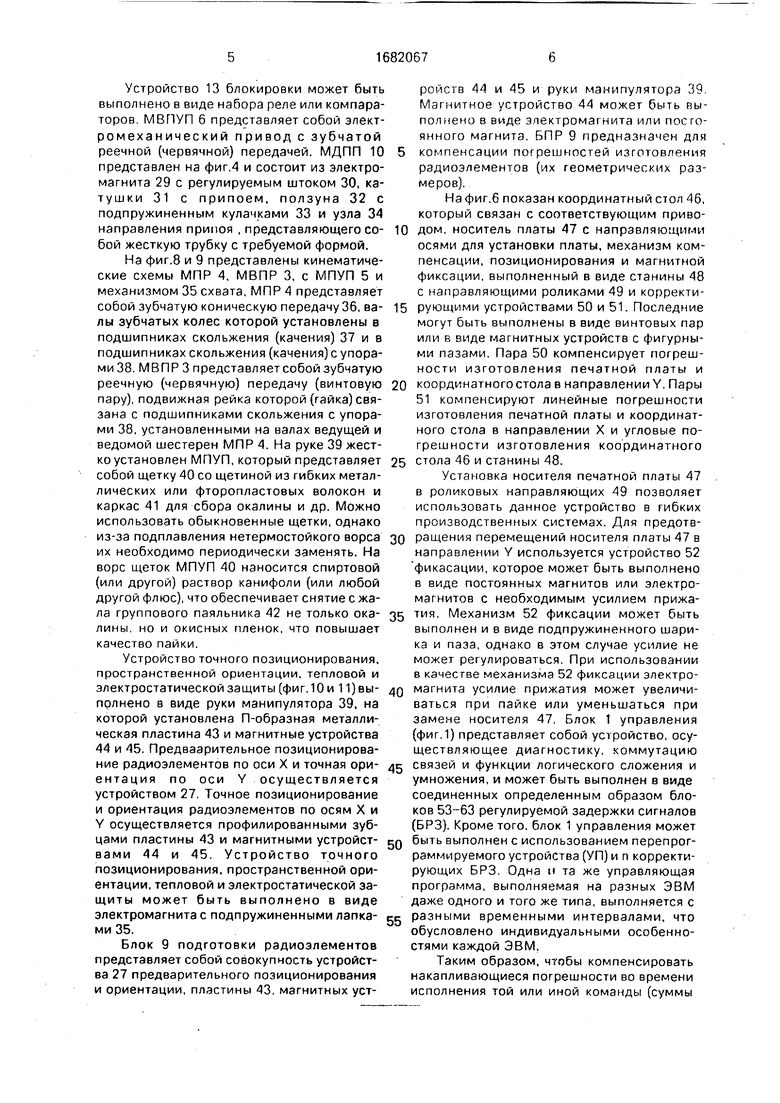
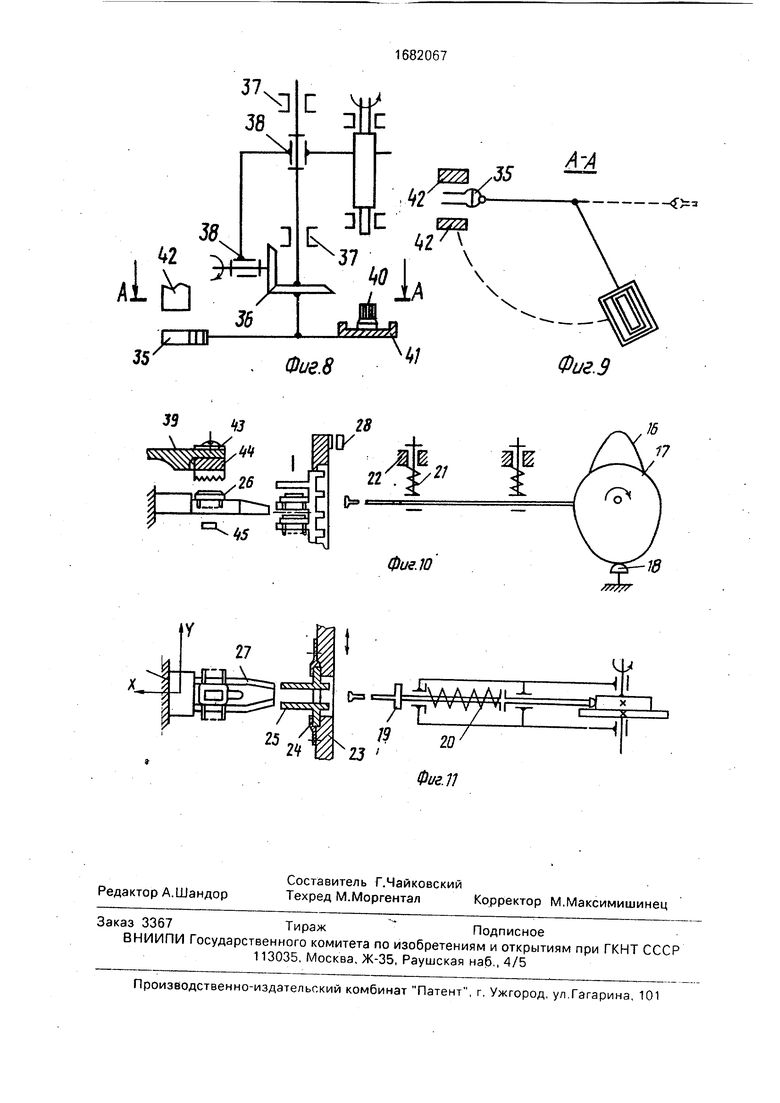
На фиг.8 и 9 представлены кинематические схемы МПР 4, МВПР 3, с МПУП 5 и механизмом 35 схвата, МПР 4 представляет собой зубчатую коническую передачу 36, валы зубчатых колес которой установлены в подшипниках скольжения (качения) 37 и в подшипниках скольжения (качения) с упорами 38. МВПР 3 представляет собой зубчатую реечную (червячную) передачу (винтовую пару), подвижная рейка которой (гайка) связана с подшипниками скольжения с упорами 38, установленными на валах ведущей и ведомой шестерен МПР 4. На руке 39 жестко установлен МПУП, который представляет собой щетку 40 со щетиной из гибких металлических или фторопластовых волокон и каркас 41 для сбора окалины и др. Можно использовать обыкновенные щетки, однако из-за подплавления нетермостойкого ворса их необходимо периодически заменять. На ворс щеток МПУП 40 наносится спиртовой (или другой) раствор канифоли (или любой другой флюс), что обеспечивает снятие с жала группового паяльника 42 не только окалины, но и окисных пленок, что повышает качество пайки.
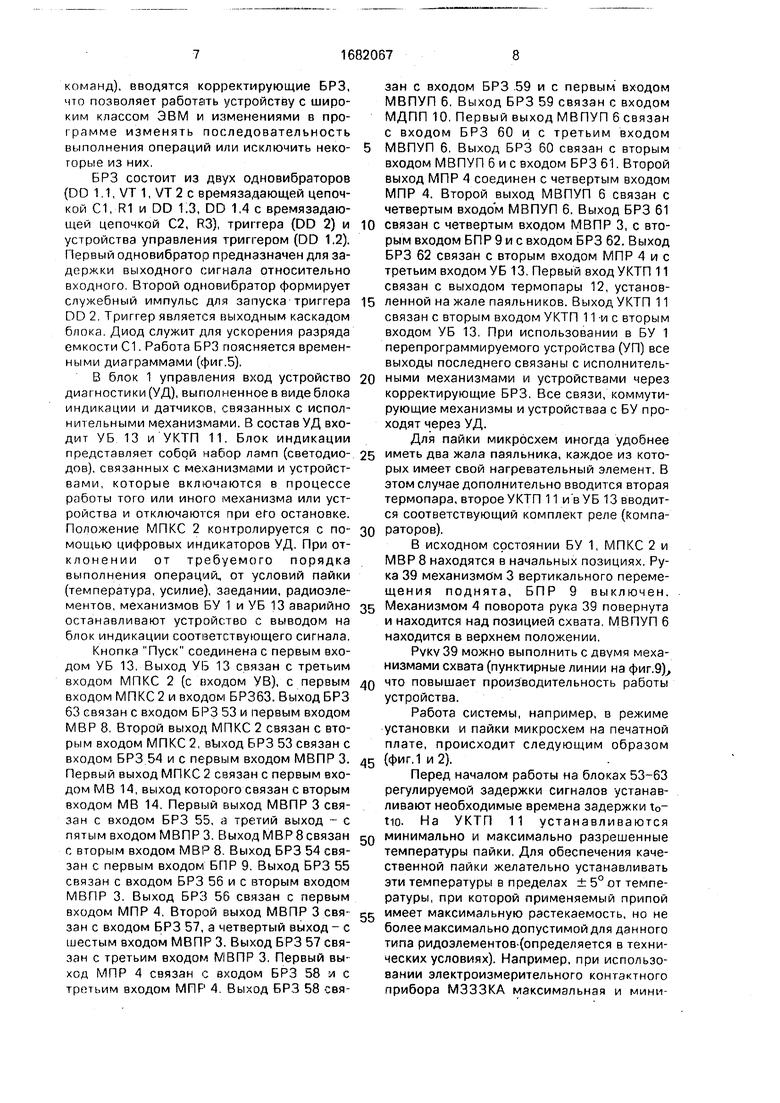
Устройство точного позиционирования, пространственной ориентации, тепловой и электростатической защиты (фиг. 10 и 1 выполнено в виде руки манипулятора 39, на которой установлена П-образная металлическая пластина 43 и магнитные устройства 44 и 45. Предваарительное позиционирование радиоэлементов по оси X и точная ори- ентация по оси Y осуществляется устройством 27. Точное позиционирование и ориентация радиоэлементов по осям X и Y осуществляется профилированными зубцами пластины 43 и магнитными устройствами 44 и 45. Устройство точного позиционирования, пространственной ориентации, тепловой и электростатической защиты может быть выполнено в виде электромагнита с подпружиненными лапками 35.
Блок 9 подготовки радиоэлементов представляет собой совокупность устройства 27 предварительного позиционирования и ориентации, пластины 43, магнитных устройств 44 и 45 и руки манипулятора 39 Магнитное устройство 44 может быть выполнено в виде эпектрома нита или постоянного магнита. БПР 9 предназначен для 5 компенсации погрешностей изготовления радиоэлементов (их геометрических размеров).
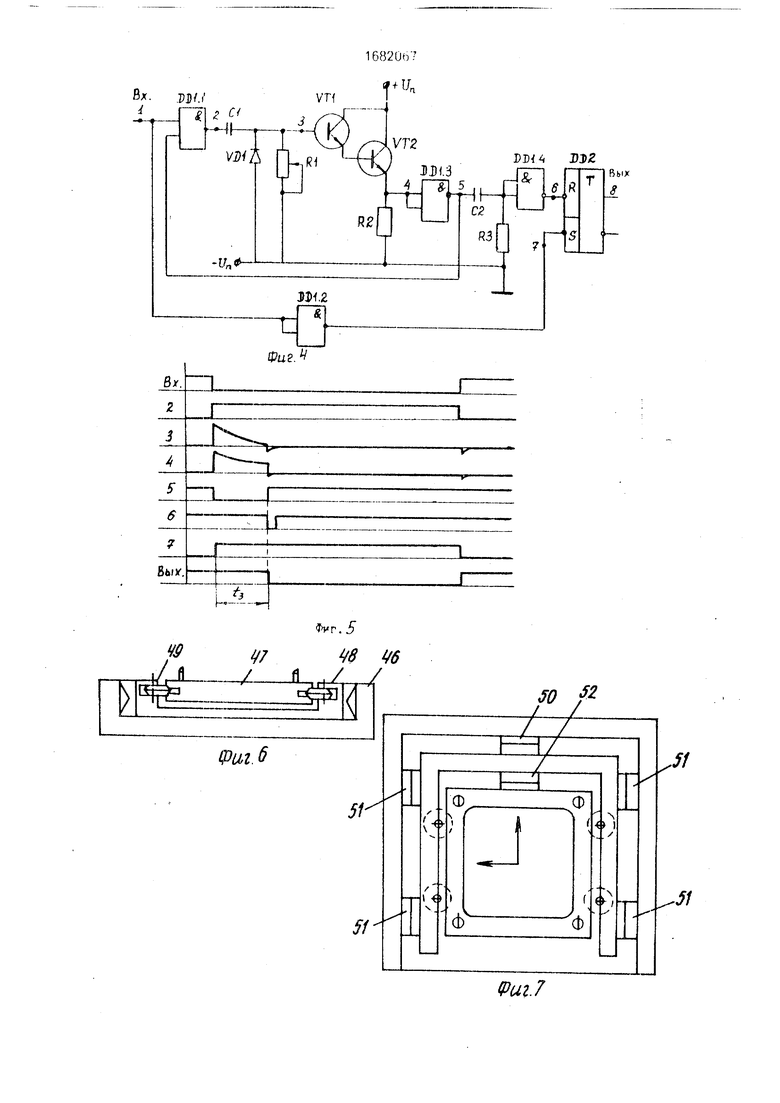
На фиг.6 показан координатный стол 46, который связан с соответствующим приво- 0 дом, носитель платы 47 с направляющими осями для установки платы, механизм компенсации, позиционирования и магнитной фиксации, выполненный в виде станины 48 с направляющими роликами 49 и корректи- 5 рующими устройствами 50 и 51. Последние могут быть выполнены в виде винтовых пар или в виде магнитных устройств с фигурными пазами. Пара 50 компенсирует погрешности изготовления печатной платы и 0 координатного стола в направлении Y. Пары 51 компенсируют линейные погрешности изготовления печатной платы и координатного стола в направлении X и угловые погрешности изготовления координатного 5 стола 46 и станины 48.
Установка носителя печатной платы 47 в роликовых направляющих 49 позволяет использовать данное устройство в гибких производственных системах. Для предотв- 0 ращения перемещений носителя платы 47 в направлении Y используется устройство 52 фикасации, которое может быть выполнено в виде постоянных магнитов или электромагнитов с необходимым усилием прижа- 5 тия. Механизм 52 фиксации может быть выполнен и в виде подпружиненного шарика и паза, однако в этом случае усилие не может регулироваться. При использовании в качестве механизма 52 фиксации электро- Q магнита усилие прижатия может увеличиваться при пайке или уменьшаться при замене носителя 47. Блок 1 управления (фиг.1) представляет собой устройство, осуществляющее диагностику, коммутацию 5 связей и функции логического сложения и умножения, и может быть выполнен в виде соединенных определенным образом блоков 53-63 регулируемой задержки сигналов (БРЗ). Кроме того, блок 1 управления может 0 быть выполнен с использованием перепрограммируемого устройства (УП)и п корректирующих БРЗ. Одна и та же управляющая программа, выполняемая на разных ЭВМ даже одного и того же типа, выполняется с 5 разными временными интервалами, что обусловлено индивидуальными особенностями каждой ЭВМ.
Таким образом, чтобы компенсировать накапливающиеся погрешности во времени исполнения той или иной команды (суммы
команд), вводятся корректирующие БРЗ, что позволяет работать устройству с широким классом ЭВМ и изменениями в про- (рамме изменять последовательность выполнения операций или исключить некоторые из них.
БРЗ состоит из двух одновибраторов (DD 1 1, VT 1, VT 2 с времязадающей цепочкой С1, R1 и DD 1.3, DD 1.4 с времязадающей цепочкой С2, R3), триггера (DD 2) и устройства управления триггером (DD 1.2). Первый одновибратор предназначен для задержки выходного сигнала относительно входного. Второй одновибратор формирует служебный импульс для запуска триггера DD 2 Триггер является выходным каскадом блока. Диод служит для ускорения разряда емкости С1. Работа БРЗ поясняется временными диаграммами (фиг.5).
В блок 1 управления вход устройство диагностики (УД), выполненное в виде блока индикации и датчиков, связанных с исполнительными механизмами. В состав УД входит УБ 13 и УКТП 11. Блок индикации представляет собой набор ламп (светодио- дов), связанных с механизмами и устройствами, которые включаются в процессе работы того или иного механизма или устройства и отключаются при его остановке. Положение МПКС 2 контролируется с помощью цифровых индикаторов УД. При отклонении от требуемого порядка выполнения операций, от условий пайки (температура, усилие), заедании, радиоэлементов, механизмов БУ 1 и УБ 13 аварийно останавливают устройство с выводом на блок индикации соответствующего сигнала.
Кнопка Пуск соединена с первым входом УБ 13. Выход УБ 13 связан с третьим входом МПКС 2 (с входом УВ), с первым входом МПКС 2 и входом БР363. Выход БРЗ 63 связан с входом БРЗ 53 и первым входом МБР 8. Второй выход МПКС 2 связан с вторым входом МПКС 2, выход БРЗ 53 связан с входом БРЗ 54 и с первым входом МВПР 3. Первый выход МПКС 2 связан с первым входом MB 14, выход которого связан с вторым входом MB 14. Первый выход МВПР 3 связан с входом БРЗ 55, а третий выход - с пятым входом МВПР 3. Выход МБР 8 связан с вторым входом МБР 8. Выход БРЗ 54 связан с первым входом БПР 9. Выход БРЗ 55 связан с входом БРЗ 56 и с вторым входом МВПР 3. Выход БРЗ 56 связан с первым входом МПР 4. Второй выход МВПР 3 связан с входом БРЗ 57, а четвертый выход - с шестым входом МВПР 3. Выход БРЗ 57 связан с третьим входом МВПР 3. Первый выход МПР 4 связан с входом БРЗ 58 и с третьим входом МПР 4 Выход БРЗ 58 связан с входом БРЗ 59 и с первым входом МВПУП 6. Выход БРЗ 59 связан с входом МДПП 10. Первый выход МВПУП 6 связан с входом БРЗ 60 и с третьим входом
МВПУП 6. Выход БРЗ 60 связан с вторым входом МВПУП бис входом БРЗ 61. Второй выход МПР 4 соединен с четвертым входом МПР 4. Второй выход МВПУП 6 связан с четвертым входом МВПУП 6. Выход БРЗ 61
0 связан с четвертым входом МВПР 3, с вторым входом БПР 9 и с входом БРЗ 62. Выход БРЗ 62 связан с вторым входом МПР 4 и с третьим входом У Б 13. Первый вход УКТП 11 связан с выходом термопары 12, установ5 ленной на жале паяльников. Выход УКТП 11 связан с вторым входом УКТП 11 и с вторым входом УБ 13. При использовании в БУ 1 перепрограммируемого устройства (УП) все выходы последнего связаны с исполнитель0 ными механизмами и устройствами через корректирующие БРЗ. Все связи, коммутирующие механизмы и устройстваа с БУ проходят через УД.
Для пайки микросхем иногда удобнее
5 иметь два жала паяльника, каждое из которых имеет свой нагревательный элемент. В этом случае дополнительно вводится вторая термопара, второе УКТП 11 и в У Б 13 вводится соответствующий комплект реле (компа0 раторов).
В исходном состоянии БУ 1, МПКС 2 и МВР 8 находятся в начальных позициях. Рука 39 механизмом 3 вертикального перемещения поднята, БПР 9 выключен.
5 Механизмом 4 поворота рука 39 повернута и находится над позицией схвата. МВПУП 6 находится в верхнем положении.
Pvkv 39 можно выполнить с двумя механизмами схвата (пунктирные линии на фиг.9),
0 что повышает производительность работы устройства.
Работа системы, например, в режиме установки и пайки микросхем на печатной плате, происходит следующим образом
5 (фиг. 1 и 2).
Перед началом работы на блоках 53-63 регулируемой задержки сигналов устанавливают необходимые времена задержки t0- tio. На УКТП 11 устанавливаются
Q минимально и максимально разрешенные температуры пайки. Для обеспечения качественной пайки желательно устанавливать эти температуры в пределах ± 5° от температуры, при которой применяемый припой
5 имеет максимальную растекаемость, но не более максимально допустимой для данного типа ридоэлементов-(определяется в технических условиях). Например, при использовании электроизмерительного контактного прибора МЗЗЗКА максимальная и минимальная температура пайки устанавливается с помощью двух управляющих стрелок, контакты которых связаны с управляющими обмотками реле, входящих в состав устройства 13 блокировки. При включении устройства напряжение питания Un через нормально замкнутые контакты 1-2 реле К1 устройства 13 блокировки поступает на обмотку нагревателя жала паяльника 42. Температура жала паяльника измеряется прибором МЗЗЗК с помощью термопары 12. При достижении температуры жала паяльника, равной максимальной температуре пайки, замыкаются контакты 1-3 прибора МЗЗЗК и включается реле К1. При 3Toiv размыкаются контакты 1 и 2 и замыкаются контакты 3 и 4 реле К1, разрывая цепь питания нагревателей и включая ре те К2, которое через контакты 3 и 4 встает на самоблокировку. Контакты 5 и 6 реле К2 замыкают цепь питания реле КЗ, которое контактами 3 и 4 подготавливает цепь Пуск устройства 13 блокировки. Если по каким-либо причинам температура жала паяльников падает ниже уровня, установленного второй стрелкой прибора МЗЗЗК, то замыкаются контакты 1 и 2 прибора МЗЗЗК, включая реле К4, контакты которого выключают реле К2, выключается реле КЗ и цепь сигнала Пуск устройства 13 блокировки размыкается.
Таким образом, в устройстве поддерживается оптимальная температура пайки, обеспечивая высокое качество паяных соединений.
Печатная плата с носителем 47 устанавливается в направляющих роликах 49 стани- ны 48. С помощью корректирующих устройств 50 и 51 печатная плата устанавливается в начальную точку координатного стола 46 и фиксируется магнитным фиксатором 52.
По команде Пуск на вход 1 устройства 13 блокировки подается сигнал (фиг.2). Если температура жала паяльника 42 находится в заданных пределах, сигнал с выхода устройства 13 блокирови поступает на вход устройства ввода МПКС 2, вход блока регулируемой задержки сигнала 63 и на первый вход блока управления МПКС 2. Сигнал с УВ поступает на первый вход MB 14. Координатный стол с установленной печатной платой перемещается исполнительным механизмом в определенную позицию, причем точка печатной платы с заданными устройством ввода координатами размещается под углом паяльников 42. Механизм 14 выбора перемещается до совпадения кода датчика 28 с кодом сигнала, поступившего с У В. При совпп ми кода сигнал с выхода
MB 14 поступает на второй вход MB 14. останавливая его и подготавливая к последующей работе.
Через время to сигнал с выхода БРЗ 63
поступает на вход БРЗ 53 и на первый вход МВР 8. Толкатель 19 выталкивает радиоэлемент 26 из кассеты 25 на позицию схвата устройства 27 предварительного позиционирования и ориентации и планками подни0 мает кассету 25 на одну позицию вверх вдоль подвижной стойки 23. Сигнал с выхода МВР 8 поступает на второй вход МВР 8, останавливая и подготавливая его к повторной работе.
5
Сигнал с выхода блока 53 задержки через время ti поступяет на первый вход механизма 3 вертикального перемещения радиоэлементов и на вход блока 54 задерж0 ки. Рука 39 начинает перемещаться вниз. Момент включения механизма вертикального перемещения руки манипулятора определяется временем задержки сигнала в блоке 53, регулировка которого позволяет, не сни5 жая надежности выгрузки радиоэлементов из кассеты, включить механизм вертикального перемещения радиоэлементов 3 раньше, чем произойдет отключение механизма выгрузки радиоэлементов 8, что сокращает
0 общий цикл работы на время tn.
Рука 39 механизмом вертикального перемещения 3 опускается на позицию схвата радиоэлемента. Сигнал с блока 54 задержки через время t2 поступает на первый вход
5 БПР 9. Включение механизма схвата БПР 9 раньше, чем произойдет отключение механизма 3 вертикального перемещения, сокращает общий цикл работы устройства на время ti2. По завершении вертикального пе0 ремещения сигнал с первого выхода МВПР 3 поступает на вход блока 55 задержки, а с третьего выхода - на пятый вход механизма вертикального перемещения радиоэлементов 3, останавливая и подготавливая его к
5 последующей работе.
Сигнал с выхода блока 55 задержки через время т.з поступает на вход блока 56 задержки и на второй вход механизма 3 вертикального перемещения радиоэлемен0 тов. Время ta, которое устанавливается регулировкой блока 55 задержки, определяет надежность схвата радиоэлемента блоком 9 подготовки. Рука 39 механизмом 3 вертикального перемещения поднимается вверх
с на исходную позицию. Сигнал с выхода блока 56 задержки через время t4 поступает на первый вход механизма 4 поворота радиоэлементов. Включение механизма 4 поворота радиоэлементов раньше, чем произойдет отключение механизма 3 вертикального перемещения, сокращает общее время работы устройства на время ш.
По завершении вертикального перемещения сигнал с второго выхода МВПР 3 поступает на вход блока 57 задержки, а с четвертого выхода - на шестой вход механизма 3 вертикального перемещения радиоэлементов, останавливания и подготавливания его к последующей работе. При повороте руки 39 жестко установленный на ней механизм подготовки жала паяльника (фиг.8), перемещаясь под узлом паяльника, своей щеткой счищает с жала паяльника 42 окалину, излишки припоя и т.д , которые попадают в каркас 41. Смачивая щетку спиртовым раствором флюса, добиваются того, что с вала паяльника будут удаляться жировые пятна и окислы, что повышает качество пайки.
Сигнал с выхода блока 57 задержки через время ts поступает на третий вход меха- низма 3 вертикального перемещения радиоэлементов. Рука 39 механизма 3 вертикального перемещения начинает опускаться. Включение механизма 3 вертикального перемещения раньше, чем произойдет отключение механизма 4 поворота, сокращает общее время работы устройства на время tn. По завершении поворота сигнал с первого выхода МПР 4 поступает на вход блока 58 задержки и на третий вход механизма 4 поворота, останавливая и подготавливая его к последующей работе.
Сигнал с выхода блока 58 задержки через время te поступает на первый вход М В ПУП б и на вход блока 59 задержки. Узел паяльников механизмом 6 вертикального перемещения начинает опускаться. Одновременно МДПП 10 начинает падавать на жало паяльника 42 (или к месту пайки) дозу припоя. Регулировка дозы припоя осуществляется регулировкой длины штока 30 (фиг.З) (или многократным включением электромагнита). Включение МВПУП 6 раньше, чем произойдет отключение МВПР 3, сокращает общее время работы устройства на время ЦБ. После окончания перемещения сигнал с третьего выхода МВПР 3 поступает на пятый вход МПВР 3, отключая его и подготавливая к последующей работе. Через время t, задаваемое блоком 59 задержки, происходит отключение подачи припоя. После окончания перемещения сигнал с первого выхода МВПУП 6 поступает на вход блока 60 задержки и на третий вход МВПУП б, отключая его и подготавливая к последующей работе.
Сигнал с выхода блока 60 задержки через интервал времени te поступает на вход
блока 61 задержки, на второй вход БПР 9 и на второй вход МВПУП 6. Время ts, задаваемое блоком 61 задержки, определяет время пайки, необходимое для качественного
расплавления припоя на выходах радиоэлементов и контактных площадках печатной платы. Через время te узел паяльников механизмом 6 вертикального перемещения поднимается. Сигнал с выхода блока 61
0 задержки через время te поступает на вход блока 62 задержки, на второй вход БПР 9 и на четвертый вход МВПР 3. Через время tg отключается механизм схвата БПР 9 и рука 39 механизмом вертикально5 го перемещения начинает перемещаться вверх. Включение МВПР 3 раяьше, чем произойдет отключение МВПУП 6, сокращает общее время работы устройства на время tie. После окончания перемещения
0 сигнал с четвертого выхода МВПР 3 поступает на шестой вход МВПР 3, отключая его и подготавливая к последующей работе. После окончания перемещения сигнал с второго выхода МВПУП 6 поступает на
5 четвертый вход МВПУП 6, останавливая его и подготавливая к последующей работе.
Сигнал с выхода блока 62 задержки через интервал времени tio поступает на вто0 РОЙ вход МПР 4 и на третий вход устройства 13 блокировки. После окончания перемещения сигнал с второго выхода МПР 4 поступает на четвертый вход МПР 4, останавливая его и подготавливая к последующей работе.
5 Цикл работы повторяется.
После завершения пайки всех радиоэлементов с помощью оптического устройства 15 визуального контроля проверяется качество пайки. В устройство ввода или в
0 БУ 1 (при использовании УП) вводятся координаты точек, пайка которых не удовлетворяет заданным требованиям. Для этих точек повторяется процесс пайки.
Дополнительно сократить время рабо5 ты устройства можно введением второй руки 39 (пунктирные линии на фиг.9). При этом операции пайки и схвата радиоэлементов совмещаются. При использовании БУ 1 с перепрограммируемым устройством УП
0 предлагаемое устройство, работая в режиме установки и пайки, реализует временные диаграммы, приведенные на фиг.2.
Сигналы, поступающие с выходов исполнительных механизмов, устройства кон5 ТР°ЛЯ температуры пайки, блоков задержки на входы блока управления, используются для регистрации и индикации работы устройства.
При работе системы в режиме установки радиоэлементов, в режиме пайки, в режиме выпайки и снятия радиоэлементов изменяется количество переходов и их последовательность.
Как видно из временных диаграмм и описания работы, предлагаемая система за счет совмещения ряда операций позволяет сократить время пайки. Кроме того, в известном устройстве применяется пассивный контроль качества пайки, а в предлагаемой системе введены МПУП 5, УБ 13 и устройство контроля температуры пайки, связанные с блоком управления. Эта связь позволяет отключать систему в случае выхода его из расчетных режимов и оперативно изменять условия пайки, тем самым повысить качество. Поскольку в известном устройстве отсутствуют блоки регулируемой задержки, оно не позволяет изменять время пайки, температуру пайки, а это не позволяет ему работать с широкой гаммой припоем (каждый имеет свою температуру плавления, кристалли- зациии и т.д.) и радиоэлементов (для каждого существует свое оптимальное количество припоя для пайки).
Формула изобретения
Система установки и пайки радиоэлементов на печатной плате, содержащая основание, на котором установлен регулируемый суппорте оптическим устройством визуального контроля, механизм вертикального перемещения узла паяльников с механизмом дозирования усилия прижатия и механизм дозированной подачи припоя, отличающаяся тем, что, с целью повышения производительности работы и качества пайки, оно дополнительно снабжено блоком управления, блоком подготовки радиоэлементов, механизмами поворота и вертикального перемещеня блока подготовки радиоэлементов, механизмом перемещения координатного стола, механизмами выбора и выгрузки радиоэлементов, устройством контроля температуры пайки и устройством блокировки, при этом выход устройства блокировки соединен с первым входом блока управления, первый и третий
выходы которого соединены с первым - третьим входами механизма перемещения координатного стола соответственно, первый и второй выходы последнего соединены
соответственно с первым входом механизма выбора радиоэлементов и вторым входом блока управления, четвертый выход которого соединен с вторым входом механизма выбора радиоэлементов, выход которого соединен с третьим входом блока управления, пятый и шестой выходы которого соединены с первым и вторым входами механизма выгрузки радиоэлементов, выход которого соединен с четвертым входом
блока управления, седьмой - двенадцатый выходы блока управления соединены соответственно с первым - шестым входами механизма вертикального перемещения блока подготовки радиоэлементов, первый - четвертый выходы последнего соединены соответственно с пятым - восьмым входами блока управления, тринадцатый - шестнадцатый выходы последнего соединены соответственно с первым - четвертыми
входами механизма поворота блока подготовки радиоэлементов, первый и второй выходы которого соединены соответственно с девятым и десятым входами блока управления, семнадцатый - двадцатый выходы блоха управления соединены соответственно с первым - четвертым входами механизма вертикального перемещения узла паяльников, первый и второй выходы которого соединены соответственно с одиннадцатым и
двенадцатым входами блока управления, двадцать первый и двадцать второй выходы которого соединены соответственно с первым и вторым входами блока подготовки радиоэлементов, двадцать третий выход
блока управления соединен с входом механизма дозирования подачи припоя, двадцать четвертый выход блока управления соединен с первым входом устройства контроля температуры пайки, выход которого
соединен с тринадцатым входом блока управления, двадцать четвертый и двадцать пятый выходы которого соединены соответственно с первым и вторым входами устройства блокировки.
I
Фиг. 7
Фиг. 2
Фиг. 7
зНс
J
I й Ifa
ъ&
35
у IIIH
35
И
k
3Qc
37 , |
ч
Фиг.
Ч;
J5
/1И
-о
Ч;
г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для пайки | 1974 |
|
SU497103A1 |
| ПАЯЛЬНАЯ ГОЛОВКА АВТОМАТА ПАЙКИ ЭЛЕКТРОЭЛЕМЕНТОВ НА ПЕЧАТНЫЕ ПЛАТЫ | 2009 |
|
RU2426284C2 |
| Устройство для пайки | 1981 |
|
SU984753A1 |
| Устройство для пайки радиоэлементов | 1990 |
|
SU1824266A1 |
| Устройство для пайки микросхем | 1977 |
|
SU837650A1 |
| Устройство для пайки | 1978 |
|
SU712209A1 |
| Полуавтомат для сборки и пайки проводов с печатной платой | 1979 |
|
SU859068A1 |
| Устройство для демонтажа радиоэлементов | 1981 |
|
SU984081A1 |
| Устройство для пайки микросхем | 1987 |
|
SU1423311A1 |
| Способ пайки радиоэлементов к печатной плате | 1985 |
|
SU1299720A1 |
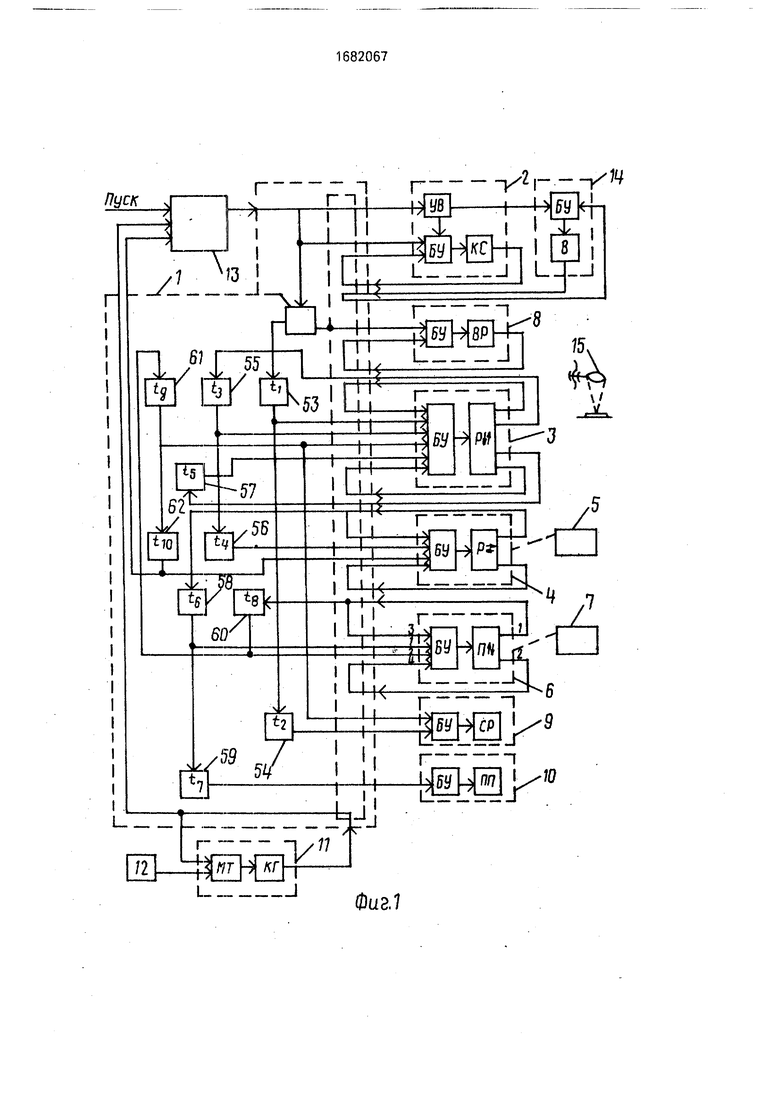
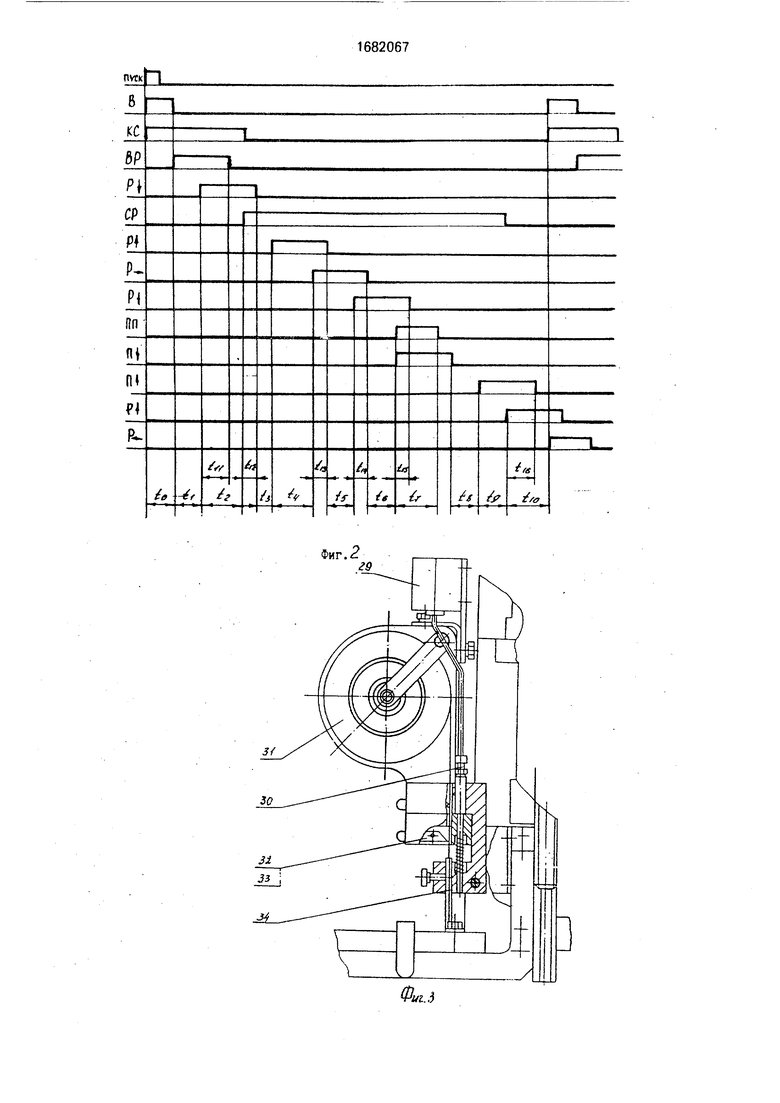
Изобретение относится к механизации сборочных работ при производстве радиоэлектронных приборов, а именно к операциям установки и пайки радиоэлементов на печатной плате. Цель изобретения - повышение производительности и качества пайки. Система установки и пайки радиоэлементов на печатной плате содержит основание, на котором установлен регулируемый суппорт с оптическим устройством визуального контроля, механизм вертикального перемещения узла паяльников с мехэИзобретение относится к механизации сборочных работ при производстве роаио- электронных приборов, а именно к операциям установки и пайки радиоэлементов к печатным платам, например микросхем с планарно расположенными выводами. Целью изобретения является повышение производительности работы и качества пайки. низмом дозирования усилия прижатия и механизм дозированной подачи припоя. Система дополнительно снабжена блоком подготовки радиоэлементов, механизмами поворота и вертикального перемещения блока подготовки радиоэлементов, механизмом перемещения координатного стола, механизмами выбора и выгрузки радиоэлементов, блоком управления, устройством блокировки и устройством контроля температуры пайки. За время работы системы рукой организуется захват радиоэлементов из кассет и перенос их в фиксированную точку печатной платы, Механизм перемещения координатного стола по команде с блока управления перемещается в требуемую точку пространства. Узел паяльника 6, опускаясь, осуществляет пайку. Качество пайки контролируется с помощью оптического прибора и определяется температурой и временем пайки. Все исполнительные механизмы связаны с перепрограммируемым блоком управления и блоками регулируемой задержки, что позволяет изменять количество и порядок выполнения системой операций.11 ил. На фиг.1 представлена блок-схема системы, реализующей установку и пайку радиоэлементов на печатной плате; на фиг.2 - временные диаграммы устройства; на фиг.З - механизм дозированной подачи припоя; на фиг.4 - электрическая принципиальная схема блока регулируемой задержки сигнала; на фиг,5 - временные диаграммы блока регулируемой задержки сигнала; на фиг.6 и 7 - кинематические схеСО С о оо N3 О О vj
45
фие.Ю
D
i
I
23
Фиг. 11
| УСТРОЙСТВО ДЛЯ ПАЙКИ МИКРОСХЕМ | 0 |
|
SU299046A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для пайки микросхем | 1987 |
|
SU1423311A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
