Изобретение относится к электротехнике, в частности к устройствам автоматического управления электродвигателями постоянного тока независимого возбуждения, и может быть применено в системах управления общепромышленных электроприводов.
Целью изобретения является улучшение энергетических показателей работы электропривода при сохранении высокого быстродействия и стабилизации конечных координат.
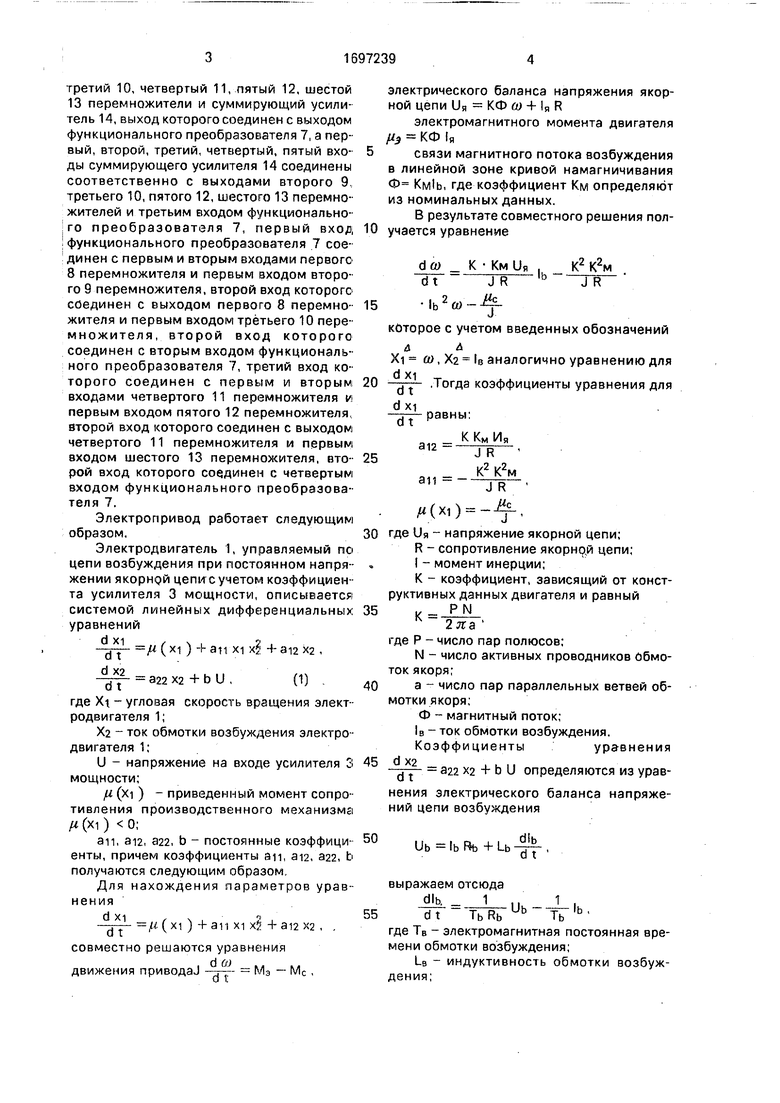
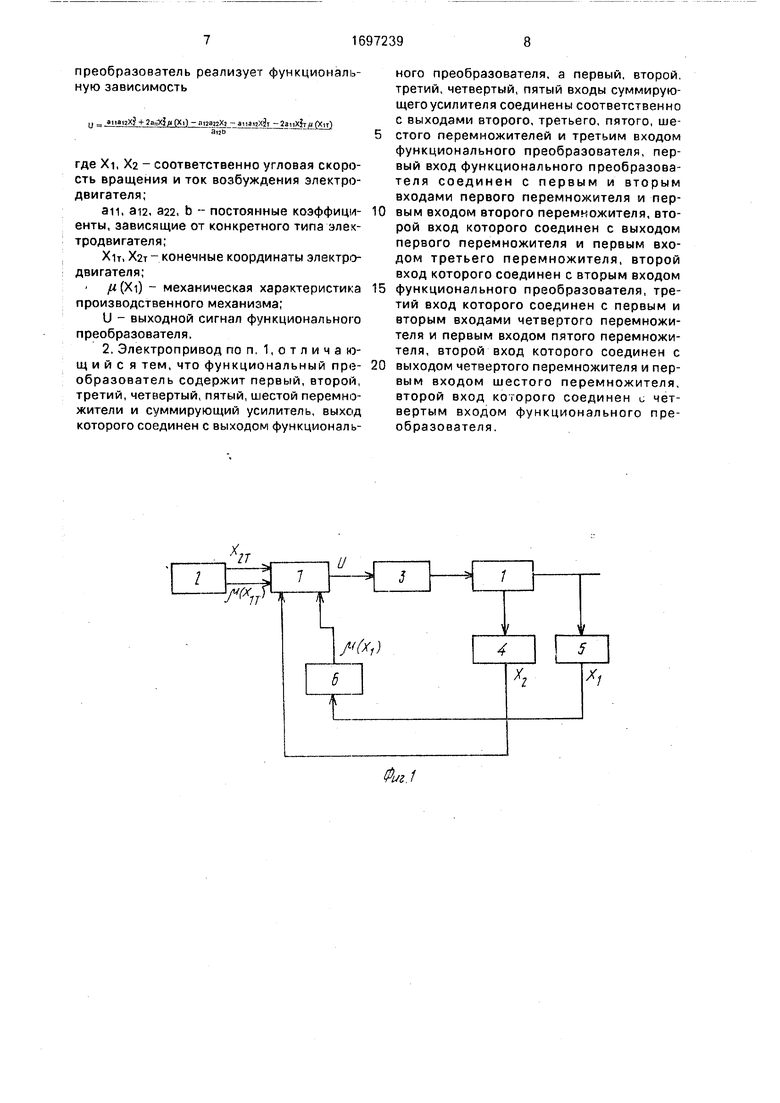
На фиг. 1 представлена схема электропривода; на фиг. 2 изображена структурная схема функционального преобразователя; на фиг. 3 изображены траектории координат электродвигателя; на фиг. 4 показаны для сравнения графики переходных процессов в устройстве-аналоге (А), устройстве-прототипе (В) и предлагаемом устройстве (С).
Устройство содержит электродвигатель 1, задающий блок 2, усилитель 3 мощности, выход которого соединен с обмоткой электродвигателя 1, датчик 4 тока возбуждения электродвигателя 1, датчик 5 скорости вращения электродвигателя 1, блок 6 механической характеристики производственного механизма, вход которого соединен с выходом датчика 5 скорости вращения электродвигателя 1, функциональный преобразователь 7, первый и второй входы которого соединены с первым и вторым выходами задающего блока 2, третий вход соединен с выходом датчика 4 возбуждения, четвертый вход с выходом блока 6 механической характеристики производственного механизма, выход функционального преобразователя 7 соединен с входом усилителя 3 мощности
Функциональный преобразователь 7 содержит (см. фиг. 2) первый 8, второй 9,
СП
с
о о 1
hO OJ
о
третий 10, четвертый 11, пятый 12, шестой 13 перемножители и суммирующий усилитель 14, выход которого соединен с выходом функционального преобразователя 7, а первый, второй, третий, четвертый, пятый входы суммирующего усилителя 14 соединены соответственно с выходами второго 9, третьего 10, пятого 12, шестого 13 перемножителей и третьим входом функционального преобразователя 7, первый вход функционального преобразователя 7 соединен с первым и вторым входами первого 8 перемножителя и первым входом второго 9 перемножителя, второй вход которого соединен с выходом первого 8 перемножителя и первым входом третьего 10 перемножителя, второй вход которого соединен с вторым входом функционального преобразователя 7, третий вход которого соединен с первым и вторым входами четвертого 11 перемножителя и первым входом пятого 12 перемножителя, второй вход которого соединен с выходом четвертого 11 перемножителя и первым входом шестого 13 перемножителя, второй вход которого соединен с четвертым входом функционального преобразователя 7.
Электропривод работает следующим образом.
Электродвигатель 1, управляемый по цепи возбуждения при постоянном напряжении якорнрй цепуг с учетом коэффициента усилителя 3 мощности, описывается системой линейных дифференциальных уравнений
dXt1 / ( xi ) + ац xi x§ + ai2 X2 ,
322 X2 + Ь U
(1)
где Xt - угловая скорость вращения электродвигателя 1;
Х2 - ток обмотки возбуждения электродвигателя 1;
U - напряжение на входе усилителя 3 мощности;
/г (Xi ) - приведенный момент сопротивления производственного механизма /ч (Xi ) 0;
an, ai2, 322, b - постоянные коэффициенты, причем коэффициенты аи, 312, aa2, b получаются следующим образом.
Для нахождения параметров уравнения
d xi9
,Ц(Х1 ) +311 Х1 Х2 +Э12Х2 , ,
совместно решаются уравнения d u
движения npneoflaJ
d t
Мэ - Mc
электрического баланса напряжения якорной цепи ия КФ а) + я R
электромагнитного момента двигателя
to ко ifl
связи магнитного потока возбуждения
в линейной зоне кривой намагничивания Ф , где коэффициент Км определяют из номинальных данных,
В результате совместного решения получается уравнение
do
К Км Uf
-TW
1ьК2К2м
d tJ Ru
-Ib2ft)- которое с учетом введенных обозначений
ил
Xi а), Х2 IB аналогично уравнению для
. Тогда коэффициенты уравнения для
d xi
равны:
dt
an К2К2м
JR
) -,
где Уя - напряжение якорной цепи; R - сопротивление якорно,й цепи; I - момент инерции; К - коэффициент, зависящий от конструктивных данных двигателя и равный ,, PN
14 2ла где Р - число пар полюсов;
N - число активных проводников Обмоток якоря;
а - число пар параллельных ветвей обмотки якоря;
Ф - магнитный поток;
IB - ток обмотки возбуждения.
Коэффициентыуравнения
-т-- 322 Х2 + b U определяются из уравнения электрического баланса напряжений цепи возбуждения
0
5
Ub Ib FH + U
выражаем отсюда
dlb.1
dt
dlb dt
Ub1
Tb
Ib
TbRb
где TB - электромагнитная постоянная времени обмотки возбуждения;
LB - индуктивность обмотки возбуждения;
RB - сопротивление цепи возбуждения.
ии
С учетом обозначений Xz IB. U Ue определяем коэффициенты в уравнеd X2
НИИ
d t b
1
322 -
1
Ть Rb
Статической характеристикой электродвигателя 1 в координатах Xi, X2 является экстремальная линия S, показанная на фиг. 3, которая описывается уравнением
/(Xi) + aiiXiX22 + ai2X2 0, с экстремумом в точке Хэ с координатами
. v. 2/г
Х1э
Х2э
4апум ai2
На управляющее воздействие U накладывается ограничение IU I Do, В данном устройстве уменьшаются энергетические затраты как в цепи возбуждения, так и в цепи якоря электродвигателя. Снижение энергетических затрат в цепи возбуждения обосновывается тем, что для электродвигателя постоянного тока, управляемого по цепи возбуждения, с математическим описанием (1) в задаче на минимум энергетических затрат по цепи возбуждения, который характеризуется минимумом квадрата тока возбуждения в интегральном критерии
J S
о
получается, что во всем пространстве координат существует множество особых управлений
aii3nX3+2aiiX(Xi)- aizagX; aijb
Тогда как при решении задачи быстродействия только на одной особой траектории Si (см. фиг. 3). Особое управление включается в оптимальную управляющую последовательность только на одной особой траектории в задаче быстродействия, а в задаче на минимум ресурсов - во всем пространстве координат электродвигателя. При использовании данного электропривода уменьшаются энергетические затраты в цепи якоря электродвигателя.
Траектории движения электропривода, реализуемые данным устройством, принадлежат области с меньшим перерегулированием амплитуды тока якоря. Из уравнения электрического баланса напряжений для якорной цепи
ия К Ф а) + я R
с учетом связи магнитного потока Ф и тока возбуждения ВФ Км в можно записать уравнение для тока якоря я I ия -ККМ Ь(о
1я R
Учитывая ограничение на допустимый ток якоря я.доп, из последнего уравнения можно определить область допустимых значений тока возбуждения в и скорости о).
при которых 1Я (я.доп
Ия (я.доп R 6 -ККМ О)
Последнее неравенство в плоскости координат Xi со , Х2 IB выделяет область с допустимыми ш и в для выполнения ограничений по я, которая лежит выше особой траектории Si в задаче быстродействия (см. фиг. 3) при (я.доп, равном 2,5 от номинального тока якоря, а реализуемые дан
ным устройством траектории принадлежат
этой области.
Использование в электроприводе добавки к особому
25-anai2X2T3 -2ацХ2т2//(Х1т)
ai2 b
управлению (2) позволяет обеспечить стабилизацию произвольных конечных координат электродвигателя. Таким образом
2Q использование управления, реализуемого, функциональным преобразователем 7 позволяет обеспечить асимптотическую устойчивость произвольных конечных координат электродвигателя.
35
Формула изобретения
1. Электропривод постоянного тока, содержащий электродвигатель, обмотка воз-л буждения которого подключена к усилителю мощности, датчик тока возбуждения и датчик скорости, выходы которых подключены соответственно к входу функционального преобразователя и к входу блока механиче45 ской характеристики производственного механизма, выход блока механической характеристики производственного механизма соединен с входом функционального преобразователя, задающий блок, о т л иCQ чающийся тем, что, с целью улучшения энергетических показателей работы электропривода при сохранении высокого быстродействия и стабилизации конечных координат электродвигателя,
ее первый и второй входы функционального преобразователя соединены с первым и вторым выходами задающего блока, выход функционального преобразователя соединен с входом усилителя мощности непосредственно, а функциональный
преобразователь реализует функциональную зависимость
U aiiai2X + 2aiiXJ(Xt)-ai;a;;X3 -nianxir -2ачХЗтл (Хп) ai2b
где XL X2 - соответственно угловая скорость вращения и ток возбуждения электродвигателя;
аи, ai2, 322, Ь - постоянные коэффициенты, зависящие от конкретного типа электродвигателя;
Xir, Х2т - конечные координаты электродвигателя;
// (Xi) - механическая характеристика производственного мехэнизма;
U - выходной сигнал функционального преобразователя.
2. Электропривод по п. 1, о т л и ч а ю- щ и и с я тем, что функциональный преобразователь содержит первый, второй, третий, четвертый, пятый, шестой перемножители и суммирующий усилитель, выход которого соединен с выходом функционального преобразователя, а первый, второй третий, четвертый, пятый входы суммирующего усилителя соединены соответственно с выходами второго, третьего, пятого, шестого перемножителей и третьим входом функционального преобразователя, первый вход функционального преобразователя соединен с первым и вторым входами первого перемножителя и первым входом второго перемножителя, второй вход которого соединен с выходом первого перемножителя и первым входом третьего перемножителя, второй вход которого соединен с вторым входом
функционального преобразователя, третий вход которого соединен с первым и вторым входами четвертого перемножителя и первым входом пятого перемножителя, второй вход которого соединен с
выходом четвертого перемножителя и первым входом шестого перемножителя, второй вход которого соединен о четвертым входом функционального преобразователя.
Фм.1

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1986 |
|
SU1394385A1 |
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1642558A1 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1545300A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Моментный вентильный электродвигатель | 1989 |
|
SU1742949A2 |
| Моментный вентильный электродвигатель | 1988 |
|
SU1624617A1 |
| Вентильный электродвигатель | 1983 |
|
SU1141526A1 |
| Реверсивный электропривод | 1991 |
|
SU1791951A1 |

Изобретение относится к электротехнике и может быть применено для управления электродвигателями постоянного тока. Целью изобретения является улучшение энергетических показателей работы электропривода при сохранении высокого быстродействия и стабилизации конечных координат. Устройство содержит электродвигатель 1, задающий блок 2, усилитель 3 мощности, выход которого соединен с обмоткой электродвигателя 1. Вход блока 6 механической характеристики производственного механизма соединен с выходом датчика 5 скорости. Входы преобразователя 7 соединены с выходами задающего блока 2 и с датчиком 4 тока возбуждения. В данном устройстве обеспечивается асимптотическая устойчивость произвольных конечных координат электропривода. 1 з.п. ф-лы,4 ил.
b
st
ir
Хгт
Фиг.З
Хг- Уя-1ядол# KKfltXi
X,slg} JffSjJ
Tf
С В
а
Л1Г
хю
/2Г
О 0,5 1,0
№ ° ° W 0,6 t,c
Фиг
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
