(54) РЕГУЛЯТОР ТОРМОЖЕНИЯ ПОПЕРЕЧИНЫ ГИДРАВЛИЧЕСКОГО ПРЕССА

| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU774967A1 |
| Регулятор торможения поперечины гидравлического пресса | 1979 |
|
SU770841A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821205A1 |
| Регулятор торможения поперечиныгидРАВличЕСКОгО пРЕССА | 1979 |
|
SU821206A1 |
| Система управления гидравлическимпРЕССОМ | 1979 |
|
SU821204A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903213A1 |
| Система управления гидравлическим прессом | 1980 |
|
SU903212A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ МОЩНОСТИ ЭНЕРГОБЛОКА | 2003 |
|
RU2258146C1 |
| Регулятор торможения поперечины гидравлического пресса | 1978 |
|
SU727477A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
1
Изобретение относится к машинострос: нию, в частности к конструкции гидропрест сов.
Известен регулятор торможения поперечины гидравлического пресса, содержащий усилитель, соединенный через исполнительный механизм с гидроусилителем, связанным с клапанным распределителем пресса, а также задатчик высоты подъема поперечины, функциональный преобразователь и датчик положения поперечины, связанные с элементом сравнения и логическим устройством с ключом, выход которого соединен с элементом сравнения I..
Недостатки известного регулятора обусловлены косвенным способом определения положения поперечины при ее реверсе, что приводит к снижению точности и производительности ковки.
Цель изобретения - повышение точности и производительности ковки.
Поставленная цель достигается тем, что регулятор торможения поперечины, содержащий усилитель, соединенный через исполнительный механизм с гидроусилителем, связанным с клапанным распределителем пресса, а также задатчик высоты подъема поперечины, функциональный преобразователь и датчик положения поперечины, связанные с элементом сравнения и логическим устройством с ключом, выход которого соединен с элементом сравнения, снабжен сумматором и нелинейным преобразователем типа «ограничение, а логическое устройство выполнено в виде соединенных последовательно нуль-компаратора, коммутатора полярности и элемента задержки, при этом вход нуль-компаратора соединен с выходом элемента сравнения, выходы коммутатора
10 полярности и элементы задержки подключены к входам ключа, причем исполнительный механизм связан с входами функционального преобразователя и нелинейного преобразователя типа «ограничение, а выход пос15леднего соединен с элементом сравнения.
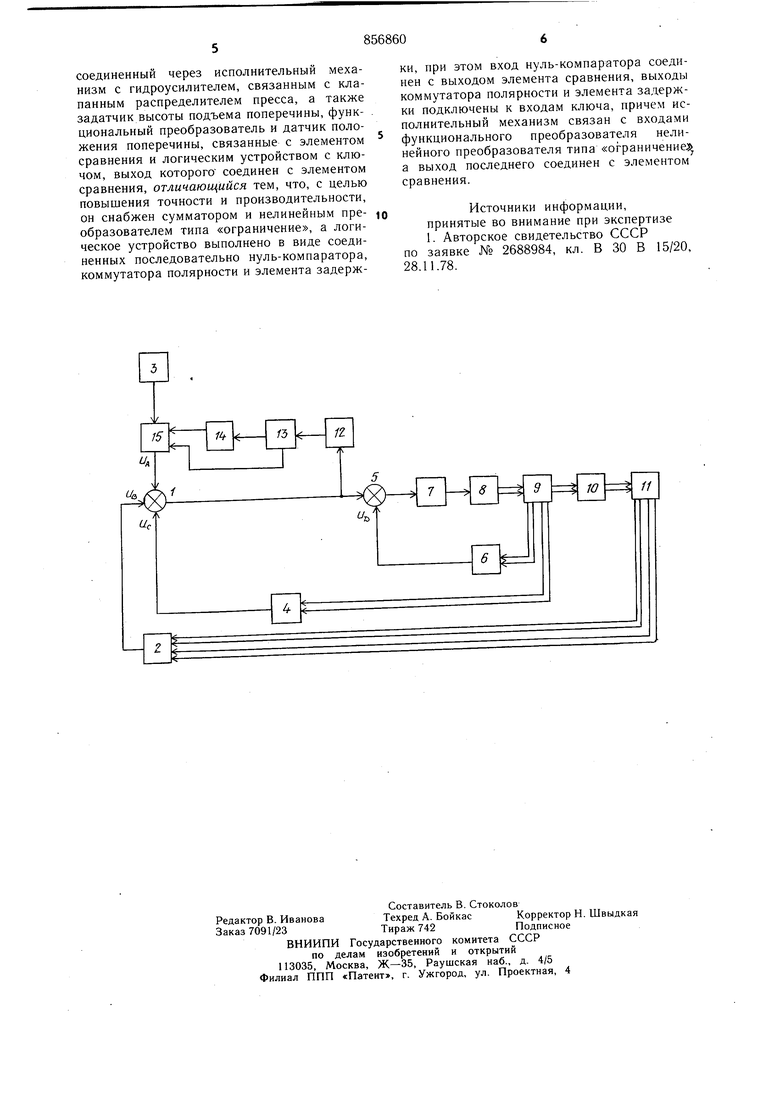
На чертеже представлена функциональная схема регулятора.
Регулятор состоит из элемента I сравнения, на вход которого поступают сигналы датчика2 положения подвижной поперечи20ны, задатчика 3 высоты подъема поперечины и нелинейного преобразователя 4 типа «ограничение. Выход элемента 1 сравнения связан с сумматором 5, на вход которого поступает также сигнал и с функционального преобразователя 6. Сигнал с сумматора 5 подается на усилитель 7, который управляет электрогидравлическим исполнительным механизмом 8, воздействующим на шток золотника гидроусилителя 9, управляюндего клапанным распределителем 10 пресса 11. С выхода элемента 1 сравнения сигнал поступает также на нуль-комнаратор 12, воздействующий через коммутатор 13 полярности то на элемент 14 задержки, то на коммутационный ключ 15, к которому подключен также и выход элемента 14 задержки. Вход коммутационного ключа 15 связан с задатчиком 3 высоты подъема поперечины, а выход-с элементом 1 сравнения. Элементы 12- 14 схемы составляют логическое устройство регулятора. Регулятор работает следующим образом. В исходном состоянии поперечина находится в нижней заданной точке, соответствующей заданному размеру. При этом сигналыУ, VB , Vc., V, соответственно с задатчика 3 высоты подъема поперечины, датчика 2 положения подвижной поперечины, нелинейного элемента 4 типа «ограничение и функционального преобразователя 6 равны нулю, выходное звено электрогидравли- ческого исполнительного механизма 8 занимает среднее положение и логическое устройство 2-14 в исходном состоянии выдает команду на движение вверх при этом открывается ключ 15, При введении задания высоты подъема поперечины задатчиком 3 на выходе сумматора 5 появляется сигнал, пропорциональный Js,.H . через усилитель 7 вызывает перемещение выходного звена электрогидравлического исполнительного механизма У в крайнее положение, соответствующее открытию клапанов 10 на движение вверх. По мере подъема поперечины сигнал Vg возрастает и в момент равенства нулю, алгебраической суммы сигналов, пропорциональных VX, VB, i , М), на выходе сумматора 5 изменяется фаза сигнала. Введение нелинейного сигнала Vc типа «ограничение на вход элемента 1 сравнения приводится к равенству нулю алгебраической суммы сигналов, пропорциональных , Vg, , Vj,, на выходе сумматора 5 на более удаленном расстоянии поеречины от заданной точки, чем без введения его. В результате этого выходное звено электрогидравлического исполнительного механизма 8 начинает раньше перемещаться и в режиме слежения за убывающей разностью пропорциональной -(Vg + Vc, + Vjj) к среднему положению, воздействуя на гидроусилитель 9 и вызывая закрытие клапанов 10, а следовательно, и торможение поперечины. При достижении поперечной точки, удаленной от заданной на расстоянии, пропорциональном сигналу Vt., при этомУ VB +Vc, а VD О, выходное звено электрогидравлического исполнительного механизма 8 возвращается в положение, близкое к среднему, при котором клапаны 10 полностью закроются, а поперечина вследствие инерции своих маховых масс продолжает движение. В верхней заданной точке поперечина останавливается (это обеспечивается правильным выбором величины сигнала Vc. при наладке), а исполнительный механизм 8 возвращается в среднее положение. В момент времени когда VA VB + V; нуль-компаратор 12 логического устройства изменяет полярность, а коммутатор 13 полярности разрещает ее прохождение через элемент 14 задержки. После выдержки времени, выбираемой машинистом и необходимой для манипулирования поковки, сигнал с элемента 14 задержки воздействует на ключ 15, который отключает сигналУд от элемента 1 сравнения, в результате чего на выходе сумматора 5 присутствуют сигналы, пропорциональные /, VcJiV-. Выходное звено электрогидравлического исполнительного механизма 8 под действием сигнала Ve перемещается в другое крайнее положение, при этом открываются клапаны, обеспечивающие движение поперечины вниз. По мере опускания поперечины сигнал Vg убывает, и в момент равенства нулю алгебраической суммы сигналов, пропорциональных VB, Vc и , на выходе сумматора 5 изменяется фаза сигнала. Выходное звено электрогидравлического исполнительного механизма 8 в режиме слежения за убывающей разностью сигналов, пропорциональной V - , начинает перемещаться к среднему положению, вызывая закрытие клапанов 10 и торможение поперечины. При торможении поперечины убиваютСигналы Vg и. В момент времени когда на выходе сумматора 5 разность сигналов, пропорциональных Vg, t и Vj , равна нулю (при этом Vg ъ Vj 0) выходное звено приближается к среднему положению, а впускные клапаны 10 рабочих цилиндров полностью закрываются. Поперечина под действием маховых масс продолжает движение, сигнал Vg убивает, а выходное звено исполнительного механизма 8 возвращается в среднее положение. В момент времени когдаУ5 Vc. нуль-компаратор 12 логического устройства изменяет полярность, а коммутатор 13 полярности разрещает ее прохождение прямо на ключ 15, минуя элемент 14 задержки. Коммутационный ключ 15 подключает сигналVA к элементу 1 сравнения, в результате чего на выходе сумматора 5 снова появляются сигналы, про порциональные V, VB,V, V, и цикл работы повторяется. Эфеективность использования регулятора обуславливается повышением точности и производительности ковки. Формула изобретения Регулятор торможения поперечины гидравлического пресса, содержащий усилитель
соединенный через исполнительный механизм с гидроусилителем, связанным с клапанным распределителем пресса, а также задатчик высоты подъема поперечины, функциональный преобразователь и датчик положения поперечины, связанные с элементом сравнения и логическим устройством с ключом, выход которого соединен с элементом сравнения, отличающийся тем, что, с целью повышения точности и производительности, он снабжен сумматором и нелинейным преобразователем типа «ограничение, а логическое устройство выполнено в виде соединенных последовательно нуль-компаратора, коммутатора полярности и элемента задержки, при этом вход нуль-компаратора соединен с выходом элемента сравнения, выходы коммутатора полярности и элемента задержки подключены к входам ключа, причем исполнительный механизм связан с входами функционального преобразователя нелинейного преобразователя типа «ограничение а выход последнего соединен с элементом сравнения.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР
по заявке № 2688984, кл. В 30 В 15/20
