Изобретение относится к автоматике и может быть использовано при проектировании АСУ ГП и систем с числовым программным управлением, в частности систем управления плазменной наплавкой инструментов.
Цель изобретения - повышение точности обработки изделий за счет компенсации теплового расширения заготовок.
Сущность изобретения состоит в расширении области применения устройства путем введения технических средств для осуществления компенсации теплового расширения заготовок в процессе обработки и повышении на этой осноее точности их обработки. Компенсация заключается в соответствующем изменении перемещения
заготовок относительно обрабатывающего узла в процессе обработки. Абсолютная величина А1теплового расширения заготовки определяется температурным датчиком, установленным на задней бабке координатного стола обрабатывающего центра и учитывается при перемещении заготовки относительно обрабатывающего узла в процессе ее обработки, чем и обеспечивается компенсация теплового расширения заготовки, а следовательно, повышается точность обработки заготовок и расширяется область применения обрабатывающего узла.
На фиг. 1 приведена функциональная схема устройства для программного управления; на фиг. 2 - схема взаимного располоо
(А О
С
жения обргбатыаающек. па и заготовки в гроцессе ее обэаботкл; на фиг 3 - обрабатываемая за-оювха; на хриг. 4 - графики теплового расширения заштовки в процессе обработки; на фиг. 5 - функциональная схема блока коррекции вибрации; на фиг. 6 - функциональная схема блока коррекции накопления; на фиг. 7 м 8 - функциональные схемы первого и второго Г/нокоа мнгштаби- рования соответственно; на Фиг. 9 функци- схема блока коррекции положения исполнительного механизма; на фиг. 10 и 11 - функциональные схемы пзо- вого и второго блоков сопряжения; на фиг, 12-17 -- временные диаграммы работы бло- ков.
Устройстве, для программное vnpai e- ния (фиг. 1) содержит температурный датчик I теплового расширения- :-Э От„вк д блок 2 выделения импульсов, счешик 3, блок 4 ин- дикации, блок 5 задз тя программ, блок б коррекции вибрации, блок 7 коррекции накопления, исполнительный механизм 8, дат- чик 9 положения исполнительного механизма, первый 10 и второй 11 б/оки масштабирования, первый блок 1 сопряжения, блок 13 коррекции положения исполнительного механизма ercpoi блек 4 сопряжения, генератор 1ci ими/льсов, эле мент ИЛИ 16, выхо,с 17 конца сгерац л, тактовые выходы 18 и S9 (и f л -f Сигналов включения 20 и мачала рзоогь 21 первый зыход 22 кода делени1 в иэо пы- ход 23 кода деления, вход Ј4 ivcxa в.ход 25 блока 12 сопряжения, ыход 2f; 6, Вй(ход27счстчика3 выход 2Ь бло Кг) /-, вуии 23 элгнен а ИЛУ 16, еыхс 30 блока 13
Исполч лт пьвы/ меда изм fc(wr Осо- держмт шнин е;ь 31, блои 32 о т-)( K,, заготовку 33, блок 34 rer-intpa T/pnr f о удлинения заготовки i о Ьлгри вод 36 по оси Z.
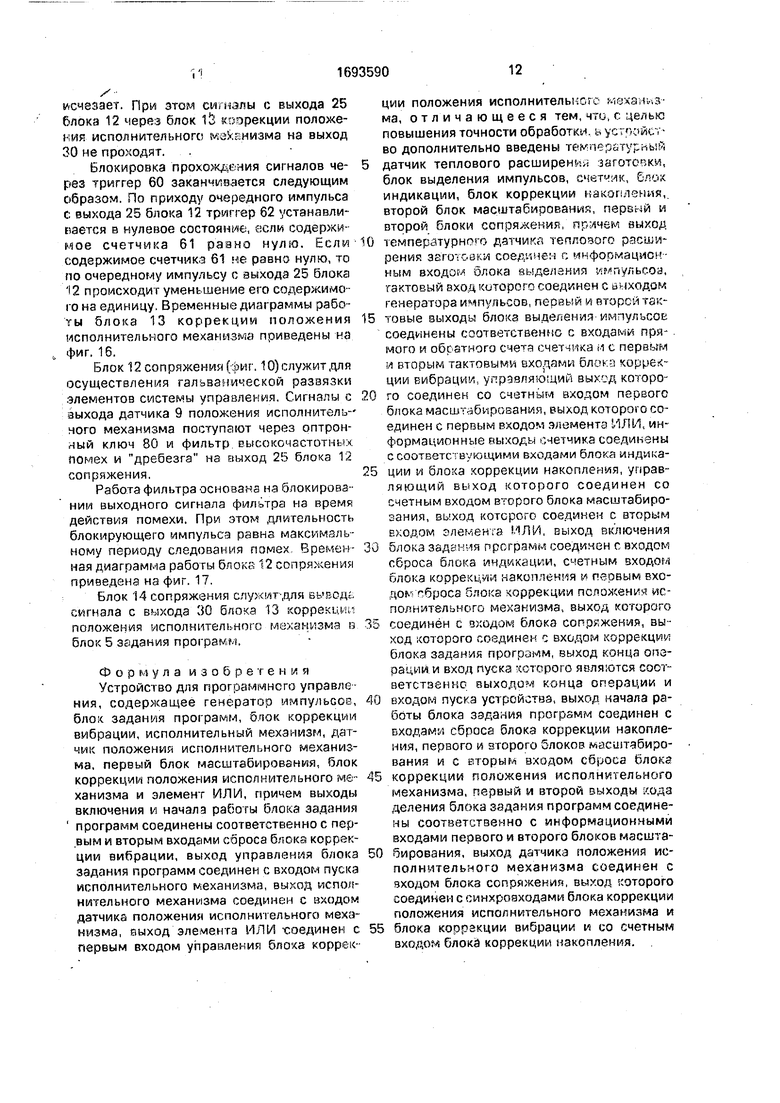
Ьлок 6 коррекции в Ирации (фиг. В) содержит реаерч «БНЫЙ считчик 37, т ри, гер 38 блокировки, первый 3S и второй 4t. ijt/Г еры синхронизации, одновибрагск) 4i i иизации, одновибратор 42, эм.ьн i/i 43, первый 44 и второй 4С 1/ЗЛИ. i элемент ИЛИ-НЕ 46
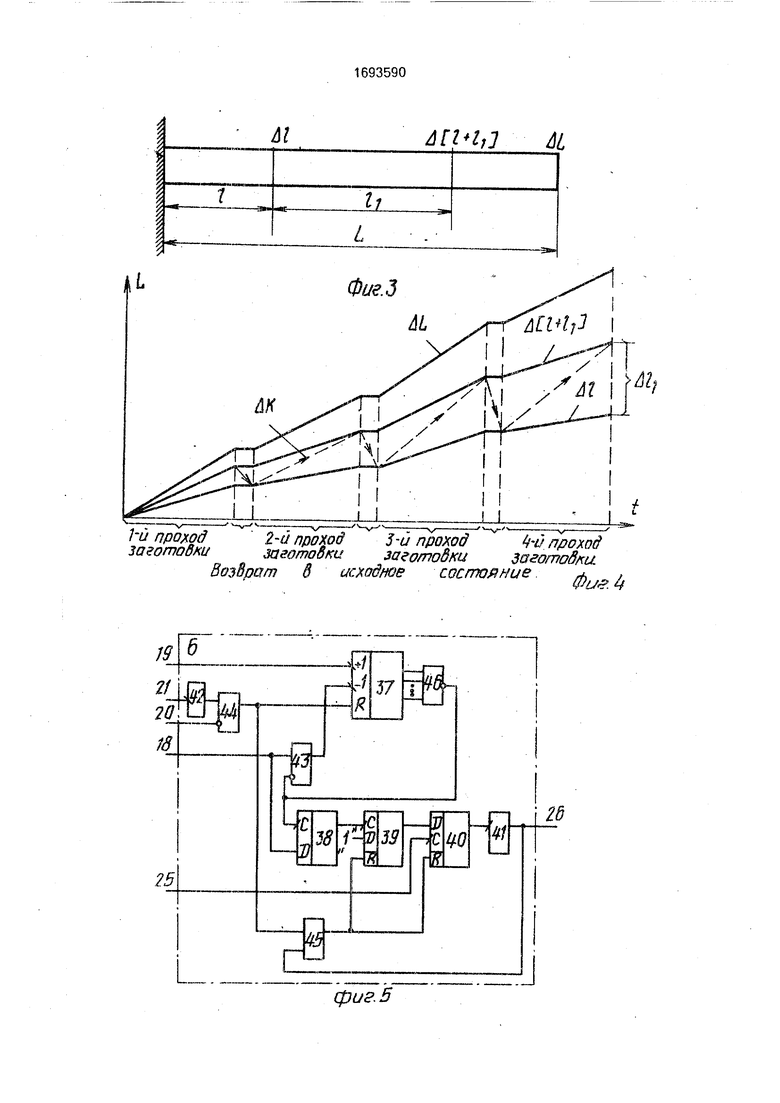
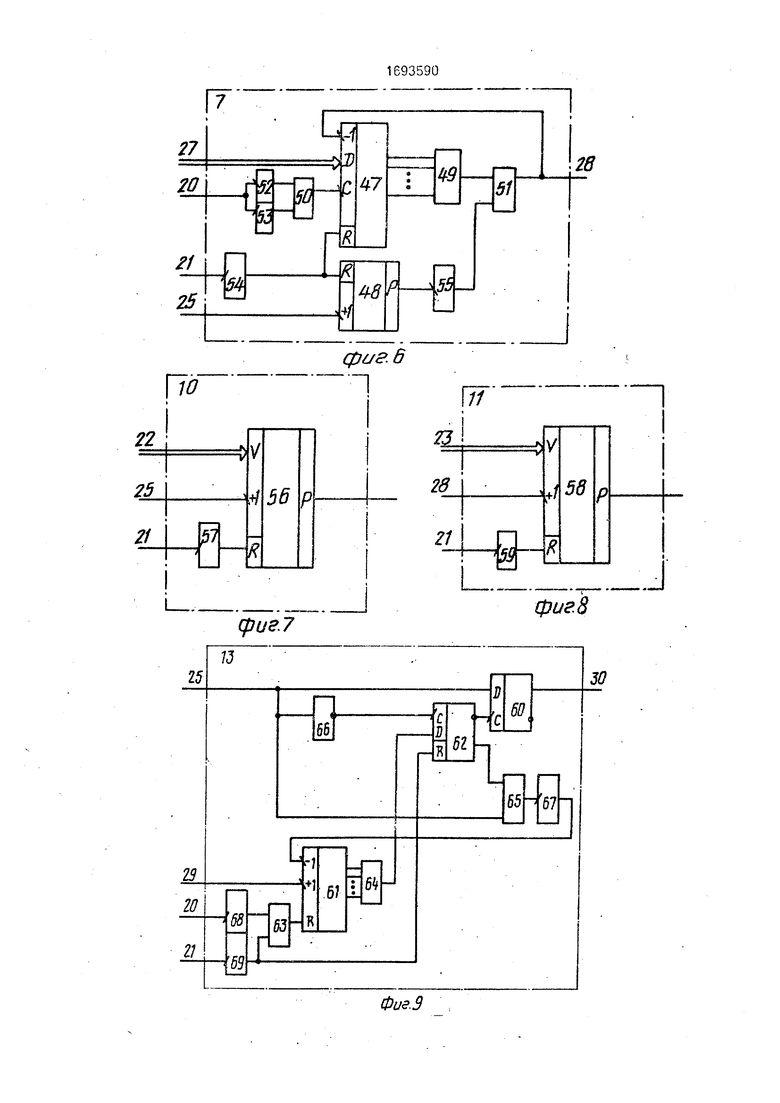
Ьлок 7 коррекции накопгенин (ф,,г. 6) содержит счетчик 47, дел и re n ь 48 частоты на счетчике, первый 49 и второй 50 ИЛИ, элемент И 51, первый 52 - четверилй Ь5 одновибрагоры.
Первый блок 10 масштабирования фиг 7) содержи счетчик 56 и одновиЬраюр 57 Второй блок 11 масштаи чройания (биг. & содержит счетчик 58 и одновибрагор 53,
13 коррекции поисжениь тельного механизма ( Ф ;оч5ржиг триггер 60 блокировки, счетчик 61 первый элемент ИЛИ 64, триггер 62 упраолеит, второй элемент ИЛИ 63, элемент И 65, элемент f4E 66, первый 67 -третий 69 одисви/ Срг.тагкл
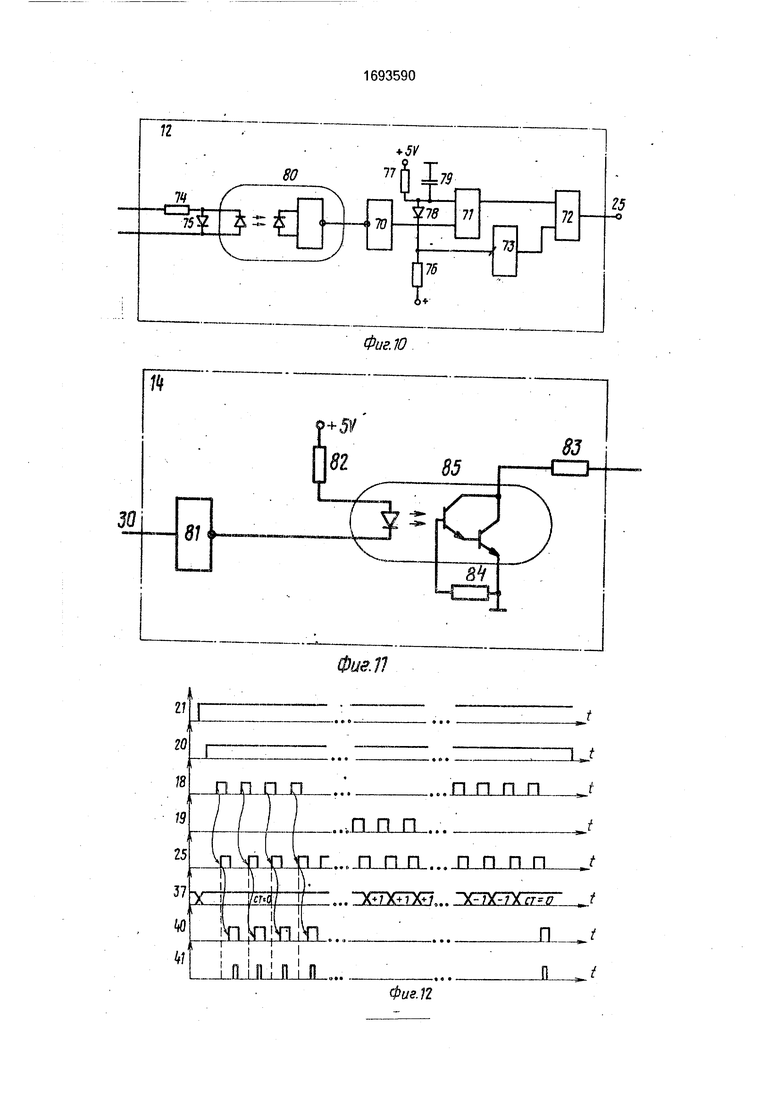
Первый блок 12 сопряжении (фиг. 10} содержит элемент НЕ 70, и 71 и второй 72 элементы И, одновибратор 3, г.ьр- вый резистор 74, первый диод 75 второй 76 и третий 77 резисторы, второй диод 78 конденсатор 79 и оптронный ключ 30. второй G/IOK 14 сопряжения (фиг 11) содержит элс- мент -iFoi - рвый 6У - г4 резисторы И ОПГрОЬ 36.
Назначение блоков системы.
Температурный датчик 1 теплового расширения зэгоювки предназначен для фор жирования CHI налов абсглютчо величины эплового расгоиреняя A L оя. отепли
Блок 2 вилегюн1 импул лоъ формирует на своих выходах 10 и 19 серии имгульсов f, -f, соответствующие удлинению или укорочению заготовки. ( обеспе1ения высокой точности обработки заготовки частота следования и.ипульх) , - должна быть существенно больше частоты следования импульсов с температурного датчика 1
Счетчик 3 предназначен для формирования двоичч -десятичного кода абсолют- (0й велич1и и & L гепювого расширителя
SesiOTOBKH, MCr:0-1l.iyCiv:orO ДНЯ ЛНДИКЭц И 3
Окне 4 икгиоци. 1 я в блоке коррекции -.а опления. Елок 4 «ндикаиии сгухит дик линейною aaroiOR И
EIQK 5 эадсни программ предназначеч для -/правлении фучкципнкрован1 ем усг- ройсгзй. По гспу операции, поступающему «а вход 2 а блок 6 зад ия nporp VIM формируются и выд&.стся с/ вА /ющие сигналы; си-кал начала работу (выход 21), сиг :ал в пгочения обрабатывающего узла (выход 20); первый код деления (выход 22); второй код деления (выход 23), управляющий выход; выход конца операции.
Блок 6 короекцш виорации предназначен для учета незначительных колебаний температуры относительно исходного со- стояния в процессе ра5р°его ходя заготовки и выдачи корректирующих смгнсшоз.
7 коррекции накопления служит для компенсации aKonnennqro до начала очередное прохода ЗЭГОГОВКЕЛ расширения AiL, либо в процессе возврата заготовки.
Исполнительный механизм 8 предказ- для перемещения заголовки относительно обрабатывающего узла. После чглючения для программного уп- ряцлокия see /. рааляемыс механизмы уста навлкваются в исходное положение
Автоматический цикл начинается с установки всех механизмов в рабочее положение (заготовка предварительно устанавливается в призму станка). По оси Z заготовка выводится в рабочее положение, заданное по программе. Затем включается блок 32 обработки и по достижении рабочего режима начинается вращение заготовки с ее подачей по оси 2. Далее идет процесс обработки заготовки. При нагреве заготовки в процессе обработки происходит ее удлинение, что фиксируется температурным датчиком 1 в блоке 34 измерения и корректируется путем изменения перемещения заготовки по координате Z. По окончании обработки заданного перемещения происходит останов движения заготовки по координате Z, блок 32 обработки отключается и переходит в исходное состояние. Механизм стола 35 возвращается в первоначальное рабочее положение. Шпиндель 31 устанавливается в положение второго прохода обработки заготовки. Далее исполнительный механизм 8 функционирует аналогично.
Датчик 9 положения исполнительного механизма формирует импульсные сигналы в процессе перемещения заготовки относительно обрабатывающего узла. Число формируемых сигналов пропорционально длине обработанного участка заготовки.
Блоки 10 и 11 масштабирования служат для уменьшения частоты следования корректирующих сигналов с блоков 6 и 7, что позволяет учитывать длину рабочей части заготовки, схемные особенности блога 2, неточности, вызванные наложенными ь процессе разработки алгоритма компенсации ограничениями, а также обеспечить оптимальное распределение погрешности по длине заготовки.
Блок 13 коррекции положения исполнительного механизма предназначен для блокировки прохождения импульсов с выхода датчика 9 положения на блок 5 задания программ. Одному импульсу коррекции, поступающему в блок 13 с выхода элемента ИЛИ 16, соответствует блокировка сигналов от датчика 9 положения исполнительного механизма на один такт. Блоки 12 и 14 сопряжения предназначены для осуществления гальванической развязки элементов и исполнительных элементов.
Для обеспечения высокой скорости и точности обработки необходимо осуществление компенсации теплового расширения заготовки путем изменения взаимного расположения заготовки и обрабатывающего узла. Это может быть выполнено путем соответствующего изменения перемещения
заготовки по оси Z относительно обрабатывающего узла (фиг. 2).
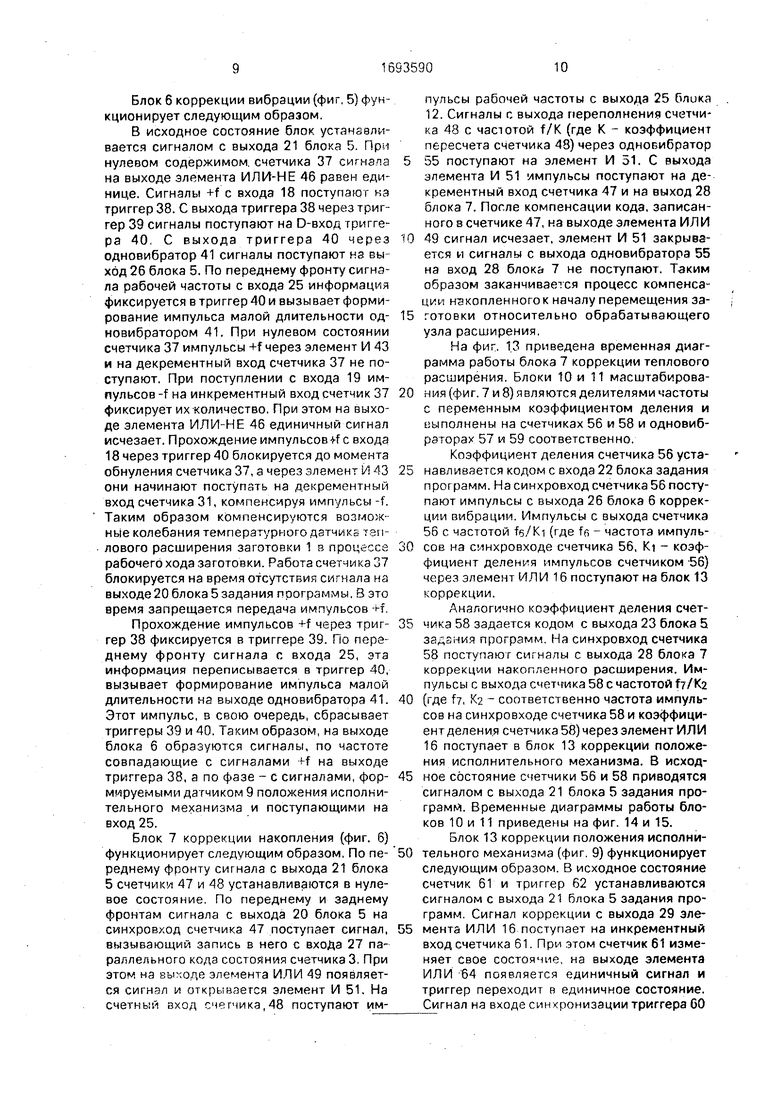
Примем следующие ограничения (фиг. 3). Длина хвостовиков заготовок равна I и об51
рабатываемая часть равна h(i I - LJ/leвый торец заготовки в процессе обработки не изменяет своего положения относительно передней бабки (шпинделя 31) коорди0 натного стола 35. Процесс обработки состоит из нескольких идентичных проходов, во время каждого из которых происходит обработка рабочей поверхности заготовок, возврат в начальную точку, изме5 нение взаимного положения заготовки и об- рабатывающего узла для очередного прохода.
График предполагаемого теплового расширения заготовки в процессе ее обра0 ботки показан на фиг. 4, где использованы следующие обозначения:
A L - суммарное тепловое расширение заготовки;
А - тепловое расширение левого хво5 стовика,
Ah - тепловое расширение рабочей части;
А (I + И)-тепловое расширение заготовки на участках I и Н;
0А К - компенсация теплового расширения в процессе обработки заготовки.
Для обеспечения высокой точности обработки при первом проходе заготовки (фиг. 4) должна произойти компенсация теплово5 го расширения на величину A i(l + И). Рабочий ход заготовки при этом равен
IP, li +Ai (I +li) h + f AiL li+ApiK,
О
где Ail -суммарное тепловое расширение
0 заготовки за один проход;
A piK - компенсация расширения заготовки за один проход.
Во время возврата заготовки в начальную точку должно быть учтено изменение
5 координат начала рабочей части заготовки за счет расширения левого хвостовика Ail. Следовательно, величина обратного хода возврата равна
0 I bi h +Ali H +|-AiL li AbiK,
где AbiK - компенсация теплового расширения во время возврата заготовки.
Так как время возврата заготовки не5
значительно по сравнению с длительностью рабочего хода, то пренебрегаем остыванием заготовки во время возврата.
При втором проходе величина необходимой компенсации составит
ApzK- Az(l + li}- Да.
u
В процессе второго возврата заготовки необходимо скомпенсировать величину
ДЬ2К
ДЬ К AzM -A2L.
О
Аналогично определяются величины
компенсации для остальных проходов. Кривая предполагаемого изменения компенсации Д К в процессе обработки заготовки приведена на фиг 4.
Устройство работает следующий образом.
По «оду операции с входа 2ч блок 5 задания программ выдает управляющие сигналы на выходи 20 и 1 и vnpasuiHiouiHft выход При этом привод ion в исходное со стояние блок 6 коррекции вибрации и блок 1 коррекции накопления, происходи настройка бликов 10 и 1 масшгабированич на заданный коэффициент пересчета и включается исполнительный механизм 8. При этом датчик 9 положения исполнительною механизма формирует импульсные сигналы, соответствующие перемещению 1н оковки по оси Z. Эти сигналь проходят чэре $ блок 12 сопряжения, блок 13 юррскци i понижения исполни ельного мехгьизмс блок И сопряжения и поступают в блек 5 задания программ, В блоке 5 задание пи ) осуществляется подсчет зп/х гмиульсов j выработка соответствующего гю- фляюща- го воздействия Hd исполнитель ый лемент 8, что приводит к соответст УОЩСРУ перемещению заготовки относи ельнс обрзба тывающего узла по оси I К ориентация тепловою расширений загопэьки по оси Z пооисходит за счет блокирования масти импульсных сигналов от датчика 9 в Ьлоке 13 коррекции положения исполнительного механизма, что приводит к соогветсшующзглу увеличению перемещения заготовки по ко оодинате Z,
При наличии сигнала на зыходе элемента ИЛИ блок 13 коррекции положения ис- чолнительного меочиз а блокирует трохождение одного иглпупьсчого си-нелз с выхода датчика 9 положения мспо.шигело- иого механизма н один период (. 16)
Управляющие сигналы на элемент 15 поступают по двум Н.СЗЕВИСИ ЫЙ зетьям коррекции. Одна из них компенсирует геп повое расширение в процессе рабочего хода заготовки и состоит из блоков 6 I 10, Таким образом, во время рабочего хода заготовки импульсы датчика (еплового расширения заготовки 1, проходя через блоку 2, 6 м 10 и элемент ИЛИ 16, поступают Б блок 13 коррекции положение ис юлнителаного механизма, вызывая соответствующую блокировку прохождения импульсных сиггалоч с датчика 9 положения исполнительного механизма на блок 5 задания программ, Другая ветвь компенсации включает блоки и 11, что позволяет скомпенсировать расширение, накопленное до начала обрабо ки заготовки либо при ее возврате после каждого прохода. Управляющие сигналы обеих ветвей коорекцукл синхронизируются соответственно в Гноках 6 и 7 сигналами с выхода датчика 9 положения исполнительного механизма R исходное состояние все блоки устанавливаются сигналами с выходов 20 и
1 блока 5 задания программ. При этом счетчики олоков 6, 7 10, 11 и П сбрасываются. По переднему фронту сигнала но выходе 20 блока 5 задания программ начинается рабочий ход заготовки и в счетчик блока 7
записывается сформированный е счетчике 3
код накопленного расширения заготовки.
По сигналу на выходе 21 блока 5 задания
программ разрешается работе блока 6 и 7,
Компенсация накопленного расширения происходит до момента обнупения счет- чикэ 47 блока 7 импульсами с частотой в К раз (К 2, 4, 8, 16 } меньшей частоты им- Г|/пьснэ1х сиги злое с выхода датчика 9 положения, что нео охэдлмо для равномерного
распределения процесса компенсации по /т.ине ррбичего перемещения заготовки. Го гокущею расширения проис- ход/i сигналом с частотой +т ( 18 (Зпэка 2) м о возможной вибрации
лаютовки
Го о он чании очередного прохода по задиэку (y сигналя с выхода 20 блока г гадания про.ралм c - iMHk 37 блока 6 бл кир /erci, а в счетчик &7 7 вновь
записнв ютсй данные с выхода 27 счетчика 3, которые и компенсируются в нем в процессе возврата заготовки.
В дальнейшем описанной цикл повторяется при очередных проходах заготовки
рабатывающим /злом. При окончании обработки заготовки блок 5 профамм с. ни выходах 20 и 21, устанавливав в исходное состояние блоки 10 и 11 и ьыдает на выход 17 си нал окончания
О операции.
Блок б коррекции вибрации предназначен для учета незгачительяых колебаний датчика 1 температурного расширения заго- 5 товк:и относительно исходного состояния в процессе обработки заголовки и выдачи со- огретствующих управляющих воздействий iepea блок 10 масштабирования и элемент ИЛИ 16 на блок 13 коррекции положения исполнительного механизма
Блок 6 коррекции вибрации (фиг, 5) функционирует следующим образом.
В исходное состояние блок устанавливается сигналом с выхода 21 блока 5. При нулевом содержимом счетчика 37 сигнала на выходе элемента ИЛИ-НЕ 46 равен единице. Сигналы +f с входа 18 поступают на триггер 38. С выхода триггера 38 через триггер 39 сигналы поступают на D-вход триггера 40, С выхода триггера 40 через одновибратор 41 сигналы поступают на выход 26 блока 5. По переднему фронту сигнала рабочей частоты с входа 25 информация фиксируется в триггер 40 и вызывает формирование импульса малой длительности од- новибратором 41. При нулевом состоянии счетчика 37 импульсы +f через элемент И 43 и на декрементный вход счетчика 37 не поступают. При поступлении с входа 19 импульсов -f на инкрементный вход счетчик 37 фиксирует их количество. При этом на выходе элемента ИЛИ-НЕ 46 единичный сигнал исчезает. Прохождение импульсов-rf с входа 18 через триггер 40 блокируется до момента обнуления счетчика 37, а через элемент И 43 они начинают поступать на декрементный вход счетчика 31, компенсируя импульсы -f. Таким образом компенсируются возможные колебания температурного дзтчикь теплового расширения заготовки 1 в процессе рабочего хода заготовки. Работа счетчика 37 блокируется на время отсутствия сигнала на выходе 20 блока 5 задания поограммы, В это время запрещается передача импульсов +f.
Прохождение импульсов +f через триггер 38 фиксируется в триггере 39. По переднему фронту сигнала с входа 25, эта информация переписывается в триггер 40, вызывает формирование импульса малой длительности на выходе одновибратора 41. Этот импульс, в свою очередь, сбрасывает триггеры 39 и 40. Таким образом, на выходе блока 6 образуются сигналы, по частоте совпадающие с сигналами ff на выходе триггера 38, а по фазе - с сигналами, формируемыми дагчиком 9 положения исполнительного механизма и поступающими на вход 25.
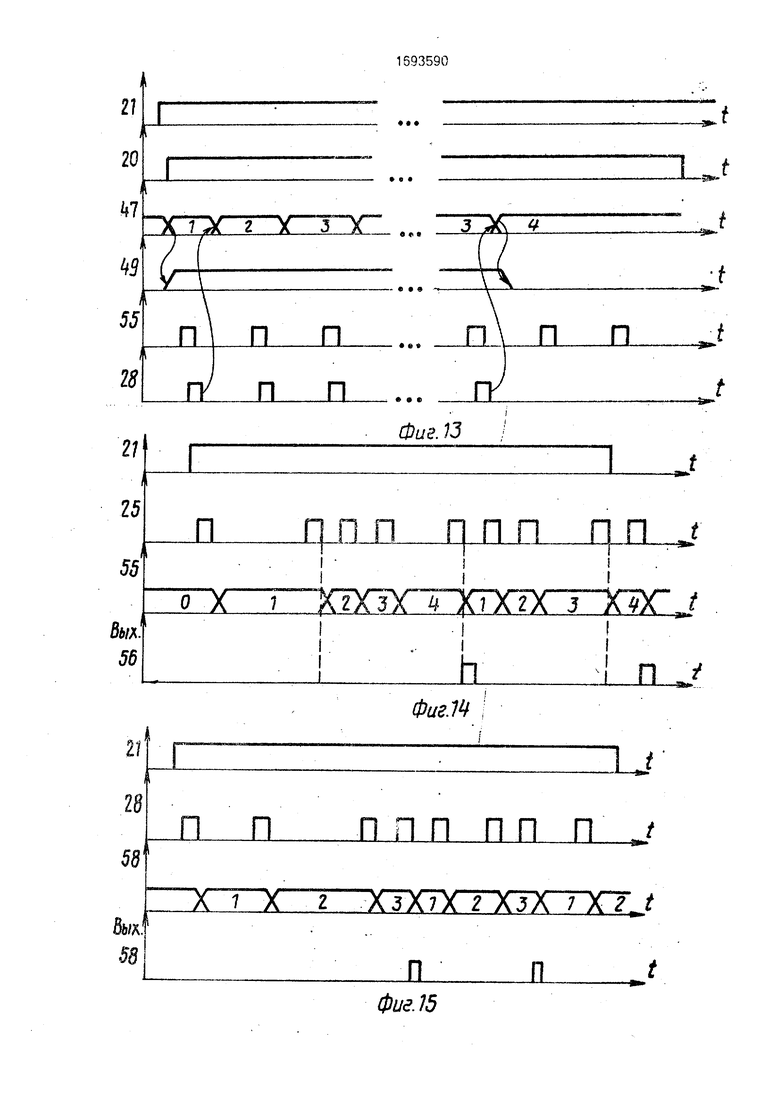
Блок 7 коррекции накопления (фиг. 6) функционирует следующим образом. По переднему фронту сигнала с выхода 21 блока 5 счетчики 47 и 48 устанавливаются в нулевое состояние. По переднему и заднему фронтам сигнала с выхода 20 блока 5 на синхровход счетчика 47 поступает сигнал, вызывающий запись в него с входа 27 параллельного кода состояния счетчика 3, При этом на выходе элемента ИЛИ 49 появляется сигнал и открывается элемент И 51. На счетный вход счетчика,48 поступают импульсы рабочей частоты с выхода 25 блика 12. Сигналы с выхода переполнения счетчика 48 с частотой f/K (где К - коэффициент пересчета счетчика 48) через одновибратор 5 55 поступают на элемент И 51. С выхода элемента И 51 импульсы поступают на декрементный вход счетчика 47 и на выход 28 блока 7. После компенсации кода, записанного в счетчике 47, на выходе элемента ИЛИ
0 49 сигнал исчезает, элемент И 51 закрывается и сигналы с выхода одновибратора 55 на вход 28 блока 7 не поступают. Таким образом заканчивается процесс компенсации накопленного к началу перемещения за5 готовки относительно обрабатывающего узла расширения.
На фиг. 13 приведена временная диаграмма работы блока 7 коррекции теплового расширения. Блоки 10 и 11 масштабирова0 ния(фиг. 7 и 8) являются делителями частоты с переменным коэффициентом деления и выполнены на счетчиках 56 и 58 и одновиб- рэгорах 57 и 59 соответственно.
Коэффициент деления счетчика 56 уста5 навливается кодом с входа 22 блока задания программ. На синхровход счетчика 56 поступают импульсы с выхода 26 блока 6 коррекции вибрации. Импульсы с выхода счетчика 56 с частотой fe/Ki (где fa - частота импуль0 сов на синхровходе счетчика 56, Ki - коэффициент деления импульсов счетчиком -56) через элемент ИЛИ 16 поступают на блок 13 чоррекции.
Аналогично коэффициент деления счет5 «ика 58 задается кодом с выхода 23 блока 5 задания программ. На синхровход счетчика 58 поступают сигналы с выхода 28 блока 7 коррекции накопленного расширения. Импульсы с выхода счетчика 58 с частотой
0 (где fy, K2 - соответственно частота импульсов на смнхровходе счетчика 58 и коэффициент деления счетчика 58) через элемент ИЛИ 16 поступает в блок 13 коррекции положения исполнительного механизма. В исход5 ное состояние счетчики 56 и 58 приводятся сигналом с выхода 21 блока 5 задания программ. Временные диаграммы работы блоков 10 и 11 приведены на фиг. 14 и 15.
Блок 13 коррекции положения исполни0 тельного механизма (фиг. 9) функционирует следующим образом. В исходное состояние счетчик 61 и триггер 62 устанавливаются сигналом с выхода 21 блока 5 задания программ. Сигнал коррекции с выхода 29 эле5 мента ИЛИ 16 поступает на инкрементный вход счетчика 61. При этом счетчик 61 изменяет свое состояние, на выходе элемента ИЛИ 64 появляется единичный сигнал и триггер переходит в единичное состояние. Сигнал на входе син ронизации триггера 60
исчезает. При этом си.нэлы с выхода 25 блока 12 через блок 13 коррекции положения исполнительного .низма на выход 30 не проходят.
Блокировка прохождения сигналов через триггер 60 заканчивается следующим образом. По приходу очередного импульса с выхода 25 блока 12 триггер 62 устанавливается в нулевое состояние, если содержимое счетчика 61 равно нулю. Если содержимое счетчика 61 не равно нулю, то по очередному импульсу с выхода 25 блока происходит уменьшение его содержимого на единицу. Временные диаграммы работы блока 13 коррекции положения исполнительного механизма приведены на фиг. 16.
Блок 12 сопряжения (фиг. 10) служит для осуществления гальванической развязки элементов системы управления. Сигналы с зыхода датчика 9 положения исполнительного механизма поступают через оптрон- ный ключ 80 и фильтр высокочастотных помех и дребезга на выход 25 блока 12 сопряжения,
Работа фильтра основана на блокировании выходного сигнала фильтра на время действия помехи. При этом длительность блокирующего импульса равна максимальному периоду следования помех Времен- ная диаграмма работы блока 12 сопряжения приведена на фиг. 17.
Блок 14 сопряжения слухит-для вь водг. сигнала с выхода 30 блока 13 коррекции положения исполнительного механизма н блок 5 задания программ,
Формула изобретения Устройство для программного управления, содержащее генератор импульсов, блох задания программ, блок коррекции вибрации, исполнительный механизм, датчик положения исполнительного механизма, первый блок масштабирования, блок коррекции положения исполнительного механизма и элемент ИЛИ, причем выходы включения и начала работы блока задания программ соединены соответственно с первым и вторым входами сброса блока коррекции вибрации, выход управления блока задания программ соединен с входом пуска исполнительного механизма, выход исполнительного механизма соединен с входом датчика положения исполнительного механизма, выход элемента ИЛИ соединен с
15 товые выходы блока выделения импул соединены соответственно с входами мого и обратного счета счетчика м с пе и вторым тактовыми входами блокп ко ции вибрации, управляющий выход ко го соединен со счетным входом пер блока масштабирования, выход которо единен с первым входом элемента ИЛИ формационные выходы счетчика соеди с соответствующими входами блока ин ции и блоха коррекции накопления, у ляющий выход которого соедине счетным входом второго блока масштаб вания, выход которого соединен с вт входом элемента ИЛИ, выход включ блока задания программ соединен с вх сброса блока индикации, счетным вх блока коррекции накопления и первым дов гброса блока коррекции положени полнительного механизма, выход кото соединён с входом блока сопряжения ход которого соединен с входом корре блока задания программ, выход конца рации и вход пуска хоторого являются ветственно выходом конца операц входом пуска устройства, выход начал боты блока задания программ соедин входами сброса блока коррекции нак ния, первого и второго блоков масштаб вания и с вторым входом сброса б коррекции положения исполнитель механизма, первый и второй выходы деления блока задания программ соед ны соответственно с информационн входами первого и второго блоков мас бирования, выход датчика положени полнительного механизма соедин входом блока сопряжения, выход кото соединен с синхроаходами блока корре положения исполнительного механиз
55 блока коррекции вибрации и со сче
40
45
50
первым входом управления блоха коррек- входом блоки коррекции накопления.
0
0
5
0
5
ции положения исполнительного- механизма, отличающееся тем, чти, с целью повышения точности обработки, ь усгоойет- во дополнительно введены температурный датчик теплового расширений заготовки, блок выделения импульсов, счетчик, блок индикации, блок коррекции накопления,, второй блок масштабирования, первый и второй блоки сопряжения, причем выход температурного датчика теплового расширений заголовки соединен с информационным входом блока выделения кмпульсоа, гактовый вход которого соединен с йнходом генератора импульсов, первый и второй так5 товые выходы блока выделения импульсов соединены соответственно с входами прямого и обратного счета счетчика м с первым и вторым тактовыми входами блокп коррекции вибрации, управляющий выход которого соединен со счетным входом первого блока масштабирования, выход которого соединен с первым входом элемента ИЛИ, информационные выходы счетчика соединены с соответствующими входами блока индикации и блоха коррекции накопления, управляющий выход которого соединен со счетным входом второго блока масштабирования, выход которого соединен с вторым входом элемента ИЛИ, выход включения блока задания программ соединен с входом сброса блока индикации, счетным входом блока коррекции накопления и первым входов гброса блока коррекции положения исполнительного механизма, выход которого соединён с входом блока сопряжения, выход которого соединен с входом коррекции блока задания программ, выход конца операции и вход пуска хоторого являются соответственно выходом конца операции и входом пуска устройства, выход начала работы блока задания программ соединен с входами сброса блока коррекции накопления, первого и второго блоков масштабирования и с вторым входом сброса блока коррекции положения исполнительного механизма, первый и второй выходы хода деления блока задания программ соединены соответственно с информационными входами первого и второго блоков масштабирования, выход датчика положения исполнительного механизма соединен с входом блока сопряжения, выход которого соединен с синхроаходами блока коррекции положения исполнительного механизма и
5 блока коррекции вибрации и со счетным
0
5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для программного управления | 1985 |
|
SU1325409A1 |
| Устройство для циклового программного управления | 1986 |
|
SU1383298A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТОВ | 2015 |
|
RU2597463C2 |
| Устройство для программного управления | 1977 |
|
SU623184A1 |
| Устройство для определения этапов прокатки | 1988 |
|
SU1533796A2 |
| Цифровая система управления | 1984 |
|
SU1234811A1 |
| Система для программного управления | 1989 |
|
SU1675847A1 |
| Устройство для автоматического копирования линии сварного соединения | 1983 |
|
SU1133060A1 |
| Устройство для программного управления многодвигательным гидроприводом | 1986 |
|
SU1425605A1 |


Изобретение относится к автоматике и может быть использовано при проектировании АСУ ТП и систем с числовым поограмм- ным управлением Цель изобретения - повышение точности обработки изделий за счет компенсации теплового расширения заготовок. Для этого в устройство, содержащее генератор импульсов, блок задания программ, блок коррекции вибрации, исполнительный механизм, датчик положения исполнительного механизма, первый блок масштабирования, блок коррекции положения исполнительного механизма и элемент ИЛИ, дополнительно введены температурный датчик теплового расширения заготовки, блок выделения импульсов, счетчик, блок индикации, блок коррекции накопления, второй блок масштабирования, два блока сопряжения. Изобретение позволяет повысить точность обработки за счет соответствующего изменения взаимного расположения заготовки и обрабатывающего узла с учетом теплового расширения заготовки и вибрации датчика температурного расширения. 17 ил (/ С
Фиг. 2
1-й проход заготовки
2-а проход 3-й проходIFU проход
заготовки заголюбки заготодш -/т 6 исходное состояние
Фи
фиг. б
ш
Фи.Ь
Т
По
фа а 6
фие.7
11
.
фиг 8
Физ.9
И Мф
Т
п
Г Г
х Ј3G±xi± c сгсгтга-атпт
г
Г и итги
п -
;
гпгптгт
псгипа
Oi-зпф
069C69L
21
2X 3
ЛП.
28
ГУП
21 25 55
Вых. 56
П
Фыг. 13
q п п
Х XTXDTTKTXTX
ii
11
ЛП.
г
58
t
n
Фыг. 13
l
t
q п пqjDLj
г1
ii
Фиг. 7 ,
LJ
П П П П П П /
П
фиг. 75
Д
/
30
Фие. Ю
73
П
72
fttr
t
t
t
Фие. П
| Устройство для программного управления | 1982 |
|
SU1057927A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Устройство для программного управления | 1982 |
|
SU1080119A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
