Изобретение относится к гидравлическому приводу, управляемому электрическими средствами, и может найти применение в объемном гидравлическом приводе с регулируемым гидронасосом и регулируемым гидромотором (гидродвигателем).
Цель изобретения - повышение надежности и долговечности за счет обеспечения оптимальных динамических процессов.
На фиг. 1 изображена функциональная схема устройства; на фиг. 2 - схема функционального преобразователя; на фиг. 3 - семейство амплитудно-частотных характеристик гидропривода при изменении жесткости аккумулятора, показывающих влияние этой жесткости на показатель колебательности М.
Устройство (фиг. 1) содержит регулируемый гидронасос 1 с гидравлическим механизмом 2 изменения подачи и блоком 3 дистанционного пропорционального управления подачей насоса, регулируемый гидромотор 4 с гидравлическим механизмом изменения параметра регулирования гидромотора 5 и блоком 6 дистанционного пропорционального изменения параметра регулирования гидромотора ервый 7 и второй 8 блоки гидроаккумуляторов, подключенные к гидролиниям 9 и 10, соединяющим насос и гидромотор, в устройство дополнительно введены первый квадратичный функциональный преобразователь 11, второй квадратичный функциональный преобразователь 12, сумматор 13, блок 14 вычисления обратной зависимости, усилитель 15 мощности, стабилитроны 16-18 и 19-21, а блоки 7 и 8 гидроаккумуляторов содержат регулируемые дроссели 22-27, электромагниты этих дросселей 28-33 и аккумуляторы 34- 39, причем вход первого квадратичного фун- кционального преобразователя 11 соединен с входом блока 3 дистанционного пропорционального управления подачей насоса, вход второго квадратичного функционального преобразователя 12 соединен с входом блока 6 дистанционного пропорционального изменения параметра регулирования гидромотора, выходы первого 11 и второго 12 функциональных преобразователей подключены к входу сумматора 13, выход которого соединен с входом блока 14, к выходу которого через усилитель 15 мощности и стабилитроны 16-21 подключены катушки 28-33 электромагнитов регулируемых дросселей 22-27, которые соединяют аккумуляторы 34-36 блока 7 гидроаккумуляторов и аккумуляторы 37-39 блока 8 гидроаккумуляторов с гидравлическими пиниями 9 и 10.
Блок 14 (фиг. 2) содержит операционный усилитель 40 постоянного тока с большим коэффициентом усиления, в цепь обратной связи которого включен множитель 41. В устройстве управления осуществляется формирование электрических сигналов, пропорциональных квадрату параметра регулирования насоса у и квадрату параметра регулирования гидромотора у, суммирование этих сигналов и формирование сигнала управления, обеспечивающего изменение эквивалентной жесткости групп аккумуляторов, аппроксимирующее полученную оптимальную зависимость для этой жесткости.
Устройство функционирует следующим . Зразом.
На вход блока 3 подается от управляющего органа (не показан), например от зада- ющего командоаппарата с ручным управлением, задающее напряжение Uai. Блок 3 дистанционного пропорционального управления подачей насоса является электрогидравлическим преобразователем,входной величиной которого является электрическое напряжение 11з1. Выходной величиной этого преобразователя является давление управления РУ1, причем величина
давления РУ1 изменяется пропорционально значению напряжения 1)з1 на входе блока 3. Давление Pyi с выхода блока 3 поступает на вход гидравлического механизма 2 изменения подачи насоса. Этот механизм
осуществляет изменение параметра регулирования насоса ун . причем параметр регулирования насоса ун изменяется пропорционально значению давления управления Pyi, поступающего на вход гидронасоса
1 с выхода блока 3.
Следовательно, величина подачи насоса 1 и пропорциональное ему значение скорости гидромотора 4 изменяются пропорционально внешнему задающему
напряжению Uai. поступающему на вход блока 3 от постороннего источника (например, с выхода командоаппарата ручного управления).
При заданном значении подачи гидронасоса 1 скорость вращения гидромотора 4 изменяется обратно пропорционально его рабочему объему (т.е. значение расхода гидромотора за один оборот его вала), причем рабочий обьем гидромотора пропорционален параметру регулирования гидромотора уг. Значение параметра уг изменяется пропорционально внешнему задающему напряжению Уза, поступающему от управляющего органа, например от задающего командоаппарата (не показан).
Напряжение поступает на вход блока б дистанционного пропорционального изменения параметра регулирования гидромотора, при этом дэвлени управления Ру2 на выходе блока 6 изменяется пропорционально задающему напряжению 1)з2.
Давление управления РУ2 поступает с выхода блока 6 на вход гидравлического механизма 5 изменения параметра регулирования гидромотора, при этом механизм 5 осуществляет изменение параметра регулирования гидромотора УГ пропорционально давлению управления РУ2 на его входе, т.е. пропорционально задающему напряжению 1)з2 на входе блока 6
При изменениях параметра регулирования насоса } н и параметра регулирования гидромотора }г значения приведенных эквивалентных масс mi и т2 изменяются согласно зависимостям
S2
И -Рн
1
J
гп2 12
qr
где h -- момент инерции приводного электродвигателя и вращающихся деталей гидронасоса,
(2 - момент инерции механизма, редуктора и эращающихся деталей гидромоюра;
qH.РГ- номинальная удельная производительность насоса и номинальный удельный расход гидромотора;
S площадь попереиного сечения гидролинии.
При изменении параметра регулировг- ния насоса уи изменяется также эквивалентный приведенный коэффициент жесткости механической характеристики приводного электродвигателя насоса Кдэ
Кдэ Кд
Р2и
J
Я
где Кд - коэффициент жесткости механической характеристики электродвигателя на- coca.
При изменении приведенных масс mi, ГП2 и коэффициента жесткости Кдэ изменяется значение жесткости аккумулятора Сд, обеспечивающее оптимальный характер ди- намических процессов в гидроприводе.
Оптимальное значение жесткости аккумулятора Сд Сдопт (4) определяется зависимостью
Сдопт - -
кд;
2
(5)
mi (2 mi 4- ПЛ2 ) Соотношение (5) получено с помощью передаточной функции объемного гидро привода, которую, при пренебрежении демпфирую ид им влиянием утечек в гидросистеме, можно представить в виде
10
K2(Pl+Vh)P + Pb A +
+ Pi (1 + Vfo) + к2 V fl .
(6)
15
20
25
30
35
где «2 rm(mi + m2)1; ,/, - КАЭ .
WD. i
r m 1 ah
(Jk САЭ(ГГЦ + rri2Xmi-m2) . где Fr- усилие в гидросистеме;
FB внешнее возмущающее усилие, приложенное к массе гп2;
OJb - относительное значение комплексной переменной преобразования Лапласа.
В передаточной функции (6) реальные параметры гидропривода li, 2 и Кд приведены к поступательному движению рабочей жидкости в гидролинии с помощью уравнений (1), (2) и (3).
При подстановке в уравнение (6) значения Pi j Е, где Ј относительная
(Or,
частота возмущающего усилия FB, получаем уравнение амплитудно-частотной характеристики Z(t:) f(Ј):
7r,N-/ BUBf
Tr(i)--z(f)
(7)
40
45
50
где &| Кг 1рд; &2 Ј Ка: Ai K2 Vh & Уд :
(1 -t-V A-f2)Анализ показывает, что семейство характеристик по уравнению (7) для заданного значения коэффициента «2 и различных значений Vto пересекается в общей точке, имеющей координаты.
ZCO-T -.-и
-F
+ К2
(9)
Качество динамической системы объемного гидропривода характеризуется значением показателя колебательности М, который равен максимуму амплитудно-частотной характеристики по уравнению (7).
Оптимальная эквивалентная жесткость аккумулятора (4) соответствует минимально возможному значению показателя колебательности М при заданных значениях h, I2, КА, ун и уг.
Минимально возможное значение показателя колебательности М равно ординате (8) точки пересечения амплитудно-частотных характеристик (7), приведенных на фиг. 3.
Следовательно, задача определения оптимальной жесткости аккумулятора (4) сводится к определению такого значения параметра д зависящего от этой жесткости, при которой показатель колебательности М приобретает минимально возможное значение по уравнению (8).
Это значение д может быть получено в результате совместного решения уравнения (9) с уравнением
где
И
Иди KAS2
(13)
/Ь
И2 q l2 Ki S2
(14)
Напряжение Uai, пропорционально которому изменяется параметр ун , и напряжение 1)з2, пропорционально которому изменяется параметр уг, подаются в схеме фиг. 1 на входы квадратичных функциональных преобразователей 11 и соответственно.
Выходные напряжения преобразовате- л-и 11 и 12 суммируются в сумматоре 13, после чего передаются на вход блока 14.
Напряжение Uia на выходе сумматора 13 определяется уравнением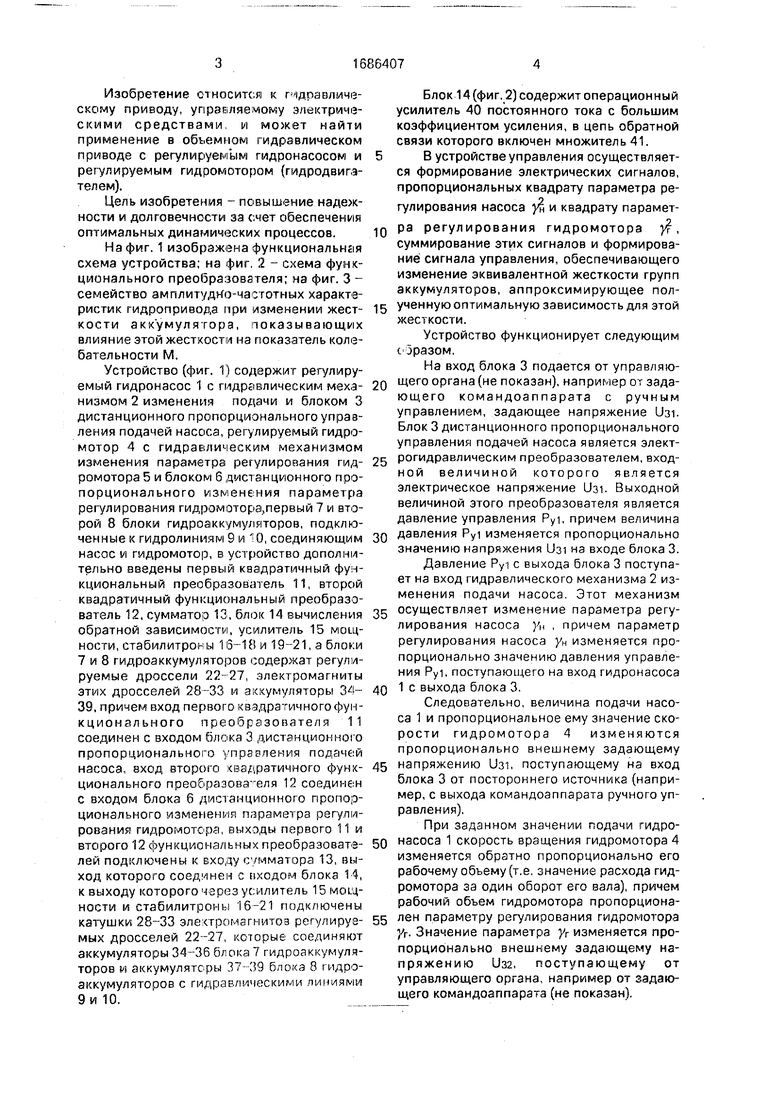

| название | год | авторы | номер документа |
|---|---|---|---|
| ЗЕМЛЕРОЙНО-ТРАНСПОРТНАЯ МАШИНА С ГИДРОСТАТИЧЕСКОЙ ТРАНСМИССИЕЙ | 2013 |
|
RU2537434C1 |
| СПОСОБ БУРЕНИЯ ПОРОДЫ С ПЕРЕМЕННЫМИ СВОЙСТВАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582691C1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| УСТАНОВКА ДЛЯ ПРОГРАММНЫХ ИСПЫТАНИЙ ТРУБЧАТЫХ | 1969 |
|
SU241777A1 |
| СПОСОБ РАБОТЫ И УСТРОЙСТВО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2240434C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2000 |
|
RU2176030C1 |
| МУФТА СЦЕПЛЕНИЯ С ПНЕВМОГИДРАВЛИЧЕСКИМ УПРУГИМ ЭЛЕМЕНТОМ | 2003 |
|
RU2294850C2 |
| СПОСОБ РЕКУПЕРАЦИИ ЭНЕРГИИ ГИДРОПРИВОДА ПОВОРОТНОЙ ПЛАТФОРМЫ ЭКСКАВАТОРА | 2016 |
|
RU2618154C1 |
| Стенд для испытаний двух объемных регулируемых гидропередач | 1986 |
|
SU1435859A1 |
| Привод управления исполнительным органом землеройной машины | 1988 |
|
SU1709037A1 |
Изобретение относится к гидравлическому приводу, управляемому электрическими средствами, и может быть использовано в объемном гидроприводе с регулируемыми насосом и гидромотором. Цель изобретения - повышение надежности и долговечности за счет обеспечения оптимальных динамических процессов. Цель достигается путем изменения эквивалентной жесткости групп аккумуляторов в функции параметров регулирования насоса и гидромотора. В устройство дополнительно введены первый 11 и второй 12 квадратичные функциональные преобразователи, сумматор 13, блок 14 вычисления обратной зависимости, усилитель мощности 15, шесть стабилитронов 16-21, а также шесть регулируемых дросселей 22-27 с электромагнитным управлением,3 ил. fe Л О оо о Јь о 4
и определяется равенством
Vfc-VbonTf-LpL
При подстановке в равенство (11) приведенных выражений для ipR д опт и К 2 получаем зависимость (5) для оптимального значения жесткости аккумулятора, обеспечивающего критерий оптимальности - минимум показателя колебательности М.
Семейство амплитудно-частотных характеристик по уравнению (7) приведено на фиг. 3.
Кривая 42 (фиг. 3) соответствует оптимальному значению pR по уравнению (11), т.е. минимальному показателю колебательности М, который согласно равенству (8) составляет
М - М - 2К2 М - ММин - -;- .
1 - К.2
Кривые 43 и 44 на фиг. 3 получены при значениях д Vto опт (кривая 43 на фиг. 3) и VA V fl опт (кривая 44 на фиг. 3). При значениях , отличающихся от оптимального, имеет место резкое возрастание показателя колебательности динамической системы М, что снижает ее надежность и долговечность.
С учетом (1), (2), (3) и (5) оптимальная жесткость аккумулятора, соответствующая минимуму показателя колебательности М динамической системы гидропривода, определяется выражением
САопт . „ 1 „ „-.(12)
jM +/
(10)
U13 AiU23i + A2U232,
(15а)
„с где Ai и АЗ - коэффициенты пропорциональности.
К входу операционного усилителя 40 подведено неизменное напряжение
30
U40 const,
к второму входу множителя 41 подведено непряжение 1Нзс выхода сумматора 13. Напряжение Ui4 на выходе 14 определяется ос уравнением
Ul4
LMo Ui3
(15b)
4Q которое, с учетом зависимости (15а), преобразуется к виду
Ui4 . „ 1 . п .(15)
/SaUSi +AU52
где Дз
Ai
- коэффициенты
пропорциональности.
Поскольку параметр ун пропорционален напряжению 1)з1, а параметр уг пропорционален напряжению 11з2, при соответствующем выборе коэффициентов /fen / 4уравнения (15), удовлетворяющих условию
А
(16)
напряжение Ui4 по уравнению (15) изменяется пропорционально оптимальной жесткости аккумулятора по уравнению (12).
Напряжение Уи через усилитель 15 мощности поступает на вход стабилитронов 16-21, к выходам которых подключены катушки электромагнитов 28-33 регулируемых дросселей 22-27, соединяющих аккумуляторы 34-36 с гидролинией 9 и аккумуляторы 37-39 с гидролинией 10. Значения напряжения пробою стабилитронов 16-21 обеспечивают кусочно-линейную аппроксимацию выше оптимальной зависимости (12) для эквивалентной жесткости аккумуляторов.
Регулируемые дроссели с электромагнитным управлением обеспечивают плавное подключение аккумуляторов к гидравлическим линиям, что исключает появление гидравлических ударов в гидросистеме.
Формула изобретения
Устройство адаптивного управления объемным гидравлическим приводом, содержащее регулируемый гидронасос, гидравлический механизм изменения подачи, блок дистанционного пропорционального управления подачей насоса, регулируемый гидромотор, гидравлический механизм изменения параметра регулирования гидромотора, блок дистанционного пропорционального изменения параметра регулирования гидромотора, первый и второй блоки гидроаккумуляторов, первую и вторую гидролинии, причем регулируемый гидронасос и регулируемый гидромотор соединены между собой первой и второй гидролиниями, к каждой из которых под- ключей соответствующий блок гидроаккумуляторов, регулируемый гидронасос и регулируемый гидромотор связаны механически соответственно с гидравлическим механизмом изменения подачи и с гидрав-
14
лическим механизмом изменения параметра регулирования гидромотора, гидравлические входы которых подключены к гидравлическим выходам соответственно блока дистанционного пропорционального управления подачей насоса и блока дистанционного пропорционального изменения параметра регулирования гидромотора, электрические входы которых являются соответственно первым и вторым задающими входами устройства, отличающееся тем, что, с целью повышения надежности и долговечности за счет обеспечения оптимальных динамических процессов, оно дополнительно снабжено первым и вторым квадратичными функциональными преобразователями, сумматором, усилителем мощности, блоком вычисления обратной зависимости, а в состав каждого блока гид роаккумуляторов входят три аккумулятора, три стабилитрона, три регулируемых дросселя и три электромагнита регулируемого дросселя, каждый из которых связан с управляющим входом соответствующего регулируемого дросселя и катушка каждого из которых подключена к первому электроду соответствующего стабилитрона, а каждый аккумулятор через соответствующий регулируемый дроссель подсоединен к соответствующей гидролинии, причем выход усилителя мощности подключен к второму электроду каждого стабилитрона первого и второго блоков гидроаккумуляторов, вход-к выходу блока вычисления обратной зависимости, вход которого подключен к выходу сумматора, первый и второй входы которого соответственно через первый и второй квадратичные функциональные преобразователи подключены соответственно к первому и второму задающим входам устройства.
-
t®
Фиг. 3,
| Автоматизация строительных и дорожных машин | |||
| Труды ВНИИстройдормаш | |||
| Вып | |||
| Счетная таблица | 1919 |
|
SU104A1 |
| Приспособление для плетения проволочного каркаса для железобетонных пустотелых камней | 1920 |
|
SU44A1 |
| Богданович Л.Б | |||
| Гидравлические приводы | |||
| - К.: Вища школа | |||
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
| Приспособление для получения кинематографических стерео снимков | 1919 |
|
SU67A1 |
| Способ очистки нефти и нефтяных продуктов и уничтожения их флюоресценции | 1921 |
|
SU31A1 |
