1
Изобретение относится к центробежным регуляторам скорости и может быть использовано для автоматического регулирования скорости ведущего звена машин и приборов.5
Известны центробежные регуляторы, которые состоят из тормозного элемента, двух инерционных масс, упругих элементов и вала вращения 1.
Недостатками таких устройств явля- 10 ится невозможность дистанционного установления точного значения и малая точность.
Наиболее близким по технической сущности к данному изобретению явля- 15 ется центробежный регулятор скорости, содержащий закрепленную на вращающемся валу платформу с двумя взаимно перпендикулярными направляющими, S которых установлены инерционные 20 массы, выполненные из магнитомягкого материала и кинематически связанные между собой 2 J .
Недостатками этого центробежного регулятора являются малая эффектив- 25 ность стабилизирования движения ведущих звеньев машин и приборов, а также невозможность дистанционного установления точно заданного параметра стабилизации.30
Цель изобретения - повышение точности регулятора.
Поставленная цель достигается тем, что в регуляторе одна из инерционных масс выполнена в виде электромагнита.
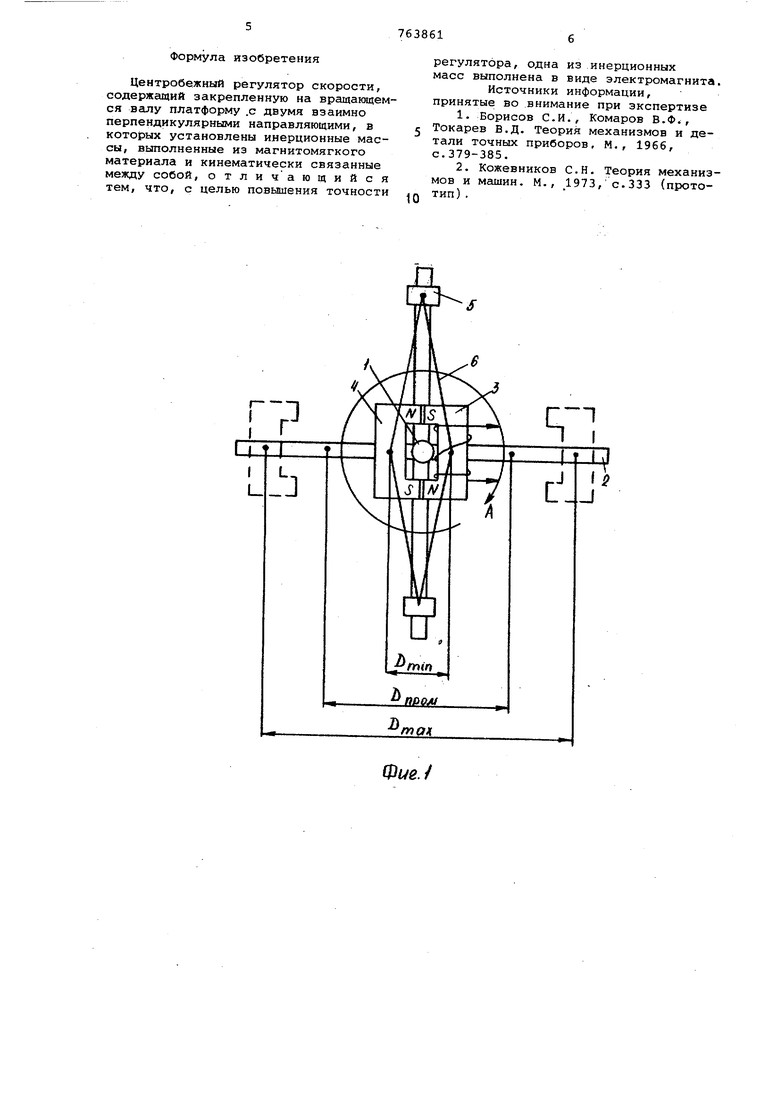
На фиг. 1 схематически изображен центробежный регулятор скорости (обозначения: D, - минимальная орбита, DnpoM промежуточная орбита, Dinax максимальная орбита) ; на
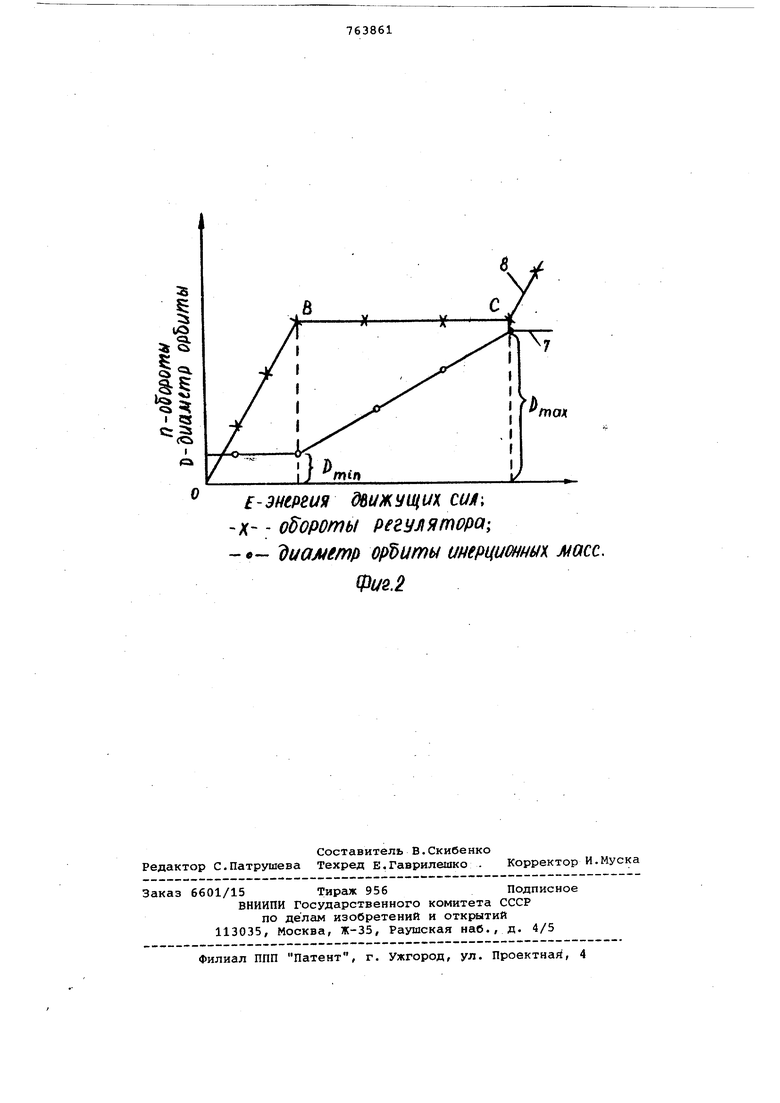
фиг. 2 - кривые зависимости оборотов и диаметр орбит инерционных масс от энергии движущих сил.
Центробежный регулятор скорости содержит вал 1 вращения, платформу с двумя взаимно перпендикулярными направляющими 2, инерционные массы 3 и 4, два сателлита 5 и четыре тяги б.
Инерционные массы 3 и 4 могут перемещаться по направляющим 2 параллельно относительно друг друга или, что то же самое, перпендикулярно относительно сателлитов 5, а совместно с тягами 6, образуют параллелограммный механизм, обеспечивающий совмещение центра системы инерционных масс с осью вала 1 вращения, т.е. если раздвигать инерционные массы 3 и 4, то сателлиты 5 сходятся и наоборот При подаче электрического тока на электромагнит инерционной массы последняя примагнитится с инерционной массой 4. Центробежньй регулятор скорости работает следующим образом. Раскручивая регулятор по стрелке А (фиг. 1) с возрастающей скоростью инерционные массы 3 и 4 под действи ем центробежных сил расходятся и за мут промежуточную орбиту - . Эт орбита соответствует заданному числу угловой скоростиы (заданный пар метр стабилизации). После достижения заданной величины 0-.„ энергию ,I J-wM на раскручивание регулятора отключают. На данной орбите инерционные массы 3 и 4 удерживаются кулоновской силой магнитного притяжения, ра ной f (1) Г -..-|.У| , , ,V J-/ i -i где F, - кулоновская сила; т. инерционные магнитные массы 3 и 4; D - расстояние между инерционными магнитными массами (диаметр орбиты ) . Стабилизация скорости заключает в следугацем. Если заданная угловая скорость cj отклонится в сторону уменьшения до скорости cog / Io центр бежная сила уменьшится, а кулоновская сила начнет сводить инерционные массы 3 и 4, что приводит к уменьше нию момента инерции. Так как произв дение tu) в формуле закона сохранени количества движения h - i(jj const, (2) где h - момент количества движения; i - момент инерции; W - угловая скорость должно остаться неизменным, то угло вая скорость вращения возрастет до (, т.е. до заданной скорости. По аналогии, если заданная угловая ско рость cOj отклонится в сторону увели чения, то происходит тот же процесс только в обратном порядке. Диаметры орбит, занимаемые инерционными массами 3 и 4, определяют потенциальную энергию от действия кулоновских магнитных сил F U P.D.. D D где и - потенциальная энерги m-mg-m. - инерционные магнитны массы 3 и 4; О - дис1метр орбиты (расс яние между инерционны ми магнитными массам 3 и 4) . Стабилизация заданного параметра центробежного регулятора скорости описывается уравнением -dU dE,«. (4) Кинетическая энергия центробежного регулятора скорости Е т-и2.,.,2„о2 (5) у И , со - угловаяскорость ; .- инерционные магнитные массы 3 и 4; R - радиус орбиты. Уравнение (4) говорит о том, что потенциальн ая энергия центробежного регулятора переходит в кинетическую по мере того, как последняя тратится на вращение центробежного регулятора скорости, который в свою очередь жестко связан с первичным узлом механизма или прибора, и, наоборот, при подключении к центробежному регулятору движущих сил их кинетическая энергия переходит в потенциальную в виде увеличения орбиты, занимаемой инерционными магнитными массами 3 и 4, Однако при этом обороты центробежного регулятора скорости остаются постоянными, т.е. ЕКИН + IJ const, (6) где Е,ц - кинетическая энергия центробежного регулятора скорости ; и - потенциальная энергия центробежного регулятора скорости. На фиг. 2 кривая 7 изображает зависимость диаметра орбиты, занимаемой инерционными массами 3 и 4 от подводимой энергии движущих сил, кривая 8 - зависимость числа оборотов центробежного регулятора скорости от энергии движущих сил. Участок В-С на кривой 8 отображает диапазон стабилизации центробежного регулятора скорости в интервале орбит от 0, ДО . Регулирование параметра стабилизации угловой скорости производится следующим способом. Увеличивая или уменьшая напряженность магнитного поля, создаваемого магнитной инерционной массой 3, увеличивают или уменьшают кулоновскую силу. Увеличиваясь кулоновская сила стягивает инерционные массы 3 и 4, что приводит к уменьшению момента инерции,а это в свою очередь влечет за собой увеличение угловой скорости. При уменьшении кулоновской силы, параметр стабилизации соответственно сдвигается в область малых угловых скоростей. Использование в качестве одной из инерционных масс электромагнита позволяет повысить точность регулятора.
Формула изобретения
Центробежный регулятор скорости, содержащий закрепленную на вращающемся валу платформу .с двумя взаимно перпендикулярными направляющими, в кото1зых установлены инерционные массы, выполненные из магнитомягкого материала и кинематически связанные между собой, отличающийся тем, что, с целью повышения точности
регулятора, одна из инерционных
масс выполнена в виде электромагнита.
Источники информации, принятые во внимание при экспертизе
1.Борисов С.И., Комаров В.Ф., Токарев В.Д. Теория механизмов и детали точных приборов, М., 1966,
с.379-385,
2.Кожевников С.Н, Теория механизмов и машин. М., 1973,с.333 (прототип) ,
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Центробежный регулятор скорости | 1979 |
|
SU842734A1 |
| Центробежный регулятор скорости | 1979 |
|
SU962878A1 |
| Центробежный регулятор скорости | 1982 |
|
SU1016775A1 |
| Центробежный регулятор скорости вала | 1984 |
|
SU1170436A1 |
| Центробежный регулятор скорости | 1983 |
|
SU1095145A1 |
| Центробежный регулятор скорости вращения | 1985 |
|
SU1273890A1 |
| Учебное пособие по механике | 1982 |
|
SU1067524A1 |
| Учебный прибор по физике | 1981 |
|
SU1001155A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| Способ очистки орбит от объектов космического мусора | 2018 |
|
RU2676368C1 |