жительных устройства, усилитель, интегратор и функциональный преобра- .зователь. Сущность изобретения заключается в функциональном преобраИзобретение относится к системам управления и регулирования следящих устройств, работающих в режимах относительно плавного изменения входного сигнала (уставки), в частностИд к приводам копироваль плх станков или копирующих манипуляторов.
Целью изобретения является повышение надежности и безопасности работы системы путем уменьшения скорости исполнителвного органа при отработке болыйгх ступенчатых рассогласований.
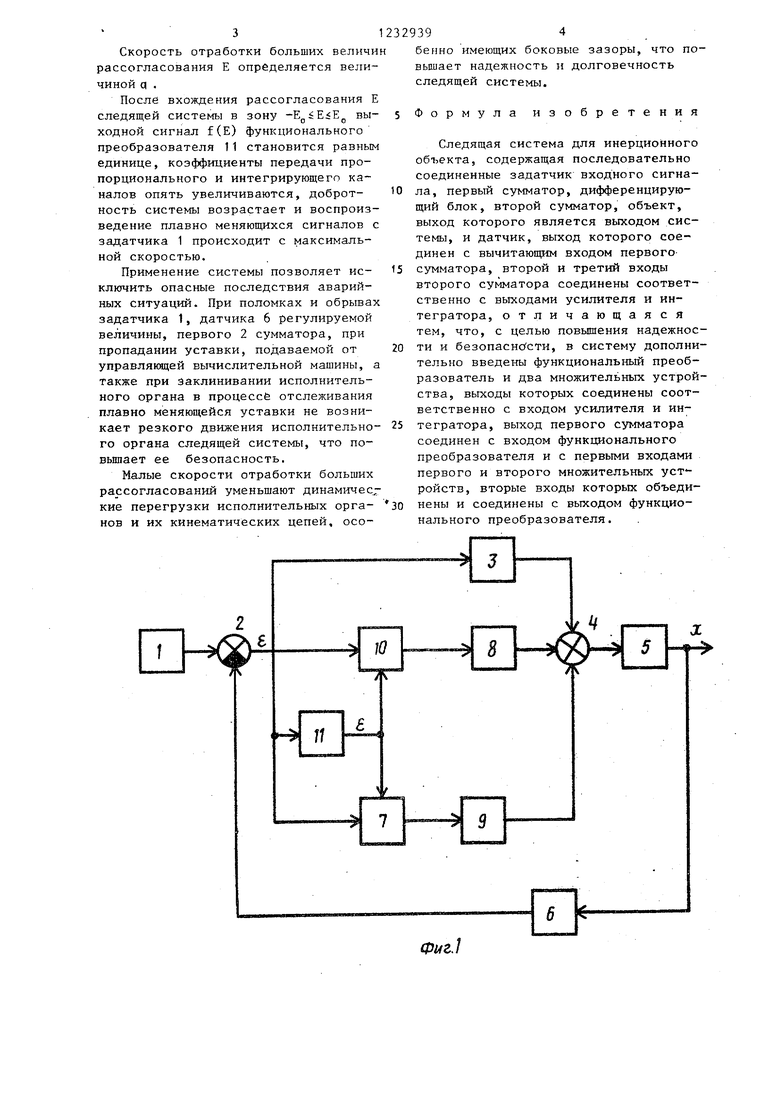
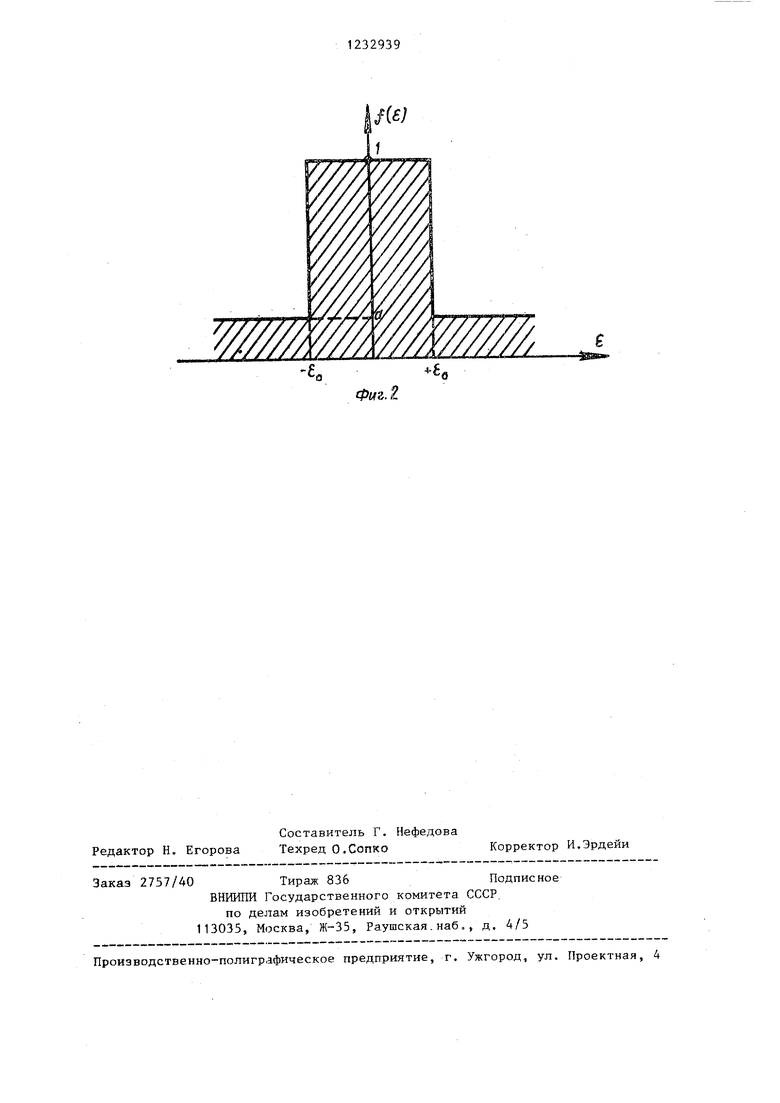
На фиг, I приведена функционгшь- ная схема следящей системы; на фиг. 2 - нелинейная зависимость, реализуемая функциональным преобразователем.
Следящая система содержит задат- чик 1 входного сигнала., первый 2 сумматорJ дифференцирующий блок 3. второй 4 сумматор, объект 5, датчик второе 7 множительное устройствоj усилитель 8j интегратор 9, первой 10 множительное устройство, функциональный, преобразователь 11,
В качестве объекта 5, включенного в следяптую систему, может быть использован только инерционньй объект не второго порядка, содержащий хотя бы один интегратора
Функциональный преобразователь 11 реализует функцию
f(E) Г пр«
ал При где а I,
Ь.
Если входной сигнал Е функционального преобразователя 11 по абсолютной в.еличине меньше некоторого заранее заданного при настройке значения EJJ , то выходной сигнал f{E) равен единице (множительнью устройства 7 и 10 имеют единичный коэффициент передачи),
зованки сигнала ошибки регулирования, а именно в уменьшении коэффициента усршения системы при больших значениях сигнала ошибки. 2 ил,
EcjiH же абсолютная величина Е превышает Е, то выходной сигнал f(E) принимает небольшое значение q , также заданное при настройке функционального преобразователя 11. При этом коэффициенты передачи множительных устройств 7 и 10 становятся значительно менылями единицы и равными q, что существенно уменьшает коэффициенты передачи усилителя 8 и интегратора 9,
Система работает следующим образом. Если уставка с выхода задатчика 1 изменяется плавно и максимальная
скорость ее лежит в допустимые: пределах, то опмбка Е следящей; системы в динамическом режиме за счет ас- татизма, вводимого интегратором 9, невелика и лежит в пределах /E/iEj,,
сигнал f(E) равен единице, а система обеспечИБает устойчивую отработку всех плавно меняющихся задающих воздействий с максимальной скоростью и высокими динамическими характеристикани за счет большой добротности, определяемой коэффициентами передачи пропорционального и интег- рирзпощего каналов.
При Скачкообразном изменении
рассогла.сованик Е, которое по абсолютному значению превысит Е, что может произойти в момент поломки датчика б регулируемой величины или
задатчика 1, а также при другой аварийной ситуации,, сигнал f(E) с выхода функционального преобразователя 1 1 резко уменьшается до величины q. В результате уменьшаются коэффициенты
передачи пропорционального и интег рирующего каналов и отработка рассогласования Е ведется с малой скоростью, поскольку коэффициент передачи цифференцирурощего канала не изменяется.
бенно имеющих боковые зазоры, что повышает надежность и долговечность следящей системы.
Скорость отработки больших величин рассогласования Е определяется величиной q .
После вхождения рассогласования Е
следящей системы в зону вы- 5 Формула изобретения ходной сигнал f(E) функционального преобразователя 11 становится равным единице, коэффициенты передачи пропорционального и интегрирующего каналов опять увеличиваются, доброт- Ю ность системы возрастает и воспроизведение плавно меняющихся сигналов с задатчика 1 происходит с максимальной скоростью.
Применение системы позволяет ис- 5 ключить опасные последствия аварийных ситуаций. При поломках и обрывах задатчика 1, датчика 6 регулируемой величины, первого 2 сумматора, при пропадании уставки, подаваемой от 20 управляющей вычислительной машины, а также при заклинивании исполнительного органа в процессе отслеживания плавно меняющейся уставки не возникает резкого движения исполнительно- 25 го органа следящей системы, что повышает ее безопасность.
Малые скорости отработки больших рассогласований уменьщают динамичес Следящая система для инерционного объекта, содержащая последовательно соединенные задатчик входного сигнала, первый сумматор, дифференцирующий блок, второй сумматор, объект, выход которого является выходом системы, и датчик, выход которого соединен с вычитающим входом первого- сумматора, второй и третий входы второго сумматора соединены соответственно с выходами усилителя и интегратора, отличающаяся тем, что, с целью повьппения надежности и безопаснс сти, в систему дополнительно введены функциональный преобразователь и два множительных устройства, выходы которых соединены соответственно с входом усилителя и интегратора, выход первого сумматора соединен с входом функционального преобразователя и с первыми входами первого и второго множительных устройств, вторые входы которых объединены и соединены с выходом функционального преобразователя.
кие перегрузки исполнительных органов и их кинематических цепей, особенно имеющих боковые зазоры, что повышает надежность и долговечность следящей системы.
5 Формула изобретения Ю
5 20 25
0
Следящая система для инерционного объекта, содержащая последовательно соединенные задатчик входного сигнала, первый сумматор, дифференцирующий блок, второй сумматор, объект, выход которого является выходом системы, и датчик, выход которого соединен с вычитающим входом первого- сумматора, второй и третий входы второго сумматора соединены соответственно с выходами усилителя и интегратора, отличающаяся тем, что, с целью повьппения надежности и безопаснс сти, в систему дополнительно введены функциональный преобразователь и два множительных устройства, выходы которых соединены соответственно с входом усилителя и интегратора, выход первого сумматора соединен с входом функционального преобразователя и с первыми входами первого и второго множительных устройств, вторые входы которых объединены и соединены с выходом функционального преобразователя.
./
1/(;
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлическая следящая система | 1985 |
|
SU1317189A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Система управления приводом летучих ножниц | 1977 |
|
SU746418A1 |
| Бинарная система управления | 1988 |
|
SU1697054A1 |
| Силовой следящий привод | 1984 |
|
SU1228070A1 |
| Система автоматического управления скоростью вращения ротора турбины | 1980 |
|
SU866247A2 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СИСТЕМА УПРАВЛЕНИЯ ИНЕРЦИОННЫМ ОБЪЕКТОМ (ВАРИАНТЫ) | 1999 |
|
RU2169938C2 |
| Устройство для позиционного управления электроприводом постоянного тока | 1981 |
|
SU1003286A1 |
Изобретение относится к следящим системам, работающим в режиме относительно медленного изменения входного сигнала. Целью изобретения является повьшение надежности и безопасности системы в работе путем уменьшения скорости исполнительного органа при отработке больших рассогласований. Система содержит задатчик входного сигнала, два сумматора, дифференцирующий блок, объект, датчик, два мно
Редактор Н, Егорова
Составитель Г. Нефедова Техред О.Сопко
Заказ 2757/40 Тираж 836Подписное
ВНИИПИ Государственного комитета СССР.
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская.наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Корректор И.Эрдейи
| Следящая система с нелинейной коррекцией | 1974 |
|
SU525051A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Ялышев А.У | |||
| и Зазоренов О.И | |||
| Многофункциональные аналоговые регулирующие устройства автоматики | |||
| - М, : Машиностроение, 1981, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
