00
со ;
00 00
ел
Изобретение относится к электро-- технике, в частности к устройствам автоматического управления электродвигателями постоянного тока независимого возбуждения, обеспечивающим оптимальное по быстродействию управление скоростью вращения электродвигателя путем изменения потока возбуждения, и может быть применено в систе- мах управления общепромьшшенных электроприводов..
Цель изобретения - повьшение быстродействия путем устранения вибрации сигнала управления, повьшение КПД электродвигателя и расширение функциональных возможностей.
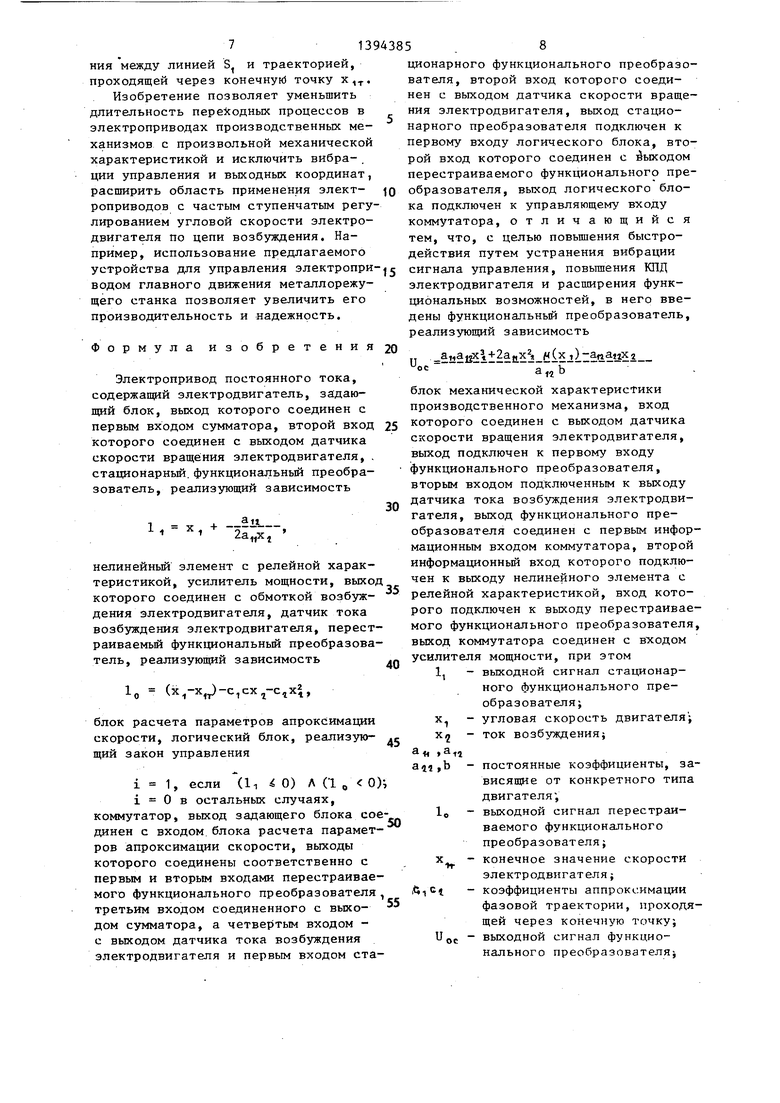
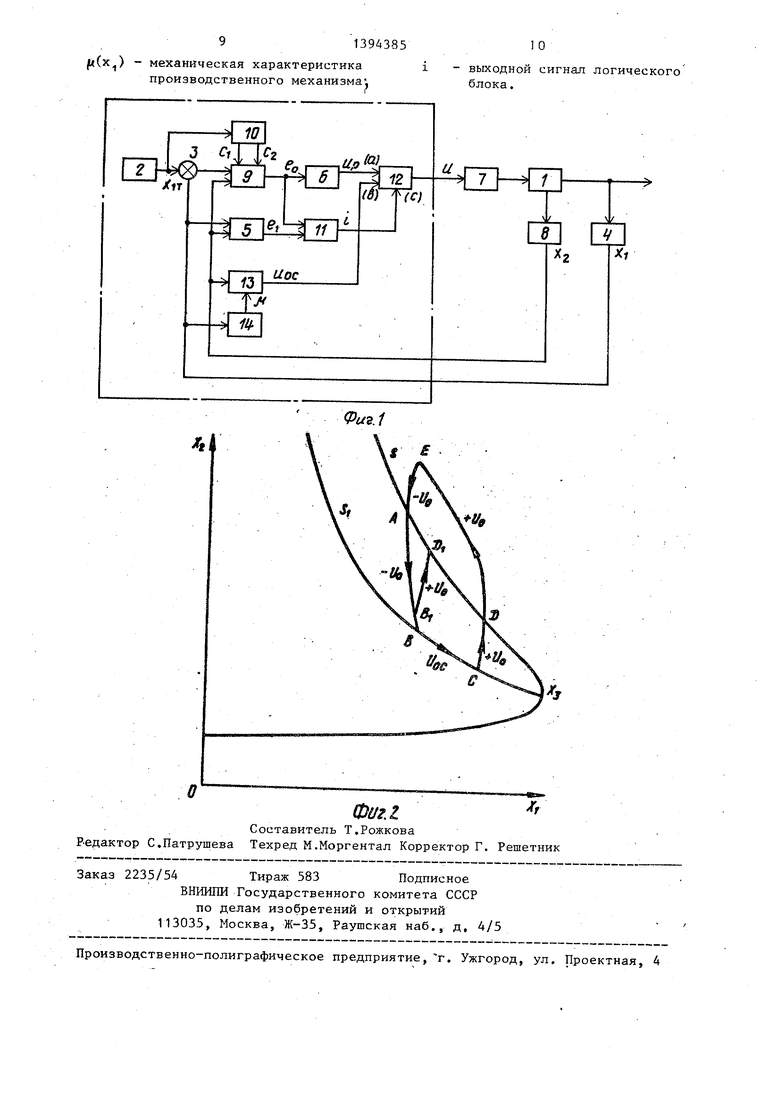
На фиг. 1 представлена структурная схема электропривода; на фиг.2 - траектории координат электропривода.
Электропривод постоянного тока содержит электродвигатель 1, задающий блок 2, выход которого соединен с первым входом сумматора 3, второй вход которого соединен с выходом датчика 4 скорости вращения электродви- (гателя 1, стационарный функциональный преобразователь 5, нелинейный элемент 6 с релейной характеристикой
усилитель 7 мощности, выход которого соединен с обмоткой возбуждения электродвигателя 1, датчик 8 тока возбуждения электродвигателя 1, перестраиваемый функциональный преобразователь 9, блок 10 расчета пара- метров апроксимации скорости, логический блок 11 и коммутатор 12. Выход задающего блока 2 соединен с входом блока 10 расчета параметров апроксимации скорости, выходы которого сое- динены соответственно с первым и вторым входами перестраиваемого функционального преобразователя 9, третьим входом соединенным с выходом сумматора 3, а четвертым входом - с выходом датчика 8 тока возбуждения электродвигателя 1 и первым входом стационарного функционального преобразователя 5. Второй вход стационарного преобразователя 5 соединен с выходом датчика 4 скорости вращения электродвигателя 1. Выход стационарного функционального преобразователя 5 подключен к первому входу логического блока 11, второй вход которого соединен с выходом перестраиваемого функционального преобразователя 9. Выход логического блока 11 подключен к управляющему входу коммутатора 12.
Кроме того, электропривод содержит функциональный преобразователь 13 и блок 14 механической характеристики производственного механизм, вход которого соединен с выходом датчика 4 скорости вращения электродвигателя 1. Выход блока 14 механической характеристики производственного механизма подключен к первому входу функционального преобразователя 13, вторым входом подключенным к выходу датчика 8 тока возбуждения злектроу двигателя 1. Выход функционального преобразователя 13 соединен с первым информационным входом коммутатора 12, второй информационньм вход которого подключен к выходу нелинейного элемента 6 с релейной характеристикой Вход нелинейного элемента 6 с релейной характеристикой подключен к выходу перестраиваемого функционального преобразователя 9. Выход коммута- - тора 12 соединен со входом усилителя 7 мощности.
Электропривод работает следующим образом.
Электродвигатель 1, управляемый по цепи возбуждения, с учетом коэффициента усилителя 7 мощности- описывается системой нелинейных дифференциальных уравнений
-dxj. dt
f(,,x,.,,;
3,j2 -x
.-HbU ,
(1)
угловая скорость электродвигателя j
ток обмотки возбуждения; напряжение на входе усилителя;
приведенный момент сопротивления производственного механизмаj
b,a а
11
Я
а 0(1
постоянные коэффициенты. В соответствии с ограничением напряжения обмотки возбуждения на управляющее воздействие U накладывается ограничение |U | Uj. Множеством статических состояний электродвигателя 1 в координатах х,, х является экстремальная линия Sy которая описывает ся уравнением
а„ х,х2 -f а
О
(2)
и показана на фиг.. 2. В зависимости от механической характериЬтики производственного механизма fc(x,) с целью обеспечения статической устойчивости используются различные ветви линии S. В случае момента сопротивления, не зависящего от скорости, линейно возрастакнцей механической харатеристики и нелинейно спадающей механи ческой характеристики рабочим участком линии S является ветвь, расположенная вьше точки экстремума; в случае параболической механической характеристики в качестве рабочего участка может использоваться ветвь линии S,;лежащая ниже точки экстремума х
На фиг. 2 показаны фазовые траектории для .реализации оптимального по быстродействию управления электродвигателем 1, если используется ветв линии S, лежащая выше точки экстремума Ху. В зависимости от граничных условий х(0), х(Т), где х(0) (х „, X 2,) - исходное состояние, х(Т) (х, Xj) - конечное состояние электродвигателя 1, принадлежащих линии S изменяется число интервалов оптимального по быстродействию управления.
В режиме разгона для получения больших угл,овых скоростей X it траектория состоит из трех участков: АВ - участок движения при U -U, ВС - участок движения при 1иГ Uo, CD - участок движения при U Uoi в режиме разгона до меньших скоростей траектория состоит из двух участков: АВ - под управлением
и -и, управлением U +Ug, в режиме торможения для получения х X ,0 траектория всегда состоит из двух участков: DE - участок
движения при и +U 5, ЕА - участок движения при U -Uo.
Участок ВС лежит на линии оптимального движения Si
X . .aj
X ;
, которая реализуется ным управлением
и
of
Sli§«2Sil2a«x f((x,)-aj4aj i.
a,,b
получаемого из совместного решения уравнений (1) и (3) или с применением
условий общности положения для нелинейных систем.
Конечные состояния х(Т) в зависимости от граничных условий лежат на линиях переключения CD и ЕЛ, которые описываются приближенным уравнением
С,х, +
С„х
г
(5)
где С
1
Cj коэффициенты аппроксимации фазовых траекторий,проходящих через конечные точки D и А при управлении и tUj. Значения коэффициентов С, и Cj зависят от величины заданной скорости х,т .
Отклонения движения системы от рассматриваемых участков оптимальной траектории оцениваются функциями
1,
аг1
2а«х „ (x,-x,)-CiX,-C,x
(6)
В
1 о и 1,
электроприводе сигналы i о -. получают с помощью перестраиваемого и стационарного функциональных преобразователей 9 и 5 как результат обработки выходных сигналов датчиков 4 и 8 и сумматора 3. Причем перестраи ваемый функциональньш преобразователь 9 настраивается автоматически в соответствии с текущими значениями
параметров С, и С, вырабатываемыми блоком 10 расчета параметров.
Блок 10 также является функциональным преобразователем, который роизводит расчет параметров С, ,
С приближенной кривой, проходящей через конечную точку х. Оптимальное управление Uo вьфабатьтается ункциональным преобразователем 13 в зависимости от сигналов датчика 8 и
блока 14 механической характеристики производственного механизма, который также является функциональным преобразователем, определяющим значения ,) по сигналам от датчика 4.
55
Для реализации требуемых оптимальных по быстродействию последсватель- ностей управляющих воздействий U, зависящих от граничных условий х(0), х(Т) и текущих значений координат X, и Xj, в устройстве формируется переменная структура управления по отклонению вида
и
Up, если i 0;
(7)
если i
1,
где ,sipnlj - релейное управление, реализуемое нелинейным элементом 6;
UJP - непрерывное особое управление (4),формируемое функциональным преобразователем 13;
i - выходной сигнал логического блока 11, поступающий на вход (с) коммутатора 12.
Значения сигнала i и, следова- тельно, структура управления (7) зависит от координат электродвигателя 1 относительно линии оптимального движения S и траектории, проходящей через конечную точну х,. В случае расположения граничных условий на ветви линии S, лежащей вьппе точки экстремума х д, логический блок 11 вьфабатывает следующий алгоритм
il, если 1. (8). О в остальных случаях.
Коммутатор 12 представляет собой управляемьй контакт, осуществляющий переключение структуры управления (7), т.е. определяющий прохождение на вход усилителя 7 сигнала U р от нелинейного элемента 6 или сигнала Uoc от функционального преобразователя 13 в зависимости от значения сигнала i логического блока 11.
Рассмотрим работу устройства в режиме разгона электродвигателя 1 при большом перепаде скоростей х и х,, соответствующих точкам А и D статистической характеристики S (фиг. 2). При поступлении на вход блока 10 задающего воздействие х , вырабатываются значения параметров С и Cj и производится настройка пе- рестраиваемого функционального преобразователя 9. Сигналы, с датчиков 4 и 8 и сумматора 3 поступают на вхо ды перестраиваемого и стационарного функциональных преобразователей 9 и 5. Последние производят расчет теку
0 5
0
5 0
5
щих значений отклонений 1g О и 1 О, подающихся на входы нелинейного элемента 6 и .логического блока 11. Блок 14 механической характеристики производственного механизма вьфабатывает текущие значения момента сопротивления ju (х,) по сигналам с датчика 4. Сигналы с датчика 8 и блока 14 поступают на входы функционального преобразователя 13, формирующего управление Ug. С входа нелинейного элемента 6 снимается релейное управление Up U signlp -Uo. Управления Up -Uj и Uoc подаются соответственно на входы (а) и (Ь) коммутатора 12. На выходе логическо- .го блока 11 формируется управляющий сигнал , который поступает на вход (С) коммутатора 12, при этом к входу усилителя 7 подключается управление и -Up, электродвигатель 1 приходит в движение, соответствующее перемещению изображающей точки (х,, х) по отрезку АВ (фиг. 2). По мере разгона изображающая точка совпадает с точкой В, вьшолняются условия 1, 0и1о 0, на выходе логического блока 11 формируется сигнал , коммутатор 12 подключает к усилителю 7 непрерьгоное управление UQ с функционального преобразователя 13, при котором изображакщая точка (х, X 2) перемещается по оптимальной траектории ВС. В точке С выполняется условие 1о О, логический блок 11 вырабатывает сигнал , при этом коммутатор 12 производит подключение к входу усилителя 7 управления и - и о с выхода нелинейного элемента 6, изображающая точка (х, х) движется по отрезку СД до попадания в точку D, где х х. При разгоне до меньших значений угловой скорости, когда на первом интервале управления U -Uo траектории не входят в область 1,0, или в режиме торможения электродвигателя 1 устройство работает под воздействием только релейного управления Up UoSignlo. В случае задания граничных условий х(0) и х(Т) на ветви статической характеристики S, лежащей ниже точки экстремума х, работа устройства протекает аналогично с учетом топологии траекторий, определяемой отклонениями 1 о и 11 При этом в устройстве не возникает нежелательного режима скользящего движения между линией S и траекторией, проходящей через конечнун) точку х,т«
Изобретение позволяет уменьшить длительность пере содных процессов в электроприводах производственных механизмов с произвольной механической характеристикой и исключить вибрации управления и выходных координат, расширить область применения элект- роприводов с частым ступенчатым регулированием угловой скорости электродвигателя По цепи возбуждения. Например, использование предлагаемого устройства для управления электропри водом главного движения металлорежущего станка позволяет увеличить его производительность и надежность.
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель, задающий блок, выход которого соединен с первым входом сумматора, второй вход которого соединен с выходом датчика скорости вращения электродвигателя, , стационарный, функциональный преобразователь, реализующий зависимость
.§«-1 -I X,
2а„х
35
нелинейньш элемент с релейной характеристикой, усилитель мощности, выход которого соединен с обмоткой возбуждения электродвигателя, датчик тока возбуждения электродвигателя, перест- раиваемьй функциональньй преобразователь, реализующий зависимость «
1о (,-c,cxj-c x|,
блок расчета параметров апроксимации скорости, логический блок, реализую- ., щий закон управления
, если di 40) Л (1 о 0)i i О в остальных случаях, коммутатор, выход задающего блока соединен с входом, блока расчета параметров апроксимации скорости, выходы которого соединены соответственно с первым и вторым входами перестраиваемого функционального преобразователя , третьим входом соединенного с выхо- дом сумматора, а четвертым входом - с выходом датчика тока возбуждения электродвигателя и первым входом стад
0
5
0
5
«
,
ционарного функционального преобразователя, второй вход которого соединен с выходом датчика скорости вращения электродвигателя, выход стационарного преобразователя подключен к первому входу логического блока, второй вход которого соединен с выходом перестраиваемого функционального преобразователя, выход логического блока подключен к управляющему входу коммутатора, отличающийся тем, что, с целью повьшения быстродействия путем устранения вибрации сигнала управления, повышения КПД электродвигателя и расширения функциональных возможностей, в него введены функциональньй преобразователь, реализующий зависимость
п §м 1Йл12ас. j)3:anajj.x 2
ос я Ь
а,2 D
блок механической характеристики производственного механизма, вход которого соединен с выходом датчика скорости вращения электродвигателя, выход подключен к первому входу функционального преобразователя, вторым входом подключенным к выходу датчика тока возбуждения электродвигателя, выход функционального преобразователя соединен с первым информационным входом коммутатора, второй информационньш вход которого подключен к выходу нелинейного элемента с релейной характеристикой, вход которого подключен к выходу перестраиваемого функционального преобразователя, выход коммутатора соединен с входом усилителя мощности, при этом
1, - выходной сигнал стационарного функционального преобразователя;
х - угловая скорость двигателя;
х - ток возбуждения;
1 Т7
а4,Ь - постоянные коэффициенты, зависящие от конкретного типа двигателя ,
1о выходной сигнал перестраиваемого функционального преобразователя; х - конечное значение скорости
ТТ
электродвигателя; - коэффициенты аппроксимации
фазовой траектории, проходящей через конечную точку; и Д5 - выходной сигнал функционального преобразователя;
|U(x) - механическая характеристика производственного механизма .
10
- выходной сигнал логического блока.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1987 |
|
SU1458960A2 |
| Электропривод | 1981 |
|
SU964938A1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2092964C1 |
| БЕСКОНТАКТНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 2017 |
|
RU2658678C1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| Реверсивный электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1394383A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Реверсивный электропривод постоянного тока | 1987 |
|
SU1422351A1 |
| Электропривод постоянного тока | 1989 |
|
SU1697239A1 |
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
Изобретение относится к электротехнике, в частности к устройствам автоматического управления электродвигателями постоянного тока незави- симого возбуждения, обеспечивающим оптимальное по быстродействию управ ление скоростью вращения путем изменения потока возбуждения,и.м.б. применено в системах управления общепромышленных электроприводов. Цель изобретения - повышение быстродействия путем устранения вибрации сигнала управления, повышение КПД электродвигателя и расширение функциональных возможностей. Электропривод содержит дополнительный функциональный преобразователь, позволяющий реализовать особую оптимальную траекторию в функции координат электропривода, и блок механической характеристики производственного механизма, позволякщий использовать различные ветви статической характеристики электродвигателя. 2 ил. (Л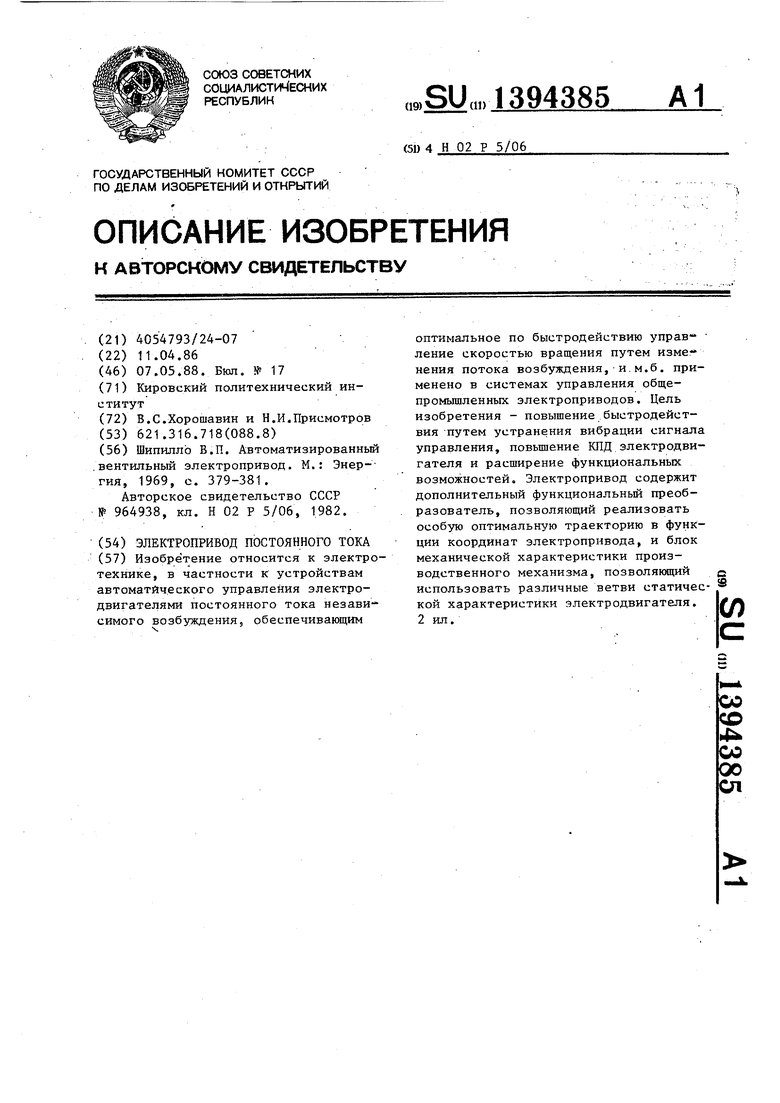
Фиъ. 1
Фиг.1
Составитель Т.Рожкова Ведактор С.Патрушева Техред М.Моргентал Корректор Г. Решетник
Заказ 2235/54 Тираж 583 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д, 4/5
file
| Шипилло В.П | |||
| Автоматизированный .вентильный электропривод | |||
| М.: Энергия, 1969, с | |||
| Дальномер | 1922 |
|
SU379A1 |
| Электропривод | 1981 |
|
SU964938A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
