t
(21) 747260/11
(22)10.10.83
(46) 30.10.91. Бюл.№ 40
(71)Специальное конструкторско-тех- нологическое бюро Главмосимжстроя при Моегорисполкоме
(72)З.А.Герасимов и В.И.Кульков
(53)621.86.061(088.8)
(56)Авторское свидетельство СССР № 117634, кл. В 66 С 1/28, 1953.
(54)ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к подъемно-транспортному оборудованию. Цель изобретения - повышение удобства в эксплуатации при захвате грузов, склонных к слипанию. Грузозахватное устройство содержит раму с шарнирно закрепленными на ней двуплечими захватными рычагами 2, механизм фиксации их положений, ползун которого выполнен ступенчатым. При этом на верхней его ступени свободно установлена обойма 6, кинематически связанная с верхними плечами рычагов 2. 4 ил.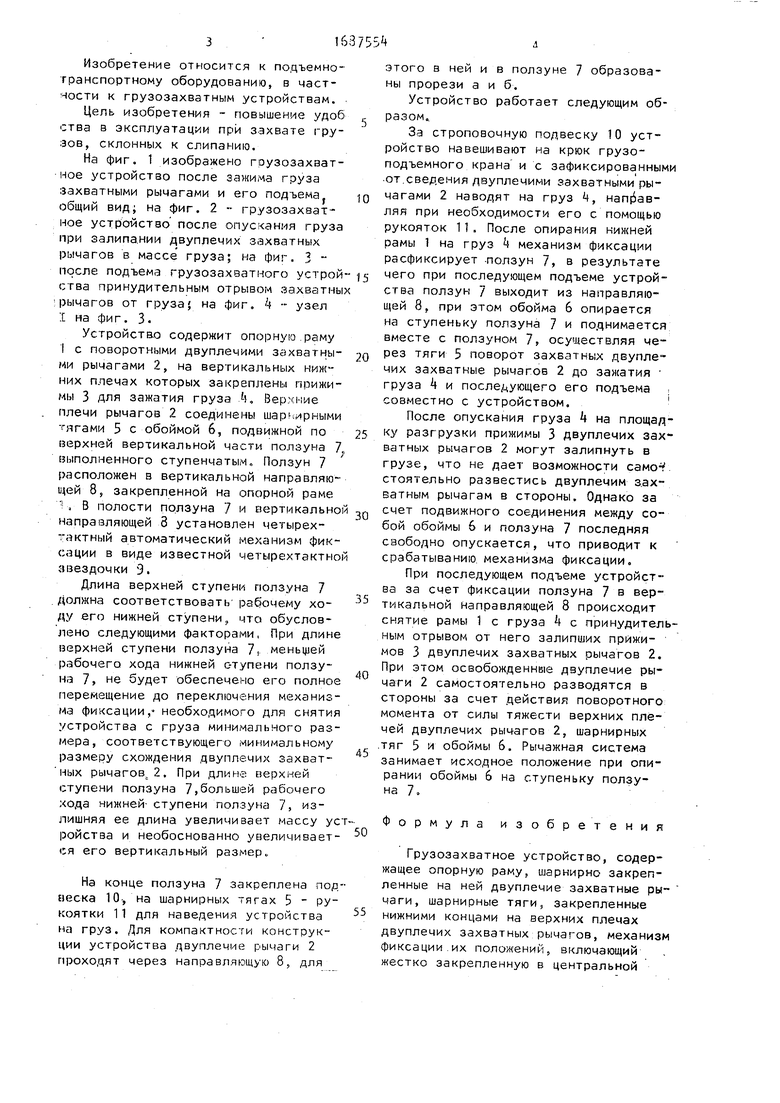
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1991 |
|
SU1789490A1 |
| Грузозахватное устройство | 1989 |
|
SU1712301A1 |
| Грузозахватное устройство | 1990 |
|
SU1744036A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1990 |
|
SU1770252A1 |
| Захватное устройство для штучных грузов | 1981 |
|
SU1065325A1 |
| Грузозахватное устройство | 1990 |
|
SU1801921A1 |
| Грузозахватное устройство | 1988 |
|
SU1581675A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1785989A1 |



(Л
11
О 00 3
ел ел
Ј
Фиг. 2
Изобретение относится к подъемно- транспортному оборудованию, в частности к грузозахватным устройствам.
Цель изобретения - повышение удоб ства в эксплуатации при захвате грузов, склонных к слипанию.
На фиг. 1 изображено грузозахватное устройство после зажима груза захватными рымагами и его подъема, общий вид; на фиг. 2 - грузозахватное устройство после опускания груза при залмпании двуплечих захватных рычагов в массе груза; на фиг. I - после подъема грузозахватного устройства принудительным отрывом захватны рычагов от груза; на фиг. k - узел I на фиг. 3.
Устройство содержит опорную раму 1 с поворотными двуплечими захватными рычагами 2, на вертикальных нижних плечах которых закреплены прижимы 3 для зажатия груза k. Верхние плечи рычагов 2 соединены шарнирными тягами 5 с обоймой 6, подвижной по верхней вертикальной части ползуна 1 выполненного ступенчатым. Ползун 7 расположен в вертикальной направляющей 8, закрепленной на опорной раме 1. В полости ползуна 7 и вертикально направляющей 3 установлен четырехтактный автоматический механизм фиксации в виде известной четырехтактно звездочки Э.
Длина верхней ступени ползуна 7 должна соответствовать1 рабочему ходу его нижней ступени, что обусловлено следующими факторами. При длине верхней ступени ползуна 7, меньшей рабочего хода нижней ступени ползуна 7, не будет обеспечено его полное перемещение до переключения механизма фиксации,- необходимого для снятия устройства с груза минимального размера, соответствующего минимальному размеру схождения двуплечих захватных рычагов 2. При длине верхней ступени ползуна 7,большей рабочего хода нижней ступени ползуна 7, излишняя ее длина увеличивает массу усройства и необоснованно увеличивается его вертикальный размер.
На конце ползуна 7 закреплена пор веска 10, на шарнирных тягах 5 РУ коятки 11 для наведения устройства на груз. Для компактности конструкции устройства двуплечие рычаги 2 проходят через направляющую 8, для
0
5
0
5
0
5
0
45
50
55
этого в ней и в ползуне 7 образованы прорези а и б.
Устройство работает следующим образом.
За строповочную подвеску 10 устройство навешивают на крюк грузоподъемного крана и с зафиксированными от сведения двуплечими захватными рычагами 2 наводят на груз 4, направляя при необходимости его с помощью рукояток 11. После опирания нижней рамы 1 на груз 4 механизм фиксации расфиксирует ползун 7, в результате чего при последующем подъеме устройства ползун 7 выходит из направляющей 8, при этом обойма 6 опирается на ступеньку ползуна 7 и поднимается вместе с ползуном 7, осуществляя через тяги 5 поворот захватных двуплечих захватные рычагов 2 до зажагия груза k и последующего его подъема совместно с устройством.
После опускания груза 4 на площадку разгрузки прижимы 3 двуплечих захватных рычагов 2 могут залипнуть в грузе, что не дает возможности самот1 стоятельно развестись двуплечим захватным рычагам в стороны. Однако за счет подвижного соединения между собой обоймы 6 и ползуна 7 последняя свободно опускается, что приводит к срабатыванию механизма фиксации.
При последующем подъеме устройства за сиет фиксации ползуна 7 в вертикальной направляющей 8 происходит снятие рамы 1 с груза 4 с принудительным отрывом от него залипших прижимов 3 двуплечих захватных рычагов 2. При этом освобожденные двуплечие рычаги 2 самостоятельно разводятся в стороны за счет действия поворотного момента от силы тяжести верхних пле- чей двуплечих рычагов 2, шарнирных тяг 5 и обоймы 6. Рычажная система занимает исходное положение при опи- рании обоймы 6 на ступеньку ползуна 7.
Формула изобретения
Грузозахватное устройство, содержащее опорную раму, шарнирно закрепленные на ней двуплечие захватные рычаги, шарнирные тяги, закрепленные нижними концами на верхних плечах двуплечих захватных рычагов, механизм фиксации их положений, включающий жестко закрепленную в центральной
части рамы вертикальную направляющую и расположенный в ней ползун, с которыми связаны верхние концы шарнирных тяг, жестко закрепленную на верхнем i конце ползуна подвеску для крюка подъемного механизма, отличающееся тем, что, с целью повыше- Г
10
ния удобства в эксплуатации при захвате грузов, склонных к слипанию, ползун выполнен ступенчатым в центральной части, а связь верхних концов шарнирных тяг с ползуном представляет собой обойму, свободно обхватывающую верхнюю ступень ползуна.
.
/
4
Фиг.З
ФигЛ
