Ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Роботизированный технологический комплекс | 1986 |
|
SU1430234A1 |
| Фрезерно-расточной станок модульного типа | 2022 |
|
RU2797896C1 |
| СПОСОБ ТОКАРНОЙ И/ИЛИ ФРЕЗЕРНОЙ ОБРАБОТКИ РОТОРОВ ТУРБИН И КРУПНОГАБАРИТНЫХ ВАЛОВ | 2015 |
|
RU2606689C2 |
| ТОКАРНЫЙ СТАНОК | 1992 |
|
RU2008127C1 |
| ТОКАРНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 2019 |
|
RU2727133C1 |
| Многооперационный станок | 1979 |
|
SU933372A1 |
| Токарный многоцелевой станок | 1985 |
|
SU1282962A1 |
| Агрегатный обрабатывающий центр | 1984 |
|
SU1255394A1 |
| Токарный многоцелевой станок | 1988 |
|
SU1576241A1 |
| КОМПЛЕКС ДЛЯ ОБРАБОТКИ РАДИУСНЫХ ПОВЕРХНОСТЕЙ КРУПНОГАБАРИТНЫХ ЛИСТОВЫХ ЗАГОТОВОК | 2007 |
|
RU2360770C2 |
Изобретение относится к станкостроению и имеет своей целью повышение производительности работы роботизированного технологического комплекса Устройство содержит станки 1,4,5, 6. установленные на общей продольной станине 8 Торцеобраба- тывающий станок 1 оснащен тисками 10, устройствами 2, 3 смены инструмента, патроном 11, центрлм 12 п инструментом 13. Станки 4, 5, 6 предназначены для попарной обработки Заготовка 9 трамспоотир/ется захватом руки 29 портальною рг5ота7. 5 ил.
Изобретение относится к машиностроению и может быть использовано в автоматических линиях.
Целью изобретения является пооыше- ние производительности.
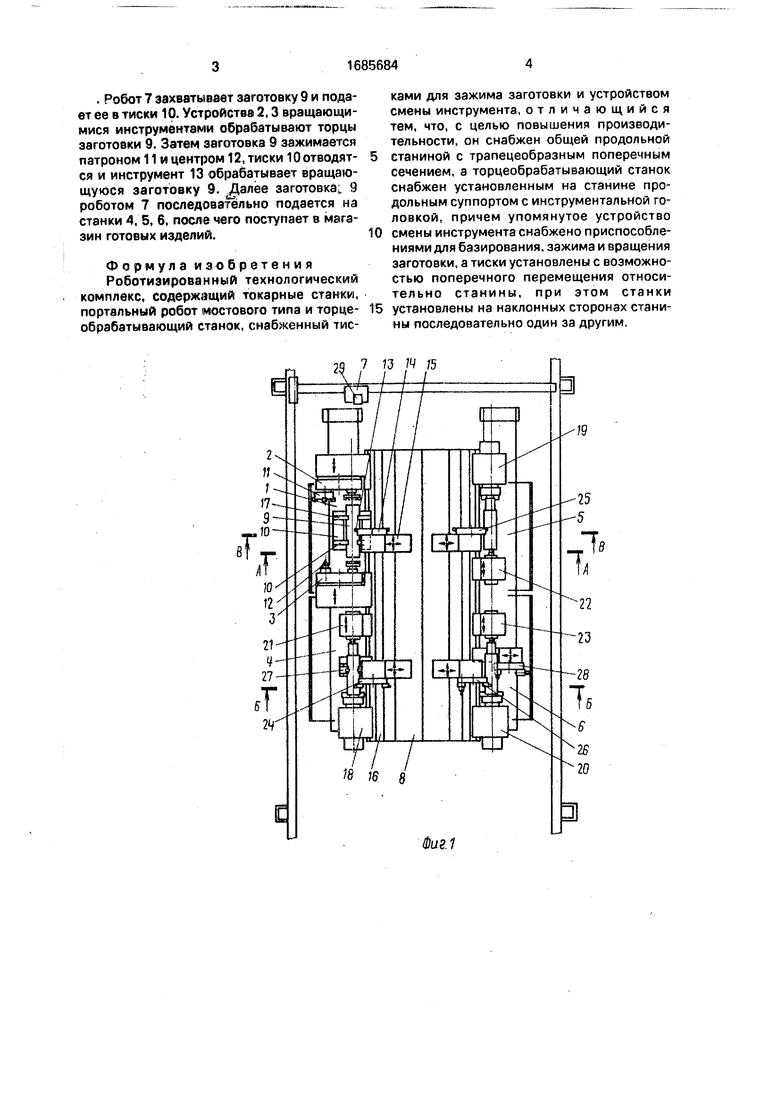
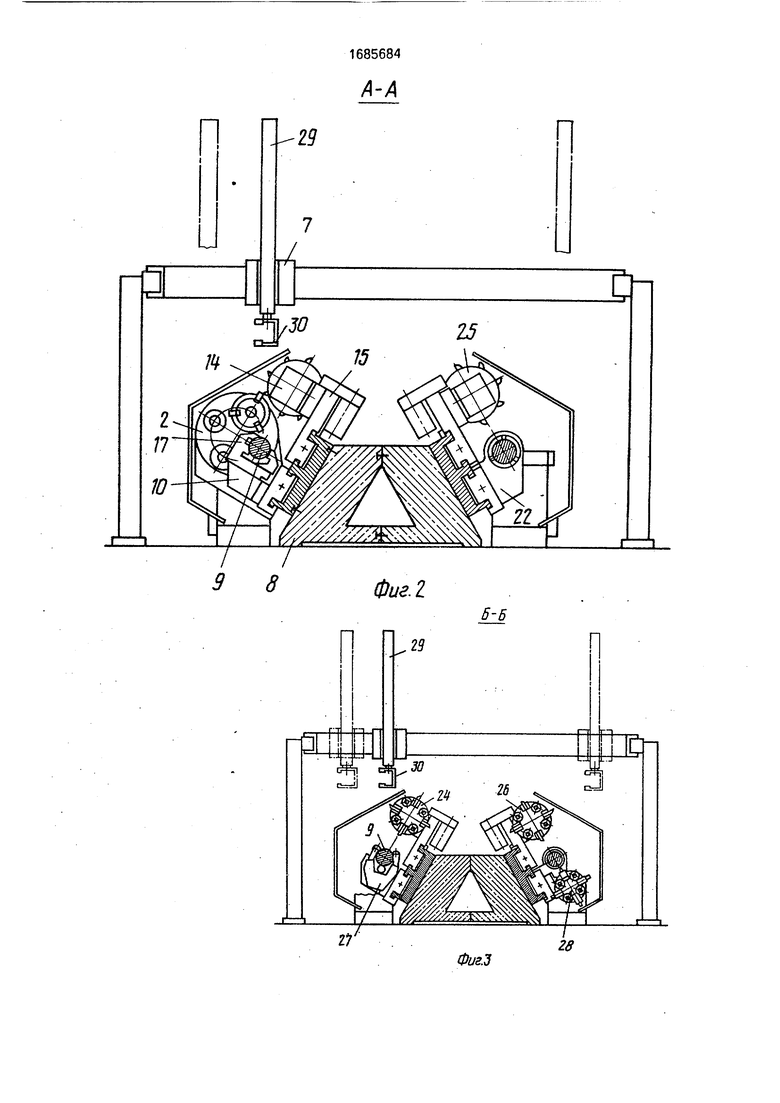
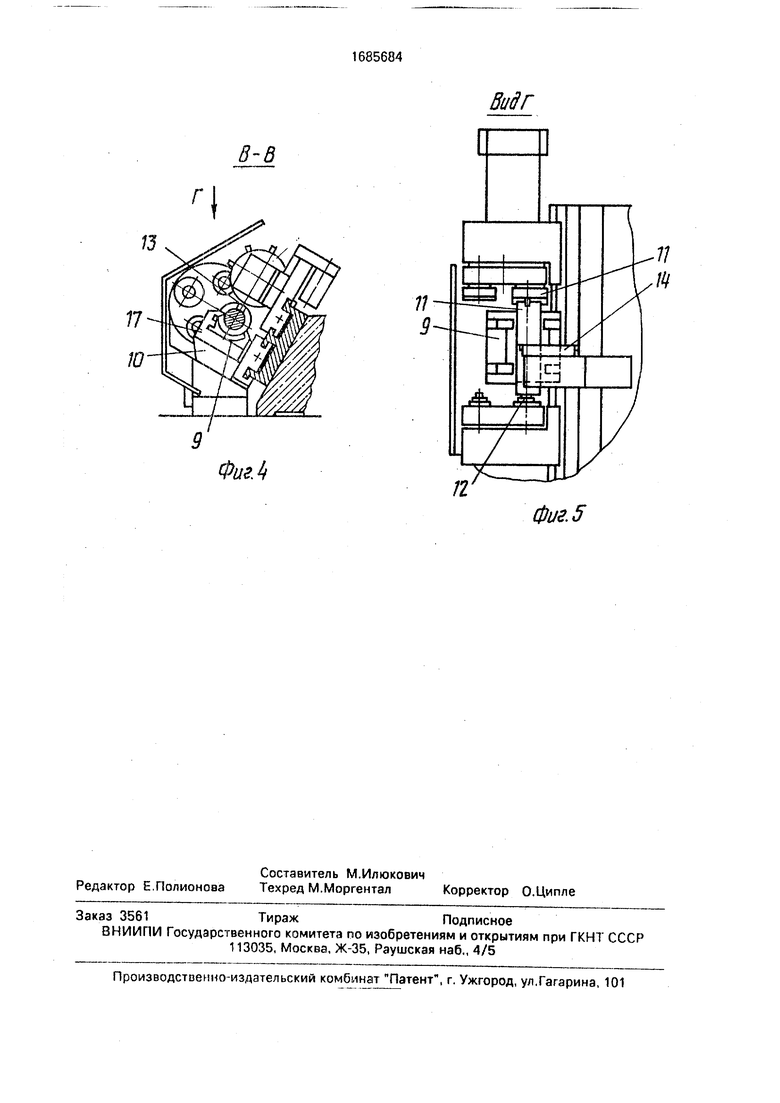
На фиг.1 показан комплекс, вид сверху, на фиг.2 - разрез по А-А на фиг.1; на фиг.З - разрез по Б-Б на фиг.1; на фиг.4 - разрез по В-В на фиг.1; на фиг.5 - вид по стрелке Г на фиг.4.
РобО(ИЗированный комплекс содержит торцеобрабатывающий станок 1 с устройствами 2, 3 смены инструмента, токарные станки 4, 5, 6 и портальный робот 7 мосго- ього типа. Станки 1,4,5,6 установлены на общей продольной станине 8. Заготовки 9 первоначально закрепляется в тисках 10 На устройствах 2, 3 смены инс/грумента соответственно установлены патрон 11 и центр 12 для последующею базирования, зажима и вращения заготовки 9. Торцеобра батывающий станок 1 снабжен инструментом 13, закрепленным в инструментальной головке 14 крестовою суппорта 15 перемещающегося по направляющим 16 Устройства 2, 3 смены инструмента перемещаются по продольным направляющим 16 а тиски 10 после разжатия губок 17 перемещаются вниз. Токарные станки 4, 5 б оснащены шпиндельныму бабками 18, 19,20 задними бабками 21, 22, 23. верхними суппортами с инструментальными головками 24 25, 26 и сьемными узлами - люнетом 27 и нижним суппортом с инструментальной головкой 28 Робот 7 оснащен рукой 29 с захватом 30
Роботизированный технологический комплекс работает следующим образом
10
со ел
О
2
. Робот 7 захватывает заготовку 9 и подает ее в тиски 10. Устройства 2,3 вращающимися инструментами обрабатывают торцы заготовки 9. Затем заготовка 9 зажимается патроном 11 и центром 12, тиски 10отводятся и инструмент 13 обрабатывает вращающуюся заготовку 9. алее заготовка;. 9 роботом 7 последовательно подается на станки 4, 5, 6, после чего поступает в магазин готовых изделий.
Формула изобретения
Роботизированный технологический
комплекс, содержащий токарные станки,
портальный робот мостового типа и торцеобрабатывающий станок, снабженный тис
нами для зажима заготовки и устройством смены инструмента, отличающийся тем, что, с целью повышения производительности, он снабжен общей продольной станиной с трапецеобразным поперечным сечением, а торцеобрабатывающий станок снабжен установленным на станине продольным суппортом с инструментальной головкой, причем упомянутое устройство смены инструмента снабжено приспособлениями для базирования, зажима и вращения заготовки, а тиски установлены с возможностью поперечного перемещения относительно станины, при этом станки установлены на наклонных сторонах станины последовательно один за другим.
2Б 20
Э
Фиг. 7
ж3
-У
US
J
2ЭПФ
V-V
f89S89l
Г
Фие.Ь
ВидГ
фиг. 5
| Роботизированные комплексы, разработанные в СССР и ЧССР | |||
| Каталог ВНИИ- ТЭМР, М., - 1985, с.22, модель АСВР -01 |
