Изобретение относится к регуляторам скорости вращения объекта и может быть использовано в приборах автоматического управления, телемеханики, в приборах записи и воспроизведения информации, оптических и вычислительных устройствах.
Цель изобретения - повышение точности регулирования скорости вращения в области низких частот дестабилизирующих воздействий.
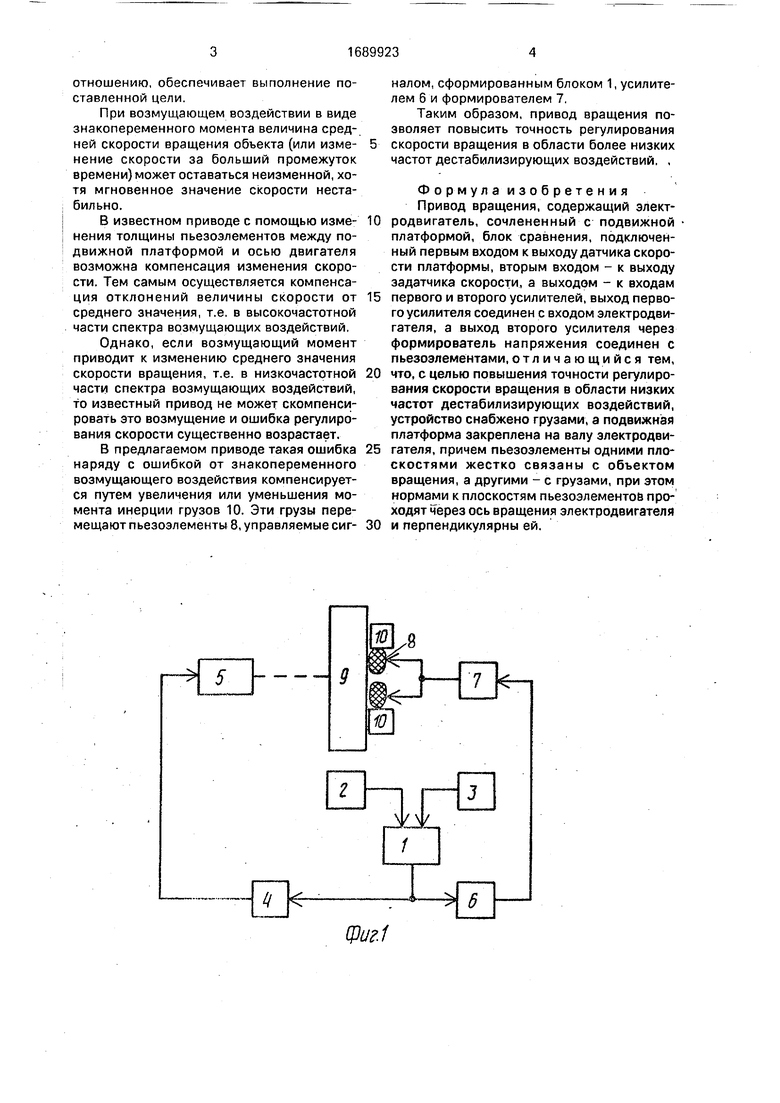
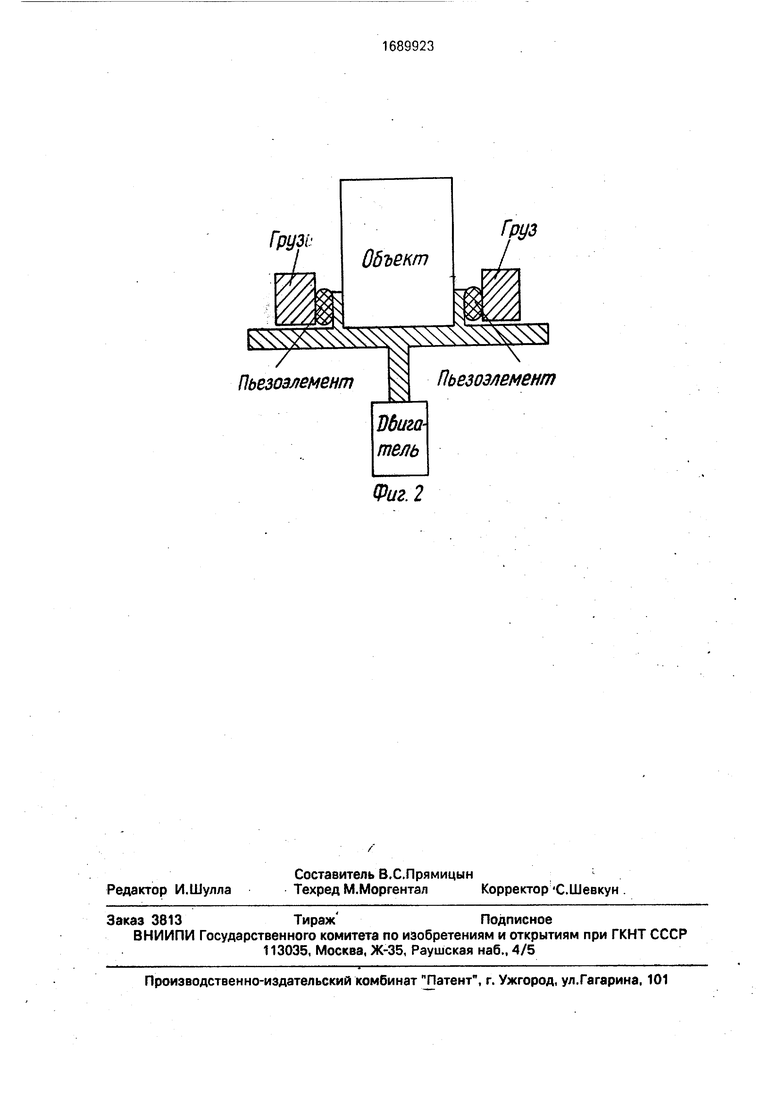
На фиг.1 приведена функциональная схема привода вращения; на фиг. 2 - схема размещения объекта вращения.
Привод вращения содержит блок 1 сравнения, датчик 2 скорости платформы, задатчик 3 скорости, усилитель 4, электродвигатель 5, усилитель 6, формирователь 7 напряжения, пьезоэлементы 8, подвижную платформу 9 и грузы 10.
Привод вращения работает следующим образом.
При стабилизации скорости вращения согласно закону сохранения кинематического момента, который вытекает из закона сохранения энергии, определяющее уравнение можно записать в виде
i(W+d,W) (+dl)W, где I - момент инерции объекта;
W - номинальная скорость вращения;
- изменение скорости вращения, под воздействием внешних моментов при постоянном моменте инерции объекта;
d I - изменение момента инерции ротора, которое может компенсировать отклонение скорости вращения.
Левая часть указанного соотношения соответствует кинетическому моменту вращающегося объекта с неизменным моментом инерции при воздействии на него внешнего возмущения, приводящего к изменению скорости вращения на величину iw. Правая часть соответствует кинетическому моменту объекта с переменным моментом инерции при воздействии того же возмущения. Выбор значения инерционных масс, параметров пьезоэлементов и канала управления, удовлетворяющих указанному со
И
О 00
о о
ю
CJ
отношению, обеспечивает выполнение поставленной цели
При возмущающем воздействии в виде знакопеременного момента величина средней скорости вращения объекта (или изме- нение скорости за больший промежуток времени) может оставаться неизменной, хотя мгновенное значение скорости нестабильно.
В известном приводе с помощью изме- нения толщины пьезоэлементов между подвижной платформой и осью двигателя возможна компенсация изменения скорости. Тем самым осуществляется компенсация отклонений величины скорости от среднего значения, т.е в высокочастотной части спектра возмущающих воздействий
Однако, если возмущающий момент приводит к изменению среднего значения скорости вращения, т.е. в низкочастотной части спектра возмущающих воздействий, то известный привод не может скомпенсировать это возмущение и ошибка регулирования скорости существенно возрастает.
В предлагаемом приводе такая ошибка наряду с ошибкой от знакопеременного возмущающего воздействия компенсируется путем увеличения или уменьшения момента инерции грузов 10. Эти грузы перемещают пьезоэлементы 8, управляемые сиг-
налом, сформированным блоком 1, усилителем 6 и формирователем 7
Таким образом, привод вращения позволяет повысить точность регулирования скорости вращения в области более низких частот дестабилизирующих воздействий, ,
Формула изобретения Привод вращения, содержащий электродвигатель, сочлененный с подвижной платформой, блок сравнения, подключенный первым входом к выходу датчика скорости платформы, вторым входом - к выходу задатчика скорости, а выходом - к входам первого и второго усилителей, выход первого усилителя соединен с входом электродвигателя, а выход второго усилителя через формирователь напряжения соединен с пьезоэлементами,отличающийся тем, что, с целью повышения точности регулирования скорости вращения в области низких частот дестабилизирующих воздействий, устройство снабжено грузами, а подвижная платформа закреплена на валу электродвигателя, причем пьезоэлементы одними плоскостями жестко связаны с объектом вращения, а другими - с грузами, при этом нормами к плоскостям пьезоэлементов проходят через ось вращения электродвигателя и перпендикулярны ей.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2650341C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2021 |
|
RU2781092C1 |
| СПОСОБ АДАПТИВНОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2565490C1 |
| Устройство для определения гравиметрической постоянной | 1972 |
|
SU499542A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
| СПОСОБ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2608081C2 |
| Электропривод постоянного тока | 1982 |
|
SU1099370A1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
Изобретение относится к регуляторам скорости вращения объектов и может быть использовано в приборах автоматического управления, телемеханике, в приборах записи и воспроизведения информации, в оптических и вычислительных устройствах. Цель изобретения - повышение точности регулирования скорости вращения в области низких частот дестабилизирующих воздействий. Для этого в привод вращения введены грузы 10, которые с помощью пье- зоэлементов 8 изменяют момент инерции подвижной платформы 9 в противофазе возмущающим воздействиям.2 ил.
фи.1
Грум
Объект
Фиг. 2
| Центробежный регулятор скорости | 1978 |
|
SU763861A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Позиционный электропривод | 1982 |
|
SU1064409A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
