Изобретение относится к области промышленной робототехники и является дальнейшем усовершенствованием роботов с внешними магнитными системами, которые входят в состав электроприводов роботов.
Роботы с внешними магнитными системами известны, описаны, например в [1], их применение дает возможность резкого улучшения массогоборитных показателей привода.
Наиболее близким к заявляемому по совокупности существенных признаков является промышленный робот, содержащий поворотную платформу с электроприводами, которые установлены в блоке, причем электродвигатели имеют общий цилиндрический индуктор (статор), между полюсами которого в концентрическом зазоре расположены якори электродвигателей [2].
Недостатком данного устройства является малая интенсивность процесса теплоотдачи с якорей привода в случае применения дополнительной внешней вентиляции, нагнетающей теплоноситель /воздух/ в воздушный зазор внешних магнитных систем. Это происходит из-за неупорядоченного канала, воздушного зазора, наличия многих аэродинамических сопротивлений, острых поворотов потока, меняющимся расстоянием от вентилятора до блока якорей в процессе поворота основания. Данное обстоятельство не позволяет в полной мере обеспечить надежное охлаждение якорей в процессе работы. В свою очередь это приводит к ограничению тока нагрузки, что негативно сказывается на интенсификации процесса манипулирования, снижает производительность робототехнического комплекса, оснащенного данным роботом.
Изобретение направлено на интенсификацию теплоотдачи якорей электродвигателей, повышение тока и, следовательно, на повышение производительности робота.
Это достигается тем, что промышленный робот, содержащий поворотное основание с блоком якорей и приводами, статор с зазором, в котором помещается блок якорей, при этом поворотное основание снабжено кожухом с выступом, причем выступ расположен в зоне отсутствия якорей.
Достижение технического результата - повышения интенсивности теплоотдачи достигается за счет оптимизации потока воздуха, устранения потерь на трение вследствие аэродинамического сопротивление воздушного тракта.
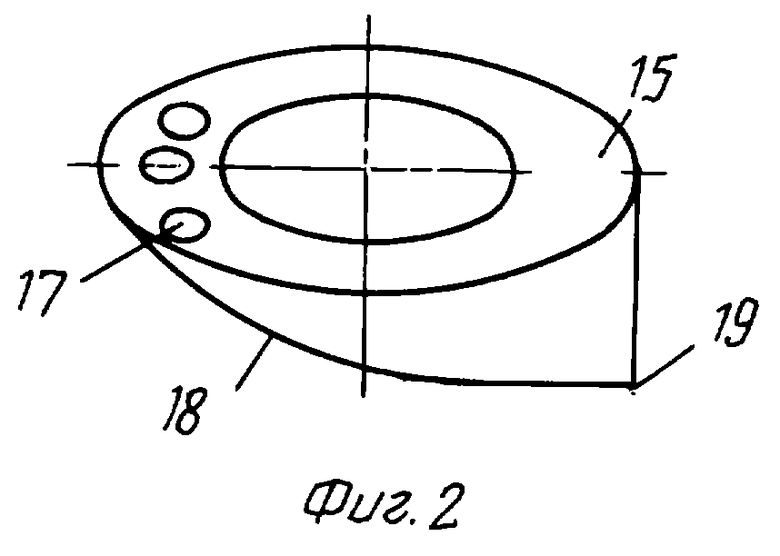
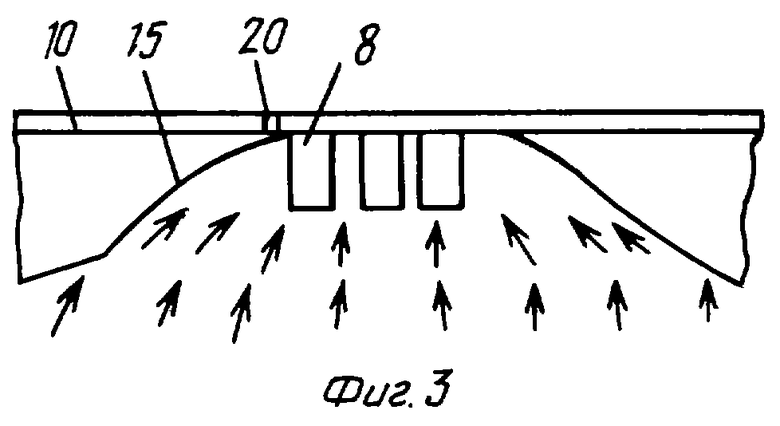
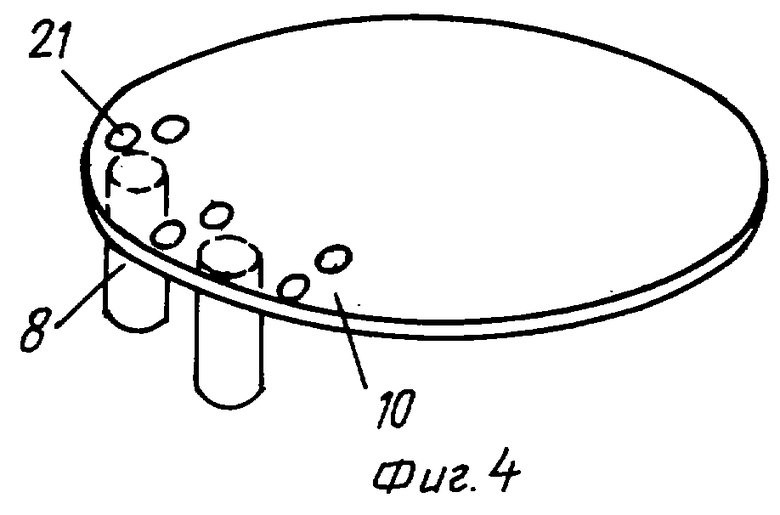
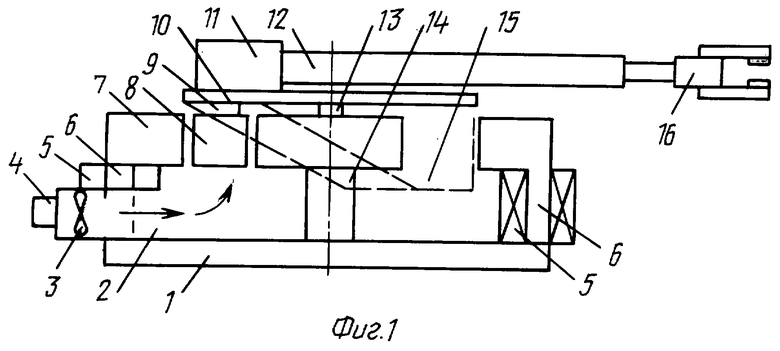
Сущность изобретения иллюстрируется чертежом, где на фиг.1 изображен заявленный робот, поперечный разрез в сечении, на фиг.2 изображен общий вид в двумерной проекции направляющего кожуха, на фиг.3 показана развертка схемы охлаждения и схема работы направляющего кожуха, на фиг.4 показано вращающееся основание с вентиляционными отверстиями.
Промышленный робот содержит основание I, на нем установлены воздухопроходящие каналы 2, в которых установлены вентиляторы 3 принудительной вентиляции с приводом 4. Между каналами имеются катушки 5 с сердечниками 6 и полюсными наконечниками 7. В зазоре между полюсными наконечниками находятся якори 8 приводов с щелочно-коллекторными узлами 9, расположенными у консольно закрепленных якорей. Робот имеет подвижное вращающееся основание 10, на нем закреплены якори и редукторы приводов. На рисунке показан один привод 11 - привод выдвижения руки 12. Основание вращается относительно оси 13, установленной на центральном стержне 14. Пунктиром показан направляющий кожух 15, расположенный в зоне между внутренним и внешним полюсными наконечниками, сверху эта зона ограничена подвижным основанием 10, а снизу – неподвижным основанием I. Робот имеет захватное устройство 16, осуществляющее захват детали.
Робот может иметь несколько приводов, каждый со своим якорем, то есть кожух 15 имеет несколько мест крепления 17 якорей приводов. Направляющие полоски 18 кожуха имеют наклон от мест крепления 17 якорей к выступу 19. Основание 10 снабжено отверстиями 20 для выхода охлаждающего воздуха.
Работа устройства. На чертеже показан привод выдвижения руки 12, включающий редуктор 11, вращаемый ротором 8, находящимся в поле наконечников 7. Поле возбуждается катушками 5. Другие приводы, например привод поворота, привод подъема, имеют аналогичную структуру и на чертеже не показаны. Для интенсификации процесса теплообмена с поверхности якорей предусмотрено наличие вентиляторов 3. Привод 4, вращая вентилятор 3, нагнетает воздух в герметизированную полость внутри магнитной системы. Воздух, направляясь плоскостями 18 кожуха 15, выходит в зазор между основанием 10, якорями 8 и наконечниками 7. Кроме того, могут быть предусмотрены и отверстия 20, выполненные в основании 10. Выступающая часть кожуха - выступ 19 находится выше воздухопроводящих каналов 2 и поэтому при любом угле поворота платформы не препятствует обдуву якорей двигателей 8.
Таким образом, к месту установки вентилятора 3 не предъявляется особых требований. Воздух из любого места, где расположен вентилятор, направляемый плоскостями 18 кожуха, омывает токопроводящие части якорей 8, отнимает у них тепло, и нагретый, выбрасывается через щели и отверстия 20. Выступ 19 расположен в зоне отсутствия якорей, то есть справа относительно оси 13, что показано на фиг.1.
Технико-экономическими преимуществами заявленного изобретения являются:
1. 3а счет направленного потока воздуха интенсифицируется теплообмен с поверхности якоря за счет повышения скорости обдува.
2. Улучшение теплообмена позволяет поднять уровень нагрузок на току якоря.
3. Увеличение тока якоря соответственно увеличивает и уровень момента двигателя.
4. Повышение уровня момента позволяет интенсифицировать процесс манипулирования без увеличения массы и габаритов привода робота.
5. Интенсификация процесса манипулирования, например уменьшение времени цикла, позволяет увеличивать производительность робота, который входит в состав робото-технического комплекса.
6. Направляющий кожух выполняется из легкого, технологичного материала, например пластмассы.
7. В случае не группового, а равномерного расположения якорей по окружности подвижного основания, допустимо размещение нескольких идентичных кожухов в целях унификации.
Источники информации
1. Литвиненко А.М. Электроприводы промышленных роботов с внешними магнитными системами. - Воронеж: Издательство ВГУ, 1989. - 160 с.
2. А.С. СССР №1342723 /А.М.Литвиненко - Промышленный робот/ опубл. Б.И. №37, 1987. В 25 J 11/00, з-ка №4076643/31-08 от 20.06.86.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОМЫШЛЕННЫЙ РОБОТ | 2003 |
|
RU2248270C1 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ЧЕРВЯЧНЫЙ ПРИВОД | 2001 |
|
RU2204068C2 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Промышленный робот | 1989 |
|
SU1684022A1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
Изобретение относится к области промышленной робототехники и может быть использовано при проектировании роботов с внешними магнитными системами. Сущность изобретения заключается в том, что поворотное основание промышленного робота снабжено кожухом с выступом. При этом выступ расположен в зоне отсутствия якорей. Технический результат изобретения состоит в повышении производительности робота. 4 ил.
Промышленный робот, содержащий поворотное основание с блоком якорей и приводами, статор с зазором, в котором размещен блок якорей, отличающийся тем, что поворотное основание снабжено кожухом с выступом, причем выступ расположен в зоне отсутствия якорей.
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Привод робота-манипулятора | 1988 |
|
SU1576308A1 |
| US 4557660 A, 10.12.1985 | |||
| DE 3340946 A, 23.05.1985 | |||
| Гидропривод бурильной машины | 1980 |
|
SU910997A1 |

