Изобретение относится к электротехнике и может быть использовано в общепромьаиленных электроприводах постоянного тока, где требуется высо кая точность отработки заданной ско рости и инвариантность к возмущгиощим воздействиям, в частности в элек троприводах станков с ЧПУ. Известен электропривод постоянно го тока, содержащий последовательно соединенные первый сумматор, регулятор скорости, второй сумматор, регулятор тока, преобразователь, электро двига1 ель и датчик скорости, выход которого подключен к первому входу сумматора, датчик тока якоря, выход которого соединен с вторым входом второго сумматора t13. Недостаток этого электропривода визкая точность поддержания заданной скорости при действии внешних возмущений. Наиболее близким по технической сущности к изЬбретеиюо является . электропривод постоянного тока, содержащий электродвигатель с датчиком скорости, подключенный к преобразова телю, сумматор, первый вход которого соединен с источником задающего сигнгша, второй - с выходсж датчика скорости, а выход через релейный регулятор скорости связан с входом преобразователя. Кроме того, электропривод содержит релейный регуля;тор тока, датчик тока, датчик производной тбка и датчик ускорения. Использование двух релейных регуляторов в указанном электроприводе позволяет реёшизовать ско 1ьзящий режим (СР)управления, что повьшает Д1йяамическую точность при отработке заданной скорости. Для реализации СР в данном приводе используются дифференциаторы тока и скорости 23 Однако получить точные сигнгшы о производных тока и скорости невозможно, так как применение дифференциаторов требует включения фильтров высокочастотных пймех,. что искажает полезный сигнал на входах регулятора скорости и, в особенности, регулятора тока, вследствие чего частотапереключений регулятора тока в СР низка. Таким образом, режим работы яв,ляется автоколебательным,что приводит к колебаниям тока и скорости около их средних значений. Следовательно, недостатки известного электропривода - низкие энергетические показатели и статическая точность, Цель изобретения - повБшеиие точности и улучшение энергетических показателей электропривода постоян ного тока. Указанная цель достигается тем, что в электропривод постоянного тока содержащий электродвигатель с датчиком скорости, подключенный к преоб- разователю, сумматор, первый вход которого соединен с источником задающего сигнала, второй - с выходом датчика скорости, а выход через релейный регулятор скорости связан с входом преобразователя, введены интегратор-ограничитель , включенный между выходом релейного регулятора скорости и входом преобразователя, а также формирователь сигнала переключения, состоящий из интегратора и масштабного усилителя с тремя входами, причем выход сумматора соединен с входом интегратора и первым входом масштабного усилителя, второй вход которого соединен с выходом интегратора, третий - с выходом интегратора-ограничителя, а выход масштабного усилителя соединен с входом релейного регулятора скорости. На чертеже представлена схема устройства. Электропривод постоянного тока содержит электродвигатель 1 с датчиком 2 скорости, подключенный к преобразователю 3, сумматор 4, первый вход которого соединен с источником 5 задающего сигнала, второй - с выходом датчика скорости, а выход через релейный регулятор 6 скорости связан с входом преобразователя 3. В электропривод введены интеграторограничитель 7, включенный между выходом релейного регулятора б скорости и входом 3 преобразователя, а также формирователь 8 сигнала переключения, состоящий из интегратора 9 и масштабного усилителя 10 с тремя входами. Выход сумматора 4 соединен с входом интегратора 9 и первым входом масштабного усилителя 10, второй вход которого соединен с выходом интегратора 9, третий - с выходом интегратора-ограничителя 7, а выход масштабного усилителр 10 соединен с входом релейного регулятора б скорости. Электропривод работает следующим образом. Регулятор б скорости (релейный элемент) через интегратор-ограничитель 7 и преобразователь 3 осуществляет стабилизацию скорости двигателя 1 под действием обратной связи по скорости, сигнал которой вырабатывается датчиком 2 скорости.. На первый и второй цходы сумматора 4 поступают сигналы о текущем значении скорости п с датчика 2 скорости и сигналы, пропорциональные заданному п значению скорости, а на его выходе формируется сигнал рассогласования Лп п т п, пропорционгшьный ошибке управления, который затем интегрируется интегратором 9. Оба сформированных сигнала, а также выходное напряжение интегратора-ограничителя- 7 поступают на входы усили теля 10, на выходе которого,формиру ется сигнал переключения S, равный (пз-п|Л + К(п,, (f) где п, п - сигналы, пропорциональ ные текущему и заданному значению скорости; и - напряжение на выходе интегра тора-ограничителя ; , К - постоянные коэффициенты. Можно показать, воспользовавшись основным уравнением двигателя постоянного тока, что сигнал переключёния S в случае постоянных заданной скорости и момента нагрузки представ ляет собой линейную комбинацию сиг-, налов, пропорциональных ошибке управления, ее интегралу, первой и второй производной и постоянной величины, определяемой заданным зн чением скорости и значением момента ;нагрузки. А именно, сигнал переключения определяется выражением -s-кЬ 1 L . ( ) (3- H Vnr-/(v l-R-l-т-Г JV/jM S W k W k г/ к к K Jdndt+ IC2 -4 Mn + .Ум.,,ф, - сигналы пропорционал где m , ные моменту нагрузки двигателя я моменту нагрузки; J.- момент инерции; Т, постоянные времени двигателя ; K - коэффициент противо-ЭДС; К - коэффициент усиления преоб разователя 3. Как видно из выражения (2), функция переключения построена в соответствии с методами теории сис тем с разрывнымуправлением, в кот рых реализуются скользящие режимы управления. Действительно, при упр лении объектом п-го порядка для ор ганизации скользящего режима требу ся сформировать функцию переключен представляющую собой линейную комб нацию ошибки управления и ее произ водных до (п - 1)-го порядка 5 + C,2/J) + ...+ Cr,4)( где С, ..., С - постоянные коэффициенты;IX - ошибка управления. В данном электроприводе разрывное управление прикладывается к объекту 3-го порядка.Поэтому функция переключения относительно ошибки управления dn должна включать производные до 2-го порядка. + Cjdm-tCjdri. Выражение (2) при К, О, VM,.. ,Tл , ---)-, ; K 2 отключится от указанного выражения для функции переключения только на величину (...М, т.е. при кусочно-постоянных сигналах Dj, m на постоянную величину. Для компенсации возникающей в связи с этим постоянной установившейся ошибки управления в выражение для .функции переключения, используемой IB рассматриваемом электроприводе, вводится дополнительный интегральный 11 (sлdt При этом элекчлен 1 тропривод обладает астатизмом как по задающему сигналу n;j , так и по возмущающему т| {интегральный член функции переключения формируется интегратором 9). При отсутствии задающего сигнала (nj 0) релейный регулятор 6 пер еключается из одного положения в другое с высокой Частотой за счет обратной связи по сигналу переключения, т.е. работает в СР, поддерживая значение S О на выходе формирователя 8 сигнала переключения. При появлении задающего сигнала (пз 0) сигнал переключения S в соответствии с (2) принимает положительное или отрицательное значение, что приводит к установке регулятора 6 в соответствующее устойчивое состояние, т.е. на его выходе устанавливается постоянный сигнал. Этот сигнал через интегратор-ограничитель 7 управляет напряжением преобразователя 3,обеспечивая разгон электродвигателя 1. При этом его скорость приближается к заданному значению в режиме предельного быстродействия. Одновременно сигнал переключения S возвращается к нулевому значению. В момент времени, когда этот сигнал становится равным нулю (), регулятор 6 опять переводится в скользящий режим, т.е. переключается с высокой
частотой, обеспечивая поддержание . При этом в соответствии с (2) движение описывается дифференциальным уравнением
+
ДГЧI
где Лп Hj- п - ошибка управления
Коэффициенты К,
К2/ К выбираются так, чтобы в. скользящем режиме обеспечивался желательный характер приближения ошибки к нулю. Аналогич но устройство работает и при приложении к электродвигателю 1 нагрузки Как только возникает момент нагрузки (П1ц, 0) (Сигнал переключения в соответствии с (2) принимает полО жительное или отрицательное значение. На выходе регулятора 6 устанавливается постоянный сигнал, который через интегратор-ограничитель 7 управляет напряжением преобразователя 3, обес печивая возрастание тока якоря элек тродвигателя 1, компенсирующего момент нагрузки. При этом ток якоря
растет в режиме предельного быстродействия. Одновременно сигнал переключения S возвращается к нулевому значению и в момент времени, когда он вновь становится равным нулю, регулятор 6 начинает работать в СР, а движение описывается уравнением (2а), т.е. носит желательный характер.
Интегратор-ограничитель 7 ограничивает скорость изменения управляющего сигнала на входе преобразователя 3. до уровня, определяемого допустимым значением динамического уравнительного тока.
В СР релейный регулятор 6 эквивалентен усилителю с бесконечнЕлм коэффициентом усиления, в результате чего система эквивалентна астатической как по заданному, так и по возмущающему воздействию.
Таким образом, введение интегратора-ограничителд и формирователя сигнала переключения позволило избежать дифференцирования сигналов скорости и тока электродвигателя, что повышает точность и энергетические показатели электропривода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока | 1984 |
|
SU1226600A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод постоянного тока | 1987 |
|
SU1429268A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Система позиционного управления электроприводом | 1985 |
|
SU1312521A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА, содержащий электродвигатель с датчиком скорости, подключенный к преобразователю, сумматор, первый вход которого соединен с источником задающего сигнала, второй - с выходом датчика скорости, а выход через релейный регулятор скорости связан с входом преобразователя, отличающийся тем, что, с целью повышения точности и улучшения энергетических показателей привода, в него введены интегратор-ограничитель включенный между выходом релейного регулятора скорости и входом преобразователя, а также формирователь сигнала переключения, состоящий из интегратора и масштабного усилителя с тремя входами, причем выход сумматора соединен с входом интегратора и первым входом масштабного усилис теля, второй вход которого соединен € с выходом интегратора, третий - с (Л выходом интегратора-о1 раничителя, а выход масштабного усилителя соединен с входом релейного регулятора скорое ти. со ;о со 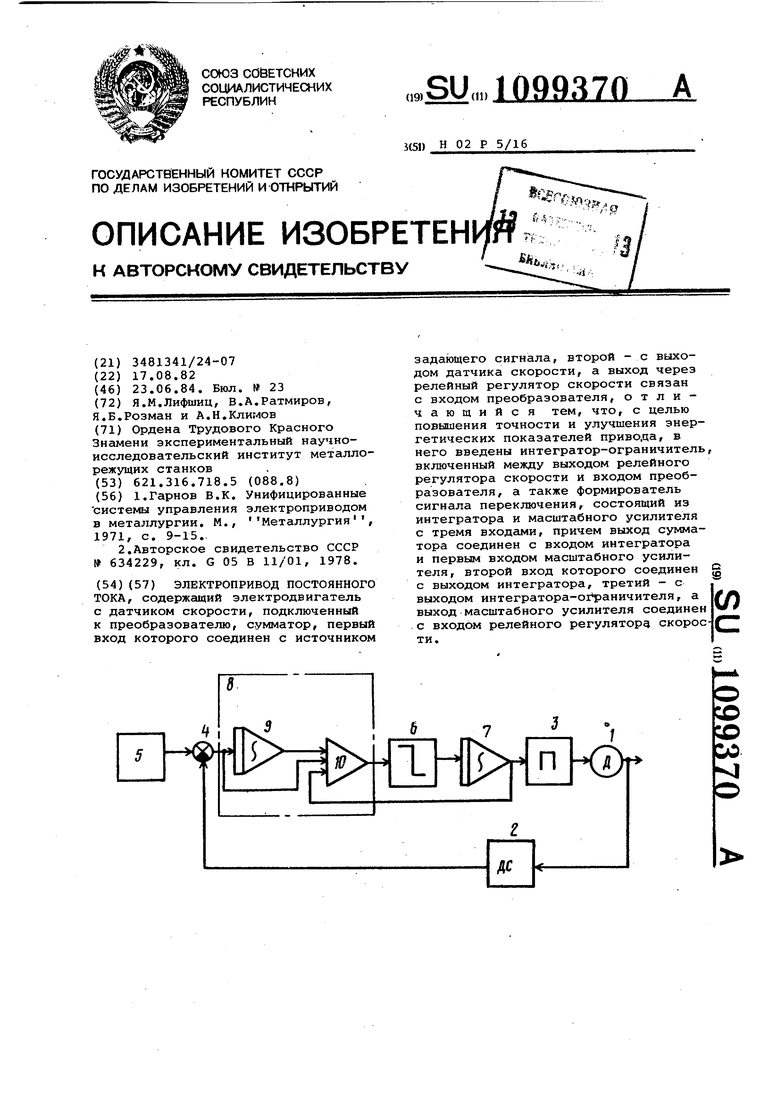
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Унифицированные системы управления электроприводом в металлургии | |||
| М., Металлургия, 1971, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
