СО
О
to
со
Изобретение относится к машиностроению и может быть использовано для создания роботизированных комплексов в разных областях народного хозяйства.
Целью изобретения является расипфение технологических возможностей комплекса.
На фиг. 1 изображен комплекс, вид в плане; на фиг. 2 - автоматический кулачковый патрон, общий вид.
Многооперационный роботизированный технологический комплекс содержит промышленный робот 1, ос ацествляюш.ий загрузку токарного станка 2, устройство управления 3 промышленным роботом и устройство управления 4 токарным станком, накопитель 5 для дета.аей, магазин 6 для схва- тов промышленного робота и магазин 7 для режущего инструмента, расположенные в зо- i;e действия руки нро.мышленного робота 1.
На станине токарного станка 2 неподвижно смонтирована передняя бабка 8, оспап,енная шпинделем 9, связанным с дат- чиком углового перемещения 10 шпинделя передней бабки 8.
На нтинделе 9 установлен автоматический кулачковый патрон 11.
На станине станка 2 с возможностью перемеп1ения в продольном и поперечном направления.х установлен суппорт 12, несу- п|ий приводимую во вращение полым валом 13 от электродвигателя 14 инстру- мепта.льпу о оловку 15.
Допо.чпительный автоматический кулач- ковый патрон 16 смонтирован соосно с нолым валом 13, кинематически связанным с датчиком углового перемещения 17 инструмен-. тальпой головки.
Автоматические кулачковые патроны 11 и 16 содержат (фиг. 2) корпус 18 с зажи- маюпщми деталь 19 кулачками 20, пере- .меп1ак) гюсрелство.м рычажного .механизма 21 переме1 ония кулачков, связанного с нентрально/ тягой 22, располагае.мой в по.лости нш.ииде.чя 9 передней бабки 8 и ана- ;ю1 нчно в нолостп вала 13 суппорта 12.
На кулачка.х 20 неподвижно закреплены фиксаторы 23, выполненные со CKOHICH- нымп иовер.хностями 24, контактирующими с обратной конусной поверхностью 25 зажи- .мао(1го рг/кущего инструмента 26.
Б корпусе указанных автоматических кулачковых патронов 11 и 16 выполнено центральное отверстие 27 для базирования режуп1его инструмента 26.
Многооперационный роботизированный те.хнологический комплекс работает следую- щим образом.
Нри поступлеп; I ..|. от устройства управления 3 роботом па начало работы промышленный робот 1 .захватывает деталь 19 из накопителя ч;:готовок 5 и устанавливает ее в .; втоматический кулачко- вый иатрон 1 1 Н1пинд.-:я 9 токарного станка 2. Но сигналу от устройства управления 4 станка 2 aвт(JЛiarпчecкий кхмачковый
0
5
5
0
5
зо
35
д5
50
55
40
njTpoi-i li ;;ажимает детал) 19 ;: при.ходит во вран.енне. Суппорт 12 начинает гюреме- щаться в направлении к дста. 1И, производя обработку детали 19 с одной стороны.
Информация о действительном положе- нп1 инструментальной головки 15 в каждый момент времени вырабатывается датчиком углового перемещения 17 и поступает на устройство управления 4 станка 2, где сравнивается со значением, предусмотренным программой. Иосле выполнения очередного перехода инструментальная головка 15 устанавливается в такое положение-, нри котором в зоне резания оказывается соответствующий следующему переходу ре- жун1ий инструмент.
По окончании обработки детали 19 с одной стороны врац.1ение шпинделя 9 прекращается, суппорт 12 перемещается в попе- речно.м направлении до тех нор, пока ось дополнительного автоматического кулачкового патрона 16 суппорта 12 не совпадет с линией центров токарного станка 2. Носле этого путем продольной подачи суппорта 12 дополнительный автоматический кулачковый натрон 16 подводится к детали 19, зажатой в авто.матическо.м кулачковом патроне I 1 передней бабки 8, и зажимает .деталь 19, после чег о автоматический патрон 11 разжи.мается. (лппорт 12 отводится в исходную позицию, а промьппленный робот 1 п о сигналу устройства управления 3 перемещает руку к .магазину схватов и производит за.мену схватов, нри это.м за.ме- няемый схват устанавливается в одну из свободных ячеек .магазина 6, а в руку робота 1 устанавливается новый схват, предназначенный для удержания режущего инструмента 26.
Затем промышленный робот 1 берет необходимый режущий инструмент из магазина 7 для режущего инструмента и устанавливает его в центральное отверстие 27 автоматического кулачкового патрона 11,после чего режущий инструмент 26 зажимается скошенны.ми новерхностя.ми 24 фиксаторов 23.
Если необходимо выполнить токарные операции, то в автоматический кулачковый патрон 11 устанавливается резец. При этом шпиндель 9 неподвижен, а полый вал 13 приводится во вращение.
Аналогичные движения выполняются при сверлении и растачивании отверстий, совпадающих с осью детали 19. Если необходимо просверлить отверстие, не совпадающее с осью детали 19, или отфрезеровать плоскость на детали 19, то щпин- дель 9 приводится во вращение, .а полый вал 13 фиксируется.
Формула изобретения
Роботизированный технологический комп леке, включающий токарный станок, содержащий шпиндельную бабку с автоматическим кулачковым патроном и суппорт, несущий приводимую во вращение полым валом от электропривода инструментальную головку и установленный с возможностью продольного и поперечного перемещений, промышленный робот, устройство управления станком и роботом, накопитель для
заготовок и магазин для режуп смо инструмента, отличающийся тем, что, с нелыо распшрения технологических возможностс, инструментальная головка снабжен;; допол нительным автоматическим ку, 1ачковым патроном, смонтированным соосно с полым налом с возможностью совмещения его оси с осью патрона шпиндельной бабки.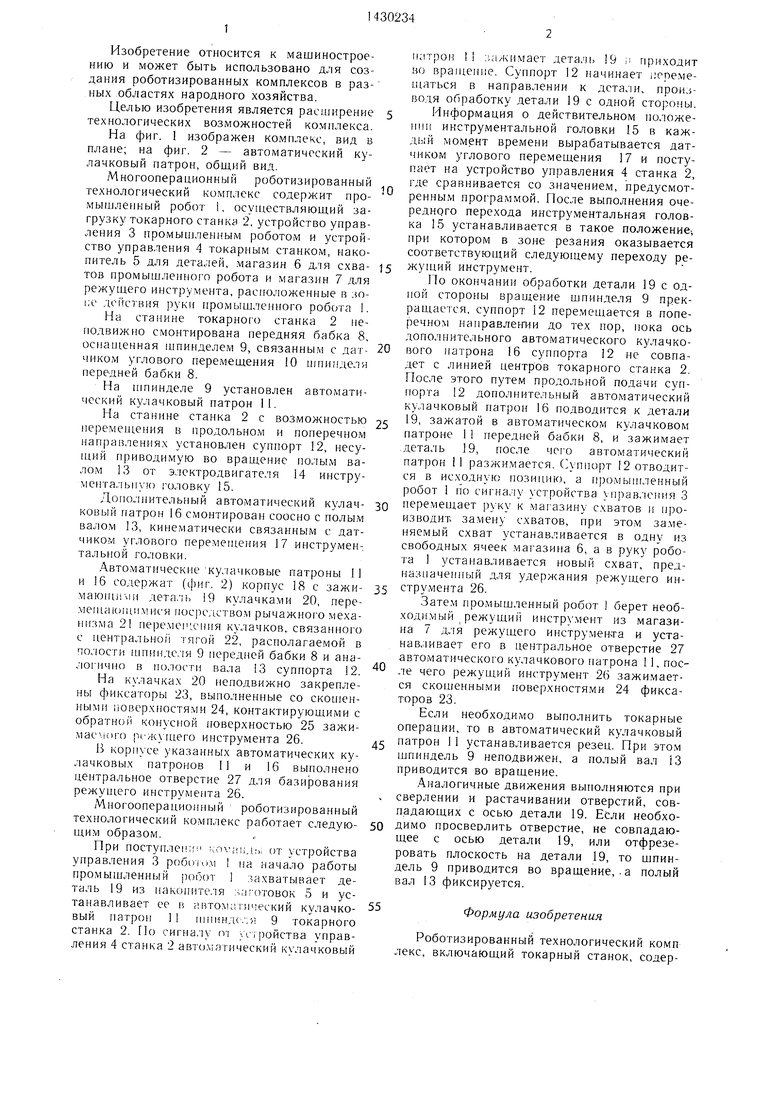
| название | год | авторы | номер документа |
|---|---|---|---|
| Переналаживаемая роботизированная система | 1981 |
|
SU998097A1 |
| Агрегатный обрабатывающий центр | 1984 |
|
SU1255394A1 |
| Гибкий производственный модуль | 1989 |
|
SU1660938A1 |
| Многооперационный станок | 1987 |
|
SU1454653A1 |
| Гибкий токарный модуль | 1987 |
|
SU1509228A1 |
| Роботизированный технологический комплекс | 1989 |
|
SU1685684A1 |
| ТОКАРНЫЙ ОБРАБАТЫВАЮЩИЙ ЦЕНТР | 2019 |
|
RU2727133C1 |
| Токарный роботизированный технологический комплекс | 1985 |
|
SU1291291A1 |
| Роботизированный технологический комплекс | 1985 |
|
SU1294601A1 |
| СПОСОБ ТОКАРНОЙ И/ИЛИ ФРЕЗЕРНОЙ ОБРАБОТКИ РОТОРОВ ТУРБИН И КРУПНОГАБАРИТНЫХ ВАЛОВ | 2015 |
|
RU2606689C2 |
Изобретение относится к машиностроению и может быть использовано для создания роботизированны.х комплексов в раз- ны.х областях народного хозяйства. Целью изобретения является расширепие технологических возможностей комплекса. Нро.мьиилен- ный робот 1 захватывает деталь 19 из нако- 1П1теля 5 заготовок и стар1а вливает ее в автоматический кулачковый патрон 11 шпинделя 9 токарного станка 2. Суппорт 2 пере- меп1ается в направлении к детали 19, производя ее обработку с одной стороны. После окончания обработки детали 19 с одной стороны суппорт 12 перемец.1ается в попереч- ,ном направлении до совмещения оси дополнительного кулачкового патрона 16 с осью патрона И, затем осуп1ествляется продольная подача суппорта 12 для подвода патрона 16 к детали 19, которая зажимается им и разжи.мается в патроне 11. Происходит пере.хват дета, 1и 19 и отвод суппорта 12 от передней бабки 8. Тем временем робот 1 производит замену схватов, установленных в магазине 6, захват режу- шего инструмента из магазина 7-и установку его в иатрон 11. По окончании выполнения описанны.х операций производится обработка детали 19 с другой стороны. 2 ил.
(ри.2
| Токарная обработка и автоматизация | |||
| Проспект фирмы «ЭМАГ. |
