Изобретение относится к электротехнике, в частности к электроприводам, обеспечивающим требуемое натяжение и линейную скорость движения обрабатываемого материала в процессе его перемотки.
Цель изобретения - упрощение и повышение эксплуатационной надежности.
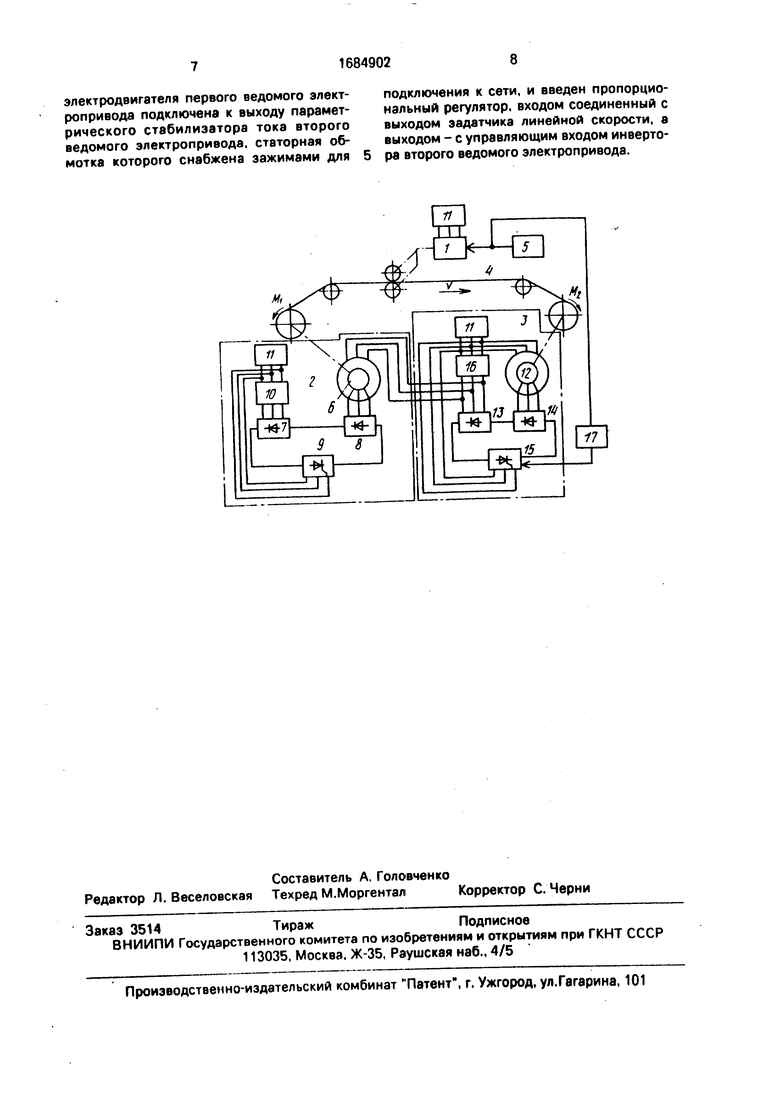
На чертеже представлена функциональная схема электропривода.
Электропривод содержит ведущий электропривод 1 и первый 2 и второй 3 ведомые электроприводы, выходные валы которых связаны через обрабатываемый материал 4. К входу ведущего электропривода 1 подключены выход задатчика 5 линейной скорости. Ведомые электроприводы 2 и 3 выполнены по типу асинхронно-вентильного каскада.
Первый ведомый электропривод 2 содержит асинхронный двигатель 6 с фазным ротором, в цепи которого последовательно включены по цепи постоянного тока неуправляемые выпрямители 7 и 8 и инвертор 9. Выводы переменного тока неуправляемого выпрямителя 7 соединены с выходом стабилизатора 10 тока, снабженного входами для подключения к сети 11. Второй ведомый электропривод 3 содержит асинхронный двигатель 12 с фазным ротором, в цепь роторной обмотки которого последовательно
о
ОЭ
4 Ю О
ю
включены по цепи постоянного тока неуправляемые выпрямители 13 и 14 и инвертор 15. Выводы переменного тока выпрямителя 13 соединены с выходом стзбализатора 16 тока, снабженного входом для подключения к сети 11. Инверторы 9 и 15, ведущий электропривод 1,обмотка статора асинхронного двигателя 12 снабжены выводами для подключения к сети 11. Обмотка статора асинх- ронного двигателя 6 первого ведомого электропривода 2 подключена к выходу параметрического стабилизатора 16 второго ведомого электропривода.
Электропривод снабжен пропорциональным регулятором 17, выход которого соединен с управляющим входом инвертора 15 в ооторной цепи второго ведомого электропривода 3. Вход пропорционального регулятора 17 соединен с выходом задат- чика 5 линейной скорости.
Электропривод работает следующим образом.
При включении питания напряжение сети 11 подается на входные зажимы ведущего электропривода 1, задающего линейную скорость V движения материала 4, и ведомых электроприводов 2 и 3. Управляющее напряжение на выходе задатчика 5 скорости равно нулю. При этом вращающий момент на валу электропривода 1 отсутствует и линейная скорость V движения материала также равна нулю. Вращающие моменты Mi и М2 возникают на валах ведомых электроприводов 2 и 3 и направлены в противоположные стороны, тем самым создавая натяжение материала. Обрабатываемый материал 4 находится в натянутом состоянии и остается неподвижным в случае, если тянущие усилия со стороны электроприводов 2 и 3 уравновешивают друг друга Тянущие усилия определяются величинами вращающих моментов Mi и М2 электроприводов 2 иЗ.
Известно, что электроприводы 2 и 3 работают в режиме источника момента.
Момент Mi электропривода 2 определяется величиной тока параметрического стабилизатора 10 тока и величиной тока, ответвляющегося в статорные обмотки двигателя 6 от параметрического стабилизатора 16 тока.
Момент М2 электропривода 3 определяется напряжением, приложенным к статор- ным обмоткам двигателя 12, и величиной тока, ответвляющегося в роторную цепь двигателя 12 от параметрического стабилизатора 16 тока.
Распределение тока параметрического стабилизатора тока 16 между статорными обмотками двигателя 6 электропривода 2 и
роторными обмотками двигателя 12 элект- роприводва 3 может быть получено из следующей системы уравнений:
ф 16 ф с2 Нф р 3
11ф с 2 1ф с 2 Zc.3;
Udu15 11ф с 2 + Udp3 83.
где |ф 16 - фазный ток на выходе параметрического стабилизатора 16 тока;
1фс2 фазный ток, ответвляющийся в 0 статорные обмотки двигателя 6 электропривода 2;
1фрЗ фазный ток, ответвляющийся в роторную цепь двигателя 12 электропривода 3;
5Уф с 2 фазное напряжение, возникающее на статорных обмотках двигателя 6 электропривода 2;
Zcs полное эквивалентное сопротивление фазы статора двигателя бэлектроприво- 0 да 2;
Uduis значение выпрямленного напряжения на входе инвертора 15;
Ud с 2 - значение выпрямленного напряжения на выходе неуправляемого мостового 5 выпрямителя 13;
Udp3 - значение выпрямленного напряжения на выходе неуправляемого мостового выпрямителя 14 при 5з 1;
5з - текущее значение скольжения дви- 0 гателя 12 электроприовда 3 Тогда
5з
.UdM15 dp з
ф с 2 „ . 7Н
Јс э
5
0
0
I- I ,r Udn15 -Udp3 S3
|ф с з - ф 16rf-у ;
1Чи t-c э
Анализ выражений для токов 1фс2 и 1фрЗ показывает, что распределение тока параметрического стабилизатора 16 тока мэжду статорными обмотками двигателя 6 электропривода 2 и роторными обмотками двигателя 12 электропривода 3 определяется соотношением выпрямленного напряжения на входе инвертора 15 и выпрямленного напряжения на выходе неуправляемого мостового выпрямителя 14.
Таким образом, установкой фиксированного угла управления инвертором добиваются равновесного состояния тянущих усилий со стороны ведомых электроприводов 2 и 3. При этом величина натяжения устанавливается с помощью регулирования выходного тока параметрического стабили- зэтора 16 тока.
Линейная скорость V движения материала 4 задается с помощью эадатчика 5 скорости. Напряжение управления с выхода задатчика 5 скорости подается на управляющий вход электропривода 1. На валу электропривода 1 возникает вращающий момент, который приводит в движение материал 4 с заданной линейной скоростью. При этом происходит разгон двигателей б и 12 электроприводов 2 и 3. По мере разгона изменяется величина скольжения 5з двигателя 12 электропривода 3. При этом напряжение управления с выхода задатчика 5 скорости подается на управляющий вход инвертора 15 через пропорциональный регулятор 17, изменяя фиксированный угол управления так, чтобы соотношение выпрямленного напряжения на входе инвертора 15 и выпрямленного напряжения на выходе неуправляемого мостового выпрямителя 14 оставалось неизменным. Тем самым поддерживается равновесие тянущих усилий в процессе разгона электропривода. После разгона при установившейся и равной заданной линейной скорости материала 4 в начале перемотки радиус рулона на валу двигателя ведомого электропривода 2 максимальной, а его частота вращения минимальна. На валу двигателя 12 ведомого электропривода 3 радиус рулона минимальный, а его частота вращения максимальна. Ведомые сетью инверторы 9 и 15 работают при фиксированных углах управления, при этом угол управления инвертором 15 такой, что эквивалентное сопротивление цепи выпрямленного тока ротора двигателя 12 ведомого электропривода 3 больше эквивалентного сопротивления обмоток статора двигателя 6 ведомого электропривода 2. Поэтому в ротор двигателя 12 ведомого электропривода 3 в начале перемотки ответвляется минимальный ток параметрического стабилизатора тока 16, и на его валу создается минимальный момент, а в статор двигателя 6 ведомого электропривода 2 ответвляется максимальный ток, и на валу его двигателя 6 возникает максимальный момент.
По мере перемотки обрабатываемого материала радиус рулона на валу ведомого электропривода 2 уменьшается, а радиус на валу ведомого электропривода 3 увеличивается. При этом частота вращения двигателя 6 ведомого электропривода 2 увеличивается, а частота вращения двигателя 12 ведомого электропривода 3 уменьшается. Уменьшение частоты вращения двигателя 12 ведомого электропривода 3 приводит к увеличению выпрямленной ЭДС ротора на выходе мостового выпрямителя 14. Поэтому эквивалентное сопротивление роторной цепи ведомого электропривода 3 по отношению к выходным зажимам параметрического стабилизатора 16 тока уменьшается, а ток, ответвляющийся в роторную цепь ведомого электропривода 3, увеличивается. В то же время ток, ответвляющийся в статор двигателя 6 ведомого электропри- вода 2, уменьшается. Это приводит к требуемому перераспределению выходного тока параметрического стабилизатора 16 тока между статором двигателя ведомого электропривода 2 и ротором двигателя ведомого
электропривода 3, а следовательно, и к соответствующему изменению моментов асинхронных двигателей 6 и 12 ведомых электроприводов 2 и 3 при изменении радиусов рулонов в процессе перемотки, вследствие чего и поддерживается натяжение материала 4.
Выполнение ведомых электроприводов по типу асинхронного вентильного каскада с последовательным соединением преобразователя и параметрического стабилизатора тока в цепи выпрямленного тока ротора в каждом позволяет обеспечить поддержание требуемого натяжения обрабатываемого материала в разомкнутой системе и
тем самым значительно упростить систему управления электроприводом в целом,а использование в электроприводе асинхронных двигателей и параметрических стабилизаторов тока позволяет повысить его
надежность. Кроме того, снижается трудоемкость изготовления, монтажа и наладки электропривода.
Формула изобретения
Электропривод, содержащий ведущий
и два ведомых электропривода с валами, связанными между собой обрабатываемым материалом, задатчик линейной скорости, выход которого соединен с управляющим
входом ведущего электропривода с силовым входом для подключения к сети, отличающийся тем, что, с целью упрощения и повышения эксплуатационной надежности, каждый из ведомых электроприводов
выполнен по типу асинхронно-вентильного каскада с параметрическим стабилизатором тока и преобразователем, выполненным в виде последовательно соединенных по цепи постоянного тока двух неупраоляемых выпрямителей и инвертора с выводами для подключения к сети, выводы переменного тока одного неуправляемого выпрямителя соединены с выводами обмотки ротора асинхронного двигателя данного ведомого
электропривода, а выводы переменного тока второго неуправляемого выпрямителя - с выходом параметрического стабилизатора тока этого же ведомого электропривода. снабженного входом для подключения к сети, статорная обмотка асинхронного
электродвигателя первого ведомого элект-подключения к сети, и введен пропорциоропривода подключена к выходу парамет-нэльный регулятор, входом соединенный с
рического стабилизатора тока второговыходом эадатчика линейной скорости, а
ведомого электропривода, статорная об-выходом - с управляющим входом инвертомотка которого снабжена зажимами для5 ра второго ведомого электропривода.

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1990 |
|
SU1725360A1 |
| Электропривод переменного тока | 1985 |
|
SU1272463A1 |
| Электропривод переменного тока | 1987 |
|
SU1501242A2 |
| Способ управления асинхронным двигателем с фазным ротором | 1989 |
|
SU1723652A1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| НАГРУЖАЮЩЕЕ УСТРОЙСТВО СТЕНДА ДЛЯ ИСПЫТАНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1991 |
|
RU2032889C1 |
| Электропривод переменного тока | 1986 |
|
SU1379933A2 |
Изобретение относится к электротехнике и может быть использовано в электроприводах для перемотки обрабатываемого материала. Целью изобретения является упрощение и повышение эксплуатационной надежности. С этой целью в электроприводе каждый из ведомых электроприводов 2, 3 выполнен по типу асинхронно-вентильного каскада с асинхронными двигателями 6, 12 с фазовыми роторами, неуправляемыми выпрямителями 7, 8 и 13. 14, инверторами 9.15 и параметрическими стабилизаторами 10, 16тока в цепях роторов асинхронных двигателей 6, 12 соответственно. Обмотка статора асинхронного двигателя подключена к выходу параметрического стабилизатора 10 тока. В электропривод введен пропорциональный регулятор 17, входом соединенный с выходом задатчика линейной скорости, а выходом - с управляющим входом инвертора 15. В электроприводе обеспечивается поддержание требуемого натяжения обрабатываемого материлаа 4 в разомкнутой системе, снижается трудоемкость изготовления, монтажа и наладки электропривода. 1 ил. (Л С
Mi
| Многодвигательный электропривод агрегата | 1958 |
|
SU130093A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Многодвигательный электропривод поточной линии | 1986 |
|
SU1432715A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР N 1184065, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
