Изобретение относится к станкостроению и предназначено для использования в многошпиндельных стайках с ЧПУ, обрабатывающих центрах, гибких производственных модулях.
На фиг. 1 показано устройство, общий чид (вид сверху); на фиг. 2 - вид А на фиг. 1 (повернуто); на фиг. 3 - инструментальный магазин; на фиг. 4 - вид Б на фмг. 3; на фиг. 5 - вид В на фиг. 2; на фиг. 6 - вид фиг, Б.
Устройство для азтоматической смены инструмента на многошпиидельном станке содержит инструментальный мзгззин 1, расположенный на основании 2 станка, основной манипулятор 3, осуществляющий транспортировку инструмента 4 из магазина 1, дополнительный манипулятор 5, который транспортирует мж-. --г основного манипулятора 3 к шп л. 8 бабок 7 и обратно.
Каретка 8, нг которой установлены шпиндельные бабки 7, имеет возможность только вертикального перемещения по направляющим стойки 9. С другой стороны станка расположено устройство автоматической смены заготовок 10 со столами-спутниками 11. Основной манипулятор 3 состоит из сднозахватных механических рук 12, число которых равно числу шпмндалей 6, V привода 13, с помощью которогоосущесталяются движения рук,
Механические руки 12 имеют два движений; возвратно-поступательное (движение захвата инструмента) и поворот на 180° (кантовка инструмента).
о
ч
о со
CS
Для выполнения возвратно-поступательного движения PVK. в приводе 15 предусмотрен {идроцилиидр 4, шток 15 которого выполнен в виде зубчатой рейки, взаимо- дейс:«у 01чьй с т/бчатым колесом 16, и колеса 17, взаимодействующие с рейками 18, выполненными на гильзах 19.
Поворот на 130° механической руки 12 выполняется тол ко в выдвинутом положении с помощью i мдроцилиндра 20, встроенного а корпус1 привода 13, и реек 21, взаимодействующих с зубчатыми колесами 22, усгаииа, еинь ми на осях 23, несущих рейки 18. Соедини гельные тяги 24. связыва- ощие мел- 4У Ьой оси 25 и 26, и тяги 27, cibijeidonjutne ики 21 со штоком гидроци- ничдра о. соединяют механические руки 12 и привод 13 в единый блок, позволяя осуществлять передачу каждого движения от привода всем рукам одновременно.
Конструкция основного манипулятора 3 имеет секционный принцип построения, что позволяет наращивать количество секции (механических рук) в случае увеличения числа шпинделей, не изменяя конструкции ус- тройства для автоматической смены инструмента.
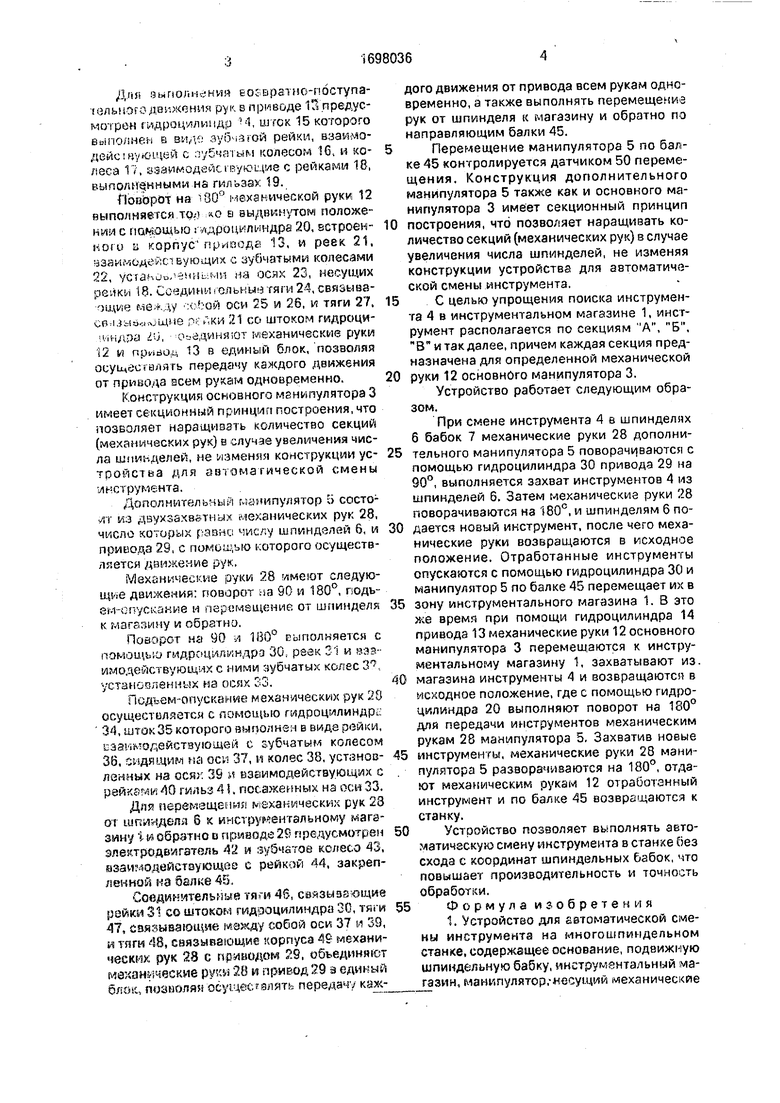
Дополнительный ьзамипулятор 5 состоит из двухзахватных механических рук 28, число которых равно числу шпинделей 6, и привода 29, с помощью которого осуществляется движение рук.
Механические руки 28 имеют следующее движения: поворот на 90 и 180°, подъем-опускание и перемещение от шпинделя к магазину и обратно.
Поворот на 90 и 180° выполняется с помощью гидроцилиндра 30, реек 31 и взаимодействующих с ними зубчатых колес З7, установленных на осях 33.
Подъем-опускание механических рук 28 осуществляется с помощью гидроцилиндрс 34, шток35 которого выполнен в виде рейки, взаимодействующей с зубчатым колесом 36, сидящим на оси 37, и колес 38, установленных на осях 39 л взаимодействующих с рейказди 40 гильз 41, посаженных на оси 33.
Для перемещений механических рук 28 01 шпинделя 6 к инструментальному магазину и обратно в приводе 29 предусмотрен электродвигатель 42 и зубчатое колесо 43, взаимодействующее с рейкой 44, закрепленной на балке 45.
Соединительные тяги 46, связывающие рейки 31 со штоком гидроцилиндра 30, тяги 47, связывающие между собой оси 37 и 39, и тяги 48, связывающие корпуса 49 механических рук 28 с приводом 29, объединяют механические руки 28 и привод 29 в единый блок, позволяя осуществлять передачу каж
дого движения от привода всем рукам одновременно, а также выполнять перемещение рук от шпинделя к магазину и обратно по направляющим балки 45.
Перемещение манипулятора 5 по балке 45 контролируется датчиком 50 перемещения. Конструкция дополнительного манипулятора 5 также как и основного манипулятора 3 имеет секционный принцип
0 построения, что позволяет наращивать количество секций(механических рук) в случае увеличения числа шпинделей, не изменяя конструкции устройства для автоматической смены инструмента.
5 С целью упрощения поиска инструмента 4 в инструментальном магазине 1, инструмент располагается по секциям А, Б, В итак далее, причем каждая секция предназначена для определенной механической
0 руки 12 основного манипулятора 3.
Устройство работает следующим образом.
При смене инструмента 4 в шпинделях 6 бабок 7 механические руки 28 дополни5 тельного манипулятора 5 поворачиваются с помощью гидроцилиндра 30 привода 29 на 90°, выполняется захват инструментов 4 из шпинделей 6, Затем механические руки 28 поворачиваются на 180°, и шпинделям 6 по0 дается новый инструмент, после чего механические руки возвращаются в исходное положение. Отработанные инструменты опускаются с помощью гидроцилиндра 30 и манипулятор 5 по балке 45 перемещает их в
5 зону инструментального магазина 1. В это же время при помощи гидроцилиндра 14 привода 13 механические руки 12 основного манипулятора 3 перемещаются к инструментальному магазину 1, захватывают из.
0 магазина инструменты 4 и возвращаются в исходное положение, где с помощью гидроцилиндра 20 выполняют поворот на 180° для передачи инструментов механическим рукам 28 манипулятора 5. Захватив новые
5 инструменты, механические руки 28 манипулятора 5 разворачиваются на 180°, отдают механическим рукам 12 отработанный инструмент и по балке 45 возвращаются к станку.
0 Устройство позволяет выполнять автоматическую смену инструмента в станке без схода с координат шпиндельных бабок, что повышает производительность и точность обработки.
5 Формула изобретения
1. Устройство для автоматической смены инструмента на многошпиндельном станке, содержащее основание, подвижную шпиндельную бабку, инструментальный магазин, манипулятор,ч-несущий механические
руки, кинематически связанные с приводом их перемещения, отличающееся тем, что, с целью повышения производительности и точности обработки, оно снабжено дополнительным манипулятором, несущим двухзахватные механические руки, кинематически связанные с приводом их перемещения и выполненные с возможностью поворота и перемещения в плоскостях, перпендикулярных и перпендикулярных и параллельных плоскости основания, а шпиндельная бабка смонтирована с возможностью перемещения в плоскости, пер- пендикулярной плоскости основания.
0
причем дополнительный манипулятор выполнен с возможностью взаимодействия с основным манипулятором в плоскости, параллельной плоскости основания.
2. Устройство по п. 1,отличающее- с я тем, что приводы поворота и возвратно- поступательного перемещения механических рук основного и дополнительного манипуляторов выполнены раздельными, а кинематическая связь механических рук каждого манипулятора со своими приводами и между собой выполнена посредством соединительных тяг.
Щ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Станок с устройством автоматической смены инструмента | 1987 |
|
SU1472209A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство для автоматической смены инструментов на металлорежущем станке | 1981 |
|
SU1034869A1 |
| Автооператор для автоматической смены инструмента | 1984 |
|
SU1255371A1 |
| Многооперационный станок портального типа | 1989 |
|
SU1742029A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Металлорежущий станок с автоматической сменой инструмента | 1978 |
|
SU770736A1 |



Изобретение относится к станкостроению и предназначено для использования в многошпмндельных станках с ЧПУ, обрабатывающих центрах, гибких производственных модулях. Цель изобретения - повышение производительности и точности обработки. На основании 2 станка расположены инструментальный магазин 1, основной манипулятор 3 с однозахвзтными механическими руками 12, дополнительный манипулятор 5 с двухзахватными механическими руками 28, подвижная шпиндельная бабка 7 с возможностью перемещения в плоскости, перпендикулярной плоскости основания. Механические руки 28 кинематически связаны с приводом 2G юл перемещения и выполнены с возможностью поворота и перемещения в плоскостях, перпендикулярных и параллельных плоскости основания. Основной 3 и дополнительный 5 манипуляторы взаимодействуют друг с другом в плоскости пйоапль ькой плоскости основания, 1 з.п. ф-лы, 6 ил. (Л
t n
U
Л 22 И 22 II II
9QW
ещ
9S08691
ч:
. ъ /
. I U
Вид Г
Фаг. 6
| Патент США № 4227296, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
