Ш
// 9 8
,12
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидропривод шагового толкателя | 1987 |
|
SU1523746A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1966 |
|
SU185484A1 |
| Гидрораспределитель | 1986 |
|
SU1571318A1 |
| Система управления тормозом шахтной подъемной машины | 1981 |
|
SU1009994A1 |
| ГИДРАВЛИЧЕСКИЙ ПРЕСС | 2013 |
|
RU2521570C1 |
| Устройство для безразборного определенияТЕХНичЕСКОгО СОСТОяНия гидРАВличЕСКиХСиСТЕМ | 1975 |
|
SU832146A1 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2605802C2 |
| ГИДРОПРИВОД ОПРОКИДЫВАЮЩЕГО МЕХАНИЗМА ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU2049690C1 |
| ГИДРОПРИВОД | 1991 |
|
RU2028522C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЛОПАСТЯМИ РАБОЧЕГО КОЛЕСА ГИДРОТУРБИНЫ | 1996 |
|
RU2106522C1 |
Изобретение относится к системам управления механизированным инструментом. Цель изобретения - расширение технологических возможностей и повышение надежности за счет изменения режима работы и контролирования процесса затяжки резьбового соединения. Перед началом работы гидравлическим гайковертом устанавливают требуемое давление в напорном трубопроводе 19 и эталонное время с по
О СО
N О
тшЛ
V
мощью переменного резистора в блоке 18 сравнения времени. Для этого кнопкой Пуск включают электродвигатель 1, который приводит в действие гидронасос 2, последний создает рабочее давление в напорном трубопроводе 19. Затем с помощью регулируемого редукционного клапана 5 по манометру б устанавливается необходимое рабочее давление. Затем поочередно нажимают на кнопки Рабочий ход и Холостой ход на блоке 16 управления трехпозиционным двухлинейным золотником 13, осуществляют рабочий или холостой ход поршня 9, который через шток 10, хра- повый механизм и рабочую головку осуществляет затяжку резьбового соединения.
Изобретение относится к машиностроению, а именно к системам управления механизированным инструментом, и может быть использовано при сборке резьбовых соединений.
Цель изобретения - расширение технологических возможностей и повышение надежности за счет изменения режимов работы и контролирования процесса затяжки резьбового соединения.
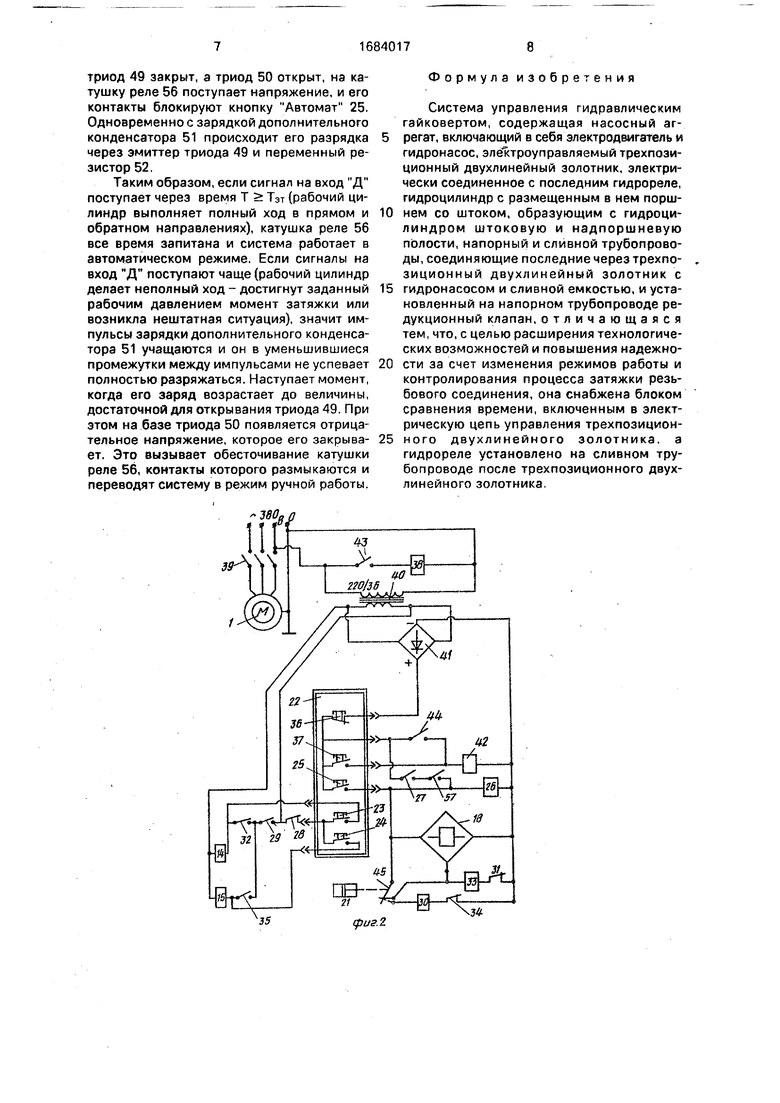
На фиг. 1 изображена схема системы управления гидравлическим гайковертом, общий вид; на фиг. 2 - принципиальная электрическая схема системы управления гидравлическим гайковертом; на фиг. 3 - принципиальная электрическая схема блока сравнения времени.
Система управления гидравлическим гайковертом содержит насосный агрегат, включающий электродвигатель 1 и гидронасос 2, фильтр 3, обратный клапан 4, регулируемый редукционный клапан 5, манометр 6, газогидравлический аккумулятор 7, гидроцилиндр 8 с размещенным в нем поршнем 9 с штоком 10, образующие совместно штоковую 11 и надпоршневую 12 полости соответственно, электроуправляемый трех- позиционный двухлинейный золотник 13 с электромагнитами 14 и 15 по концам, электрически связанные с входом электромагнитов 14 и 15 и электродвигателя 1, блоки 16 и 17 управления, электрически связанный выходами с входами блоков 16 и 17 управления блок 18 сравнения времени, напорный 19 и сливной 20 трубопроводы, установленный на сливном трубопроводе 20 датчик 21, выполненный в виде гидрореле потока и электрически связанный с входом
Для перехода на автоматический режим нажимают на кнопку Автомат, при этом подается напряжение на блок 18 сравнения времени и датчик 21, выполненный в виде гидрореле потока. При продолжительности одного цикла рабочего и холостого ходов поршня 9 больше установленного эталонного времени работа осуществляется в автоматическом режиме. При продолжительности одного цикла рабочего и холостого ходов меньше установленного эталонного времени блок 18 сравнения времени разрывает электрическую цепь питания блока 16 управления и переводит систему управления на ручной режим работы. 3 ил.
блока 18 сравнения времени, и пульт 22 управления. Блок 16 управления трехпозиционным двухлинейным золотником 13 включает расположенные на пульте 22 управления кнопки холостого хода 23, рабочего хода 24 и Автомат 25 - перехода на автоматический режим работы, реле 26 с нормально разомкнутыми контактами 27 и 28 и нормально замкнутыми контактами 29,
реле 30 с нормально замкнутыми контактами 31 и нормально разомкнутыми контактами 32 и реле 33 с нормально замкнутыми контактами 34 и нормально разомкнутыми контактами 35. Блок 17 управления электродвигателя 1 включает расположенные на пульте 22 управления кнопки Стоп 36 и Пуск 37, магнитный пускатель 38 с нормально разомкнутыми контактами 39, трансформатор 40, выпрямитель 41, реле 42
с нормально разомкнутыми контактами 43 и 44, Датчик 21 содержит двухпозиционный переключатель 45, который выходами связан с реле 30 и 33, а входом - с кнопкой Автомат 25.
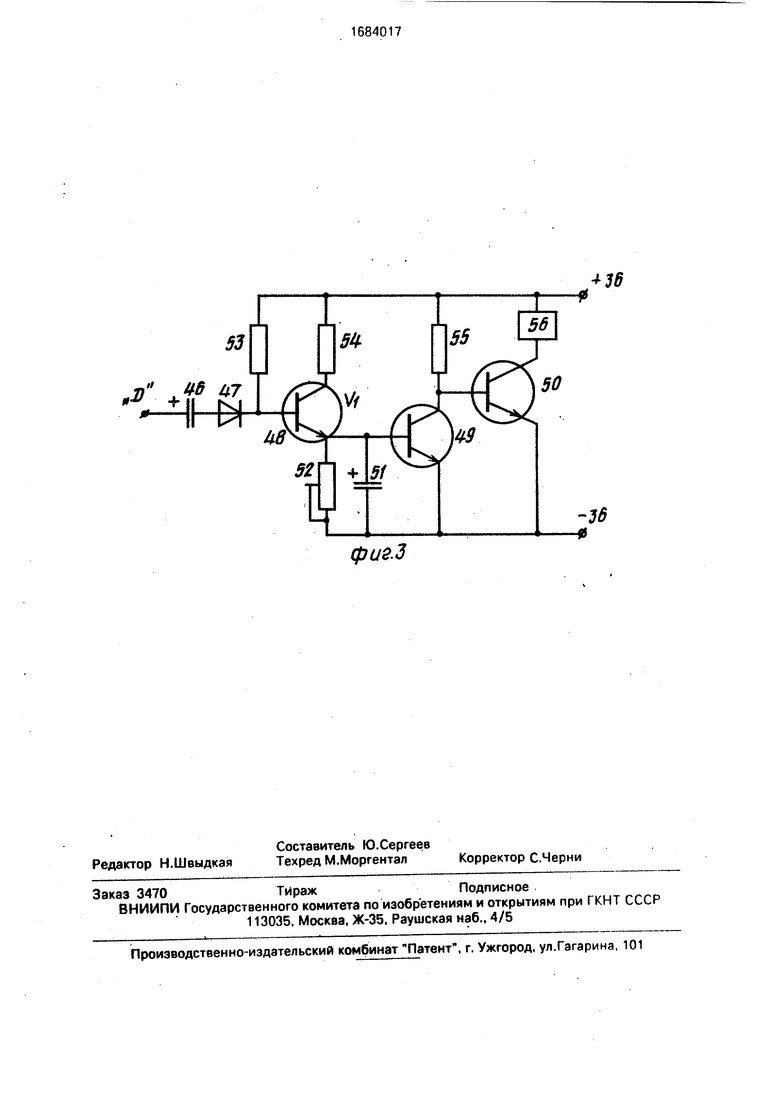
Блок 18 сравнения времени соединен с выходом переключателя 45 и включает последовательно соединенные конденсатор 46, диод 47, триоды 48,49 и 50, дополнительный конденсатор 51, соединенный одним
концом с эмиттером и базой триодов 48 и 49 соответственно, другим -с эмиттерами триодов 49 и 50 и образующий с последними первый выход блока сравнения времени, переменный резистор 52, включенный параллельно дополнительному конденсатору 51, резисторы 53 и 54, один из которых соединен одним концом с базой, другой - с эмиттером триода 48, резистор 55, соединенный
одним концом с эмиттером и базой триодов 49 и 50 соответственно, и реле 56 с контактами, соединенное одним концом с эмиттером триода 50, а другим - со свободными концами резисторов 53, 54 и 55, образующих совместно второй выход блока сравнения времени.
Шток 10 поршня 9 через храповый механизм соединен с головкой под ключ (не показаны).
Система управления гидравлическим гайковертом работает следующим образом.
Перед началом работы устанавливается требуемое рабочее давление в напорном трубопроводе 19, необходимое для обеспечения требуемого момента затяжки резьбового соединения. Для этого нажимают на кнопку Пуск 37, на реле 42 подается напряжение, которое срабатывает и замыкает, контакты 44 и 43. При замыкании контактов 43 подается напряжение на магнитный пускатель 38, который замыкает контакты 39 и включает электродвигатель 1, последний приводит в действие гидронасос 2, который создает рабочее давление в напорном трубопроводе 19. При отпускании кнопки Пуск 37 реле 42 остается включенным в цепь, так как его контакты 44 замкнуты, и как следствие, цепь питания электродвигателя 1 не разрывается. Затем с помощью регулируемого редукционного клапана 5 по манометру 6 устанавливается необходимое рабочее давление.
При режиме ручного управления работой гидравлического гайковерта поочередно нажимают кнопки 23 и 24 холостого и рабочего хода. При этом напряжение поочередно подается на электромагниты 14 или 15 трехпозиционного двухлинейного золотника 13, и рабочая жидкость из напорного, трубопровода 19 поочередно подается или в штоковую 11 или в надпоршневую 12 полости гидроцилиндра, поршень 9 с штоком 10 совершают холостой или рабочий ход. В этом случае работа гидравлического гайковерта осуществляется под контролем оператора.
Для перехода на автоматический режим работы оператор нажимает на кнопку Автомат 25. При этом в зависимости от положения переключателя 45 напряжение подается или на реле 30, или на реле 33. При подаче, например, напряжения на реле 30 одновременно подается напряжение на реле 26 и 42, при этом нормально разомкнутые контакты 27 и 57 блокируют кнопку Автомат 25, нормально замкнутые контакты 29 размыкаются и отключают ручное управление, а нормально разомкнутые контакты 28 и 32 замыкаются, и через них подается напряжение на электромагнит 14 холостого хода. В результате золотник 13 перемещается а левое положение, рабочая жидкость из напорного трубопровода 19 поступает в
полость 11 гидроимминдра 8, а полость 12 соединяется со :ным трубопроводом 20. Под давлением жидкости поршень 9 начинает перемещаться в осевом направлении, при этом в сливном трубопроводе 20
0 появляется поток жидкости. После остановки поршня 9 поток в сливном трубопроводе 20 исчезает и датчик 21 воздействует на переключатель 45, /оторый выключает реле 30 и включает рея 33, которые замыкают
5 контакты 31 и 35 t. размыкают контакты 32 и 34, в результате подается напряжение на электромагнит 15 рабочего хода, который,в свою очередь, перемещает золотник 13, и рабочая жидкость из напорного трубопро0 вода 19 поступает в полость 12 гидроцилиндра 8, а полость 11 соединяется со сливным трубопроводом 20. Происходит рабочий ход поршня 9, который через храповый механизм и головку под ключ осуществляет за5 тяжку резьбового соединения. По окончании рабочего хода поршня 9 последний останавливается, поток жидкости в сливном трубопроводе 20 исчезает, срабатывает датчик 21с переключателем 45, ко0 торый выключает реле 33 и включает реле 30, которые замыкают контакты 32 и 34 и размыкают контакты 31 и 35, в результате подается напряжение на электромагнит 14 холостого хода. Далее циклы автоматически
5 повторяются в указанной последовательности. Работа в автоматическом режиме может быть прервана оператором нажатием на кнопку Стоп 36 или в случае срабатывания блока сравнения времени.
0 При подаче напряжения через переключатель 45 на реле 33 и электромагнит 15 рабочего хода одновременно подается напряжение на вход Д блока сравнения времени. При прохождении электрического
5 сигнала через конденсатор 46 выделяется переменная составляющая, а при прохождении через диод 47 - положительные полуволны, которые поступают на базу триода 48, открывая последний. В это время через
0 триод 48 происходит зарядка дополнительного конденсатора 51. Время зарядки дополнительного конденсатора регулируется с помощью переменного резистора 52 и является эталонным временем Тэт, определя5 ющим продолжительность одного рабочего цикла. Параметры элементов блока сравнения времени подобраны так, что однократного импульса тока недостаточно для зарядки дополнительного конденсатора 51, чтобы открыть триод 49. В этом состоянии
триод 49 закрыт, а триод 50 открыт, на катушку реле 56 поступает напряжение, и его контакты блокируют кнопку Автомат 25. Одновременно с зарядкой дополнительного конденсатора 51 происходит его разрядка через эмиттер триода 49 и переменный резистор 52,
Таким образом, если сигнал на вход Д поступает через время Т Тэт (рабочий цилиндр выполняет полный ход в прямом и обратном направлениях), катушка реле 56 все время запитана и система работает в автоматическом режиме. Если сигналы на вход Д поступают чаще (рабочий цилиндр делает неполный ход - достигнут заданный рабочим давлением момент затяжки или возникла нештатная ситуация), значит импульсы зарядки дополнительного конденсатора 51 учащаются и он в уменьшившиеся промежутки между импульсами не успевает полностью разряжаться. Наступает момент, когда его заряд возрастает до величины, достаточной для открывания триода 49. При этом на базе триода 50 появляется отрицательное напряжение, которое его закрывает. Это вызывает обесточивание катушки реле 56, контакты которого размыкаются и переводят систему в режим ручной работы.
Y53 1 Х 29 гв рЈ-«:
Формула изобретения
Система управления гидравлическим гайковертом, содержащая насосный агрегат, включающий в себя электродвигатель и гидронасос, элёктроулравляемый трехпози- ционный двухлинейный золотник, электрически соединенное с последним гидрореле, гидроцилиндр с размещенным в нем поршнем со штоком, образующим с гидроцилиндром штоковую и надпоршневую полости, напорный и сливной трубопроводы, соединяющие последние через трехпо- зиционный двухлинейный золотник с
гидронасосом и сливной емкостью, и установленный на напорном трубопроводе редукционный клапан, отличающаяся тем, что, с целью расширения технологических возможностей и повышения надежности за счет изменения режимов работы и контролирования процесса затяжки резьбового соединения, она снабжена блоком сравнения времени, включенным в электрическую цепь управления трехпозиционного двухлинейного золотника, а гидрореле установлено на сливном трубопроводе после трехпозиционного двухлинейного золотника.
W
1в
фиг.2
53
4fi
+ 36
фиг.З
| Устройство для сборки и затяжки резьбовых соединений | 1984 |
|
SU1269984A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Система управления гидравлическим гайковертом | 1986 |
|
SU1375435A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
