15
25
Изобретение относится к станкостроению.
Цель изобретения - повышение надежности станка в работе путем исключения сложных конструктивных элементов при одновременном повышении производительности g за счет использования новых инструментальных комплектов.
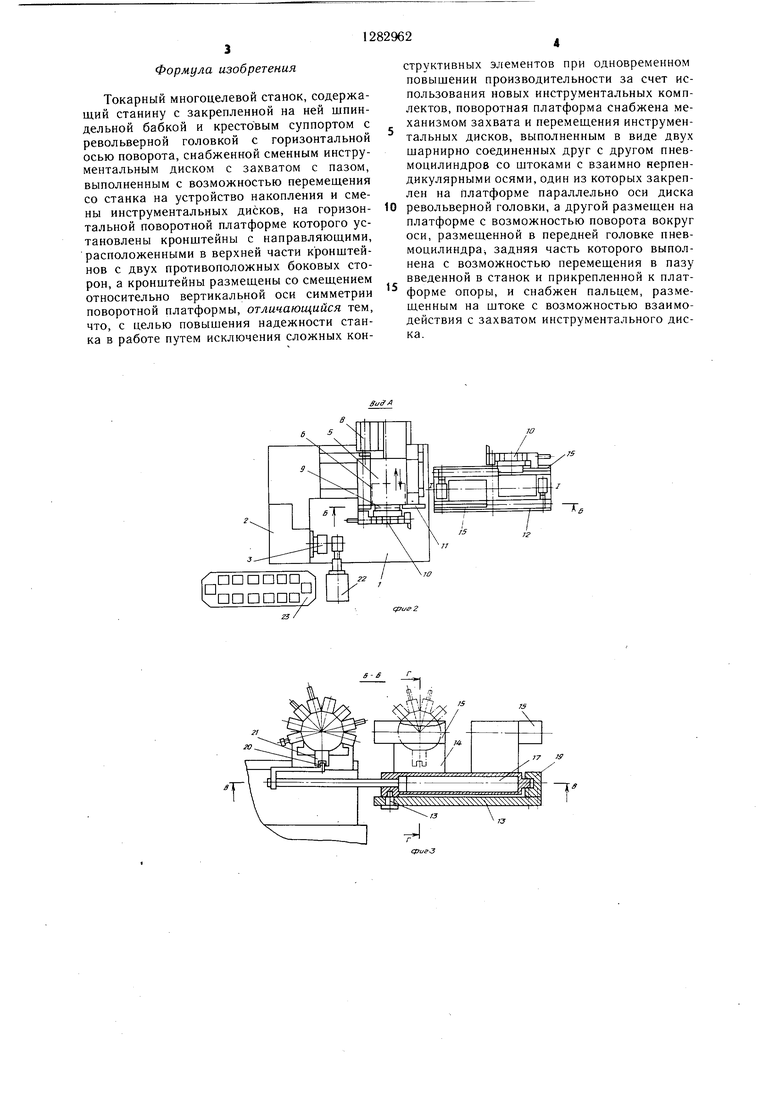
На фиг.1 изображен предлагаемый станок, вид спереди; на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.З; на фиг.5 - сечение Г-Г на фиг.З.
Станок содержит станину 1 с закрепленной на ней шпиндельной бабкой 2 с патроном 3 для закрепления обрабатываемых деталей, продольный суппорт 4 и поперечные салазки 5 с револьверной головкой 6 с горизонтальной осью поворота. На салазках сбоку смонтирован привод 7 враш.ения сверлиль- но-фрезерного инструмента с отдельным двигателем 8.
Револьверная головка б имеет Т-образ- 20 ную подвижную направляюшую 9, обеспечи- ваюш,ую закрепление на револьверной головке сменного инструментального диска 10, выполненного с пазом для перемешения по направляющей 9.
На салазках также закреплена дополнительная Т-образная горизонтальная направ- ляюш,ая 11 для перемешения инструментального диска с револьверной головки на устройство 12 накопления и смены инструментальных дисков (в дальнейшем накопителе).
Накопитель 12 стоит на фундаменте отдельно от станка и представляет собой горизонтальную.поворотную платформу 13, на которой установлены два кронштейна 14 с Т-образными направляющими 15 для установки и перемещения инструментальных дис- ,г ков 10, причем кронштейны установлены так, что направляющие 15 на каждом из кронштейнов 14 расположены в верхней части с двух противоположных боковых сторон, а кроипп ейны смещены относительно вертикальной плоскости симметрии платформы со- 40 ответственно в сторону размещения направляющих.
В нижней части кронштейнов 14 со стороны размещения направляющих расположен механизм захвата и перемешения инструментальных дисков 10, который выполнен в виде 2-х шарнирно соединеннь1х друг с другом с помощью оси пневмоцилиндров, один из которых 1 6 жестко закреплен на кронштейне 14, а - 17 имеет возможность
поворота в ГОрИЗОНГа.ЧЬНОЙ плоскости вокруг JQ
оси 18, расположенной в передней головке цилиндра 17. При этом задняя головка цилиндра имеет ипчможность перемещения в Г1-образпом пазу опоры 19, что необходимо для улучшения условий работы оси 18.
30
45
Станок имеет устройство смены обрабатываемых деталей, робот 22 и тактовый стол 23.
Станок работает следующим образом.
По команде с ЧПУ робот 22 производит загрузку обрабатываемых деталей с тактового стола 23 в зажимной патрон 3. Обработка детали осуществляется инструментом, закрепленным на инструментальном диске 10 за счет перемещения продольного суппорта 4 и поперечных салазок 5.
Необходимый инструмент устанавливают в рабочую позицию за счет поворота револьверной головки б с закрепленным на ней инструментальным диском 10.
При необходимости автоматической замены инструмента суппорт 4 перемещается по станине в крайнее правое положение, а поперечные салазки 5 - в крайнее заднее положение.
При этом Т-образные направляющие 11 и 15 на салазках 5 и кронщтейне 14 соответственно совпадают. Одновременно револьверная головка поворачивается в позицию смены инструментального диска, и Т-образная направляющая 9 занимает горизонтальное положение, совпадая с направляющими 11 и 15. При подаче давления (например сжатого воздуха) в бесштоковую полость цилиндра 16 выдвигается шток последнего и поворачивает цилиндр 17 вокруг оси 18.
Затем подается давление в бесштоковую полость цилиндра 17 и выдвигается его шток с пальцем 20 до установки его напротив паза захвата 21 инструментального диска. Обратным ходом штока цилиндра 16 возвращается в первоначальное положение цилиндр 17, и палец 20 входит в захват 21 диска 10, при этом цилиндр 17 занимает положение, параллельное Т-образным направляющим для перемещения инструментального диска 10.
При осевом перемещении Т-образной направляющей 9 осуществляется раскрепление инструментального диска на револьверной головке 6.
Далее обратным ходом штока цилиндра 17 палец 20 перемещает инструментальный диск 10 револьверной головки на накопитель 12 и производит удержание диска на накопителе во время вращения платформы 13.
Платформа 13 накопителя поворачивается вокруг своей вертикальной оси на 180° на следующую позицию. Цикл загрузки инструментального диска с накопителя на станок происходит в обратном порядке.
Предлагаемый станок позволяет повыНа штоке пневмоцилиндра 17 установлен 55 сить надежность работы без дополнительных
палец 20, взаимодействующий в позиции смены с П-образным захватом 21 инструментального диска 10.
передаточных устройств и производительность обработки путем использования новых инструментальных комплектов.
5
5
0
г 0
Q
0
5
Станок имеет устройство смены обрабатываемых деталей, робот 22 и тактовый стол 23.
Станок работает следующим образом.
По команде с ЧПУ робот 22 производит загрузку обрабатываемых деталей с тактового стола 23 в зажимной патрон 3. Обработка детали осуществляется инструментом, закрепленным на инструментальном диске 10 за счет перемещения продольного суппорта 4 и поперечных салазок 5.
Необходимый инструмент устанавливают в рабочую позицию за счет поворота револьверной головки б с закрепленным на ней инструментальным диском 10.
При необходимости автоматической замены инструмента суппорт 4 перемещается по станине в крайнее правое положение, а поперечные салазки 5 - в крайнее заднее положение.
При этом Т-образные направляющие 11 и 15 на салазках 5 и кронщтейне 14 соответственно совпадают. Одновременно револьверная головка поворачивается в позицию смены инструментального диска, и Т-образная направляющая 9 занимает горизонтальное положение, совпадая с направляющими 11 и 15. При подаче давления (например сжатого воздуха) в бесштоковую полость цилиндра 16 выдвигается шток последнего и поворачивает цилиндр 17 вокруг оси 18.
Затем подается давление в бесштоковую полость цилиндра 17 и выдвигается его шток с пальцем 20 до установки его напротив паза захвата 21 инструментального диска. Обратным ходом штока цилиндра 16 возвращается в первоначальное положение цилиндр 17, и палец 20 входит в захват 21 диска 10, при этом цилиндр 17 занимает положение, параллельное Т-образным направляющим для перемещения инструментального диска 10.
При осевом перемещении Т-образной направляющей 9 осуществляется раскрепление инструментального диска на револьверной головке 6.
Далее обратным ходом штока цилиндра 17 палец 20 перемещает инструментальный диск 10 револьверной головки на накопитель 12 и производит удержание диска на накопителе во время вращения платформы 13.
Платформа 13 накопителя поворачивается вокруг своей вертикальной оси на 180° на следующую позицию. Цикл загрузки инструментального диска с накопителя на станок происходит в обратном порядке.
Предлагаемый станок позволяет повы5 сить надежность работы без дополнительных
передаточных устройств и производительность обработки путем использования новых инструментальных комплектов.
Формула изобретения
структивных элементов при одновременном повышении производительности за счет использования новых инструментальных комплектов, поворотная платформа снабжена механизмом захвата и перемещения инструментальных дисков, выполненным в виде двух шарнирно соединенных друг с другом пнев- моцилиндров со штоками с взаимно нерпен- дикулярными осями, один из которых закреплен на платформе параллельно оси диска
Токарный многоцелевой станок, содержа- ш,ий станину с закрепленной на ней шпиндельной бабкой и крестовым суппортом с револьверной головкой с горизонтальной осью поворота, снабженной сменным инструментальным диском с захватом с пазом, выполненным с возможностью перемешения со станка на устройство накопления и смены инструментальных дисков, на горизон- Ю револьверной головки, а другой размеш,ен на тальной поворотной платформе которого ус-платформе с возможностью поворота вокруг
тановлены кронштейны с направляющими, оси, размещенной в передней головке пнев- расположенными в верхней части к ронштей-моцилиндра задняя часть которого выполнов с двух противоположных боковых сто- нена с возможностью перемещения в пазу рон, а кронштейны размещены со смещением введенной в станок и прикрепленной к плат- относительно вертикальной оси симметрии поворотной платформы, отличающийся тем, что, с целью повыщения надежности станка в работе путем исключения сложных конформе опоры, и снабжен пальцем, размещенным на штоке с возможностью взаимодействия с захватом инструментального диска.
структивных элементов при одновременном повышении производительности за счет использования новых инструментальных комплектов, поворотная платформа снабжена механизмом захвата и перемещения инструментальных дисков, выполненным в виде двух шарнирно соединенных друг с другом пнев- моцилиндров со штоками с взаимно нерпен- дикулярными осями, один из которых закреплен на платформе параллельно оси диска
револьверной головки, а другой размеш,ен на платформе с возможностью поворота вокруг
нена с возможностью перемещения в пазу введенной в станок и прикрепленной к плат-
форме опоры, и снабжен пальцем, размещенным на штоке с возможностью взаимодействия с захватом инструментального диска.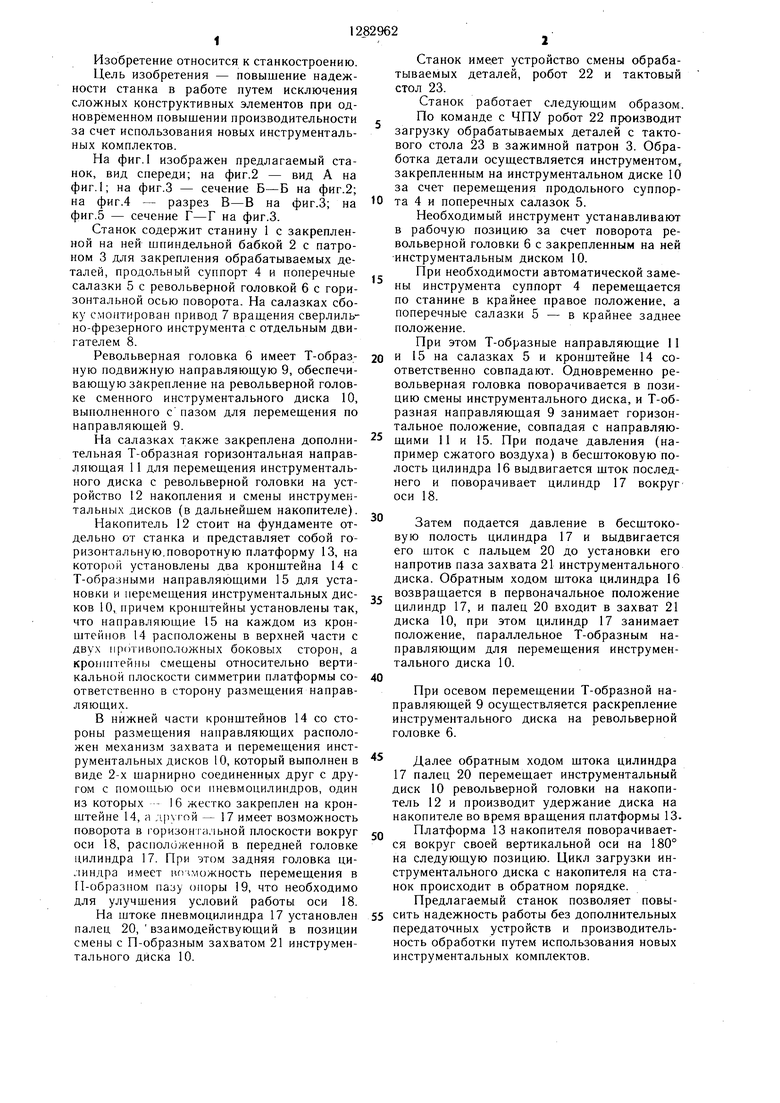
| название | год | авторы | номер документа |
|---|---|---|---|
| Токарный многоцелевой станок | 1988 |
|
SU1576241A1 |
| Устройство для автоматической смены инструмента | 1974 |
|
SU500009A1 |
| Револьверная головка сверлильно-фрезерно-расточного станка | 1984 |
|
SU1168342A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ КОЛЕСНЫХ ПАР | 1992 |
|
RU2011475C1 |
| Устройство для смены инструментов на дыропробивном прессе | 1987 |
|
SU1642948A3 |
| Гибкий производственный модуль автоматической линии | 1985 |
|
SU1456297A1 |
| Автоматизированный комплекс | 1990 |
|
SU1808644A1 |
| Токарный станок с автоматической сменой инструмента | 1975 |
|
SU588098A1 |
| Станок для обработки шеек крупногабаритных коленчатых валов | 1975 |
|
SU572369A1 |
| СУППОРТ ТОКАРНО-РЕВОЛЬВЕРНОГО АВТОМАТА | 1973 |
|
SU405646A1 |

Изобретение относится к области станкостроения. Целью изобретения является повышение надежности станка в работе путем упрощения конструкции при одновременном повышении производительности за счет использования новых инструментальных комплектов. Цри смене инструментального диска 10 с изношенным инструментом суппорт 4 перемеш,ается в крайнее правое положение, а поперечные салазки - в крайнее заднее положение. Одновременно револьверная головка поворачивается в позицию смены, а Т-образные направляюш,ие головки суппорта и кронштейна 14 совпадают. Движением штока цилиндров происходит захват диска 10 и перемещение его на накопитель 12. После поворота платформы 13 на 180° происходит перемеш,ение диска 10 с новыми инструментами на станок. 5 ил. с (Л Ю 00 Ю со О5 ND лз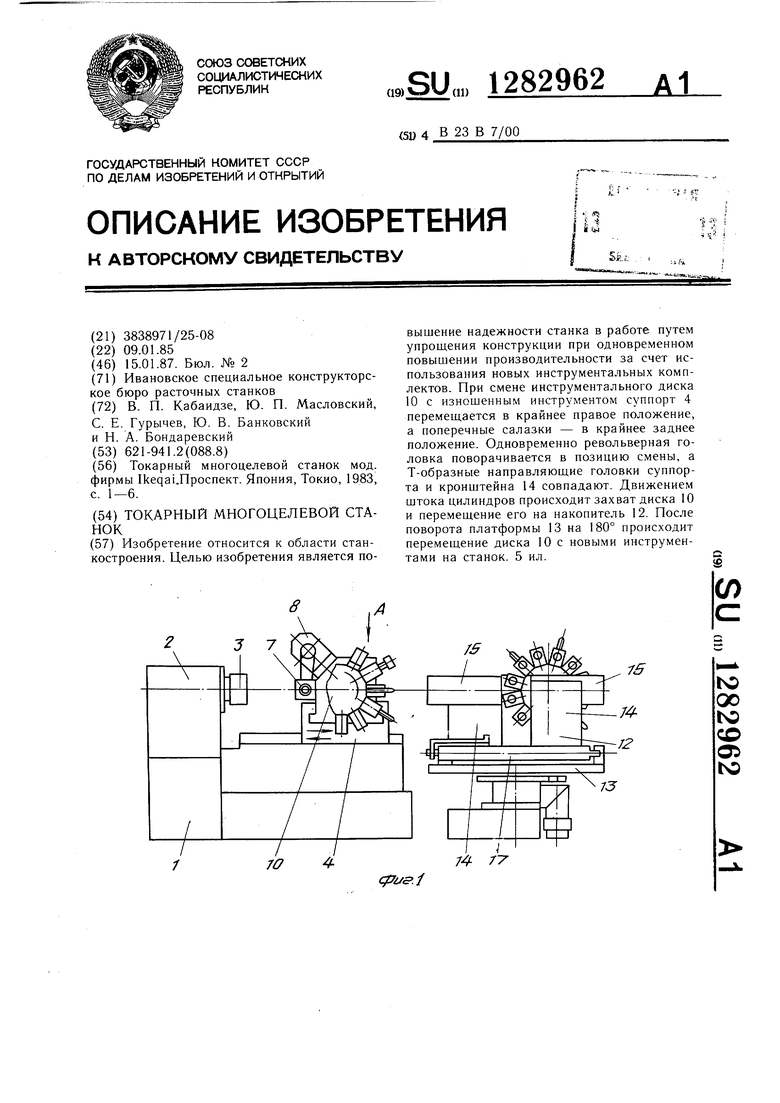
ПППППП
DDDDDD/J Т/
Т
qfrufZ
ff- ff
20
фас.476
Г- Г
cpL/.5
Составитель Ю. Ельчанин
Техред И. ВересКорректор М. Самборская
Тираж 972, Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Токарный многоцелевой станок мод | |||
| фирмы Ikeqai.npocneKT | |||
| Япония, Токио, 1983, с | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
