(54) ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ ПАВЕСНЫМИ СЕЛЬСКОХОЗЯЙСТВЕННЫМИ ОРУДИЯМИ
лення в силовом гидроцилиндре при высотном регулировании.
Это достигается тем, что рабочая полость гидроаккумулятора сообщена с замкнутой полостью управления, образуемой подпружиненным золотником и неподвижным плунжером, которьп установлен внутри золотника.
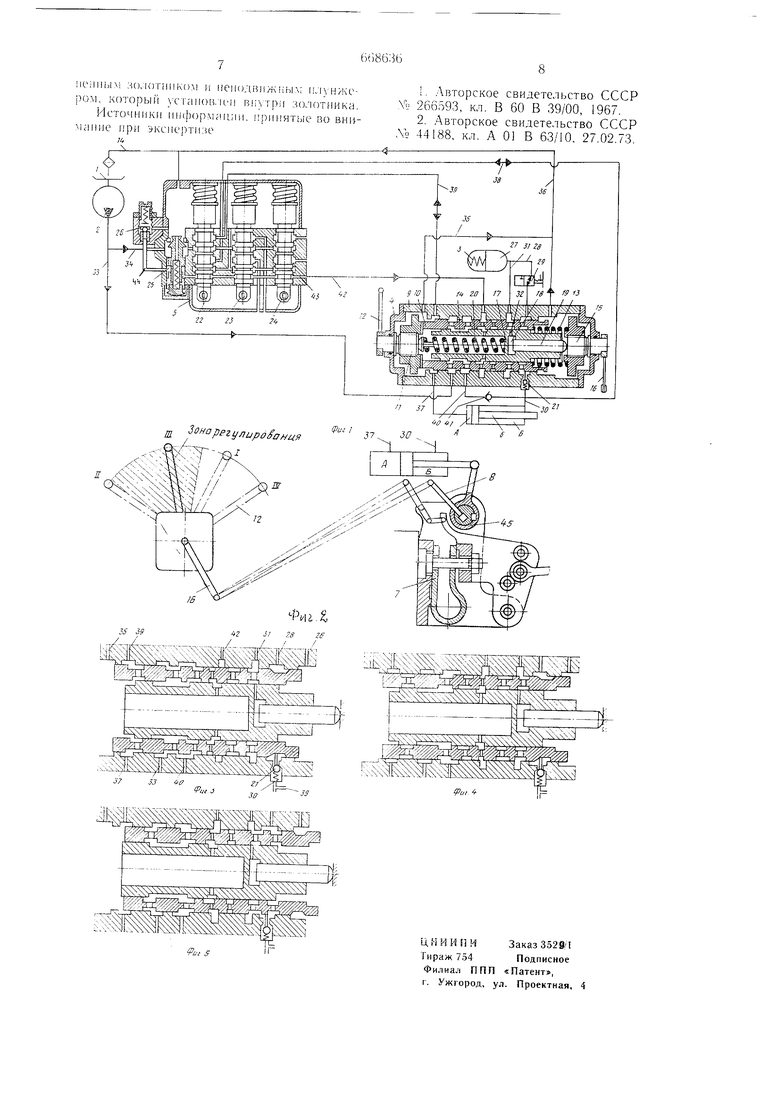
Ыа фиг. 1 изображена гидравлическая схема системы (относительное расположение :1ол()тника и гильзы в корпусе регулятора соответствует рабочему положению орудия в режиме до1р зки); на фиг. 2 - кинематическая схема рычагов и тяг управления ре улятором силового и позиционного регулирования; па фиг. 3 - относительное расположение золотника и гильзы в корпусе регулятора при подъеме орудия в транспортное ноложепне; на фиг. 4 - то же, при транспо|ггном положении орудия; на фиг. 5 - то же. при опускании орудия в рабочее по.южение.
Гидравлическая система управления навесными ссльско.хозяйственными орудиями состоит из бака 1, гидрав.жческого насоса 2, гидроаккумулятора 3, регулятора 4, распреД1.;1пте.1я 5. силового гидроцилиндра 6, датчиков 7 и 8 сигналов силового и позиционного ре1улирования. В корпусе 9 регулятора установлена гнльза 10, управляемая через ииитовук) пару 11 рукояткой 12. С противопо.южной стороны гильза поджата к торцу rafiKii 11р жиной 13. Внутри гильзы установлен золотник 14, связанный через винтовую пару 15, рычаг 16, систему рычагов и тяг с .датчиками сигналов силового и позиционного регу.шрования. Внутренняя полость золотника разделена глу.хой перемычкой 17, с одной cтopoF ы которой находится полость унравлепия 18, образованная перемычкой золотника и торцом плунжера 19, помещенного внутри золотника. С другой стороны в перемычку упирается пружина 20. В корпусе регулятора расположен управляемый запорный клапан 21.
Распределитель содержит золотник 22 для управления силовым гидроцилиндром, золотники 23 и 24 для управления дополнитель1п 1ми гидронилиндрами, перепускной 25 и ||редохранительньп1 26 клапаны.
Рабочая полость 27 гидроаккумулятора магистралью 28 с запорным краном 29, проточками в корпусе и гильзе регулятора через управ,шемый запорный клапан 21 и магистраль 30 сообщена с полостью Б подъема СПЛОВО1Ч) гидроцилиндра и магистралью 31 через нроточки в корпусе и гильзе регулятора и отверстие 32 в золотнике с полостью у и 1 а в л е и и я з ол от и и ко м.
гулятор и распределитель подключены к гидронасосу напорными магистралями 33 и .34. Регулятор сообщен также сливными машстралямн 35 и 36 с баком, магистралью 37 с полостью опускания А силового гидроцилиндра, магистралями 38 и 39 с золотником 22 распределителя, магистралью 40 через обратный клапан 41 с полостью подъема Б гидроцилиндра и магистралью 42 с каналом управления 43 перепускного клалана 25. С баком раснределитель сообщен сливной магистралью 44. Датчик сигналов нозиционного регулирования 8 закреплен на силовом валу 45.
Гидравлическая система при позиционном силовом и высотном регулировании работает следующим образом. Золотники 22, 23 и 24 распределителя 5 устанавливают в положение нейтраль. При этом масло от гидронасоса 2 поступает в сливную магистраль 44 и далее в бак 1, а если перепускной клапан 25 закрыт, то по магистрали 33 в регулятор 4. Перепускной клапан 25 открыт и соединяет напорную магистраль 34 со сливной магистралью 44, когда канал управления 43 сообщен со сливной .магистралью 35 через проточки регулятора, и перекрывает
напорную магистраль 34 от сливной 44, когда канал 43 сообщения со сливом не имеет. Управление системой осуществляется рукояткой 12 регулятора.
В режиме высотного регулирования датчики сигналов силового 7 и позиционного 8 регулирования отсоединены от рычага 16, запорный кран 29 открыт и соединяет рабочую полость 27 гидроаккумулятора с полостью Б подъема силового гидроцилиндра. Опускание орудия в рабочее положение осуществляется установкой рукоятки 12 в крайнее нижнее положение П зоны регулирования (см. фиг. 2, 5). При этом гильза 10 регулятора 4 установится так, что полость управления 18 золотником 14, рабочая полость 27 гидроаккумулятора 3 и полость Б подъема силового гидроцилиндра через открытый запорный клапан 21 соединятся со сливом через сливную магистраль 36. Орудие опускается под действием собственного веса до глубины, определяемой опорным колесом. Для установки требуемого подпора в полости Б силового гидроцилиндра 6 рукоятку 12 регулятора 4 устанавливают в положение III зоны регулирования. Гильза 10 при это.м сдвигается влево и перекрывает
слив из канала управления 43 распределителя 5 через золотник 14 в магистраль 35. При этом перепускной клапан 25 распределителя закроется, направляя рабочую жидкость от гидронасоса 2 по магистрали 33 через проточки в корпусе 9 и гильзе 10,
магистраль 40, обратный клапан 41 в полость Б силового гидроцилиндра 6 и одновременно через магистраль 30, обратный клапан 21, проточки в корпусе 9, открытый кран 29, магистраль 28 в рабочую полость
27 гидроаккумулятора 3, а также магистраль 31, проточки в корпусе и гильзе и отверстие 32 в золотнике в полость управления 18 золотником 14. Рабочая жидкость. поступившая в полость управления 18, сдвигает золотник 14, преодолевая сопротивление пружины 20, вслед за гильзой 10. Перемеихение золотника 14 и сжатие пружины 20 (зарядка аккумулятора 3) происходит до тех пор, пока золотник 14 своим отверстием не соединит магистраль 42 канала управления 43 со сливной магистралью 35 (см. фиг. 1). При этом перепускной клапан 25 откроется и гидронасос 2 переключится на режим холостого перепуска. Заданное рукояткой 12 регулятора давления подпора в полости Б силового гидроцилиндра поддерживается автоматически. Если величина давления в полости Б и рабочей полости 27 гидроаккумулятора отличается от заданной, то произойдет перемещение золотника 14 вправо под действием пружины 20 при падении давления в полости управления 18, либо влево под действием давления в полости управления 18. При перемещении золотника 14 вправо (уменьщение давления в рабочей полости 27 гидроаккумулятора, в полости Б силового гидроцилиндра и полости управления 18) магистраль 42, соединяющая канал управления 43 со сливо.м, перекроется золотником 14. Перепускной клапан 25 закроется, направляя рабочую жидкость от гидронасоса 2 в полость Б силового гидроцилиндра, рабочую полость 27 гидроаккумулятора и полость управления 18. При перемещении золотника 14 влево (увеличение давления в полости Б силового гидроцилиндра, гидроаккумуляторе и полости управления 18) полость Б силового гидроцилиндра, рабочая полость 27 гидроаккумулятора и полость управления 18 через проточки и отверстия в регуляторе и соответствующие магистрали соединяются со сливной магистралью 36. В обоих случаях давление подпора в полости Б силового гидроцилиндра, в рабочей полости 27 гидроаккумулятора и связанной с ними полостью управления 18 выравнивается до заданного. Для подъема орудия в транспортное положение гильзу 10 устанавливают рукояткой 12 в положение, показанное на фиг. 3. В этом положении запорный клапан 21 отсоединяет гидроаккумулятор и полость управления 18 от полости Б силового гидроцилиндра, а магистраль 42, соединяющая канал управления 43 перепускным клапаном 25 со сливом, перекрывается от сливной магистрали 35 гильзой 10. Перепускной клапан 25 nprt этом закрывается, и поток масла по магистрали 33 проточки в корпусе и гильзе регулятора, магистраль 40 и обратный клапан 41 поступает в полость Б подъема силового гидроцилиндра 6, а полость опускания А через магистраль 37, проточки в корпусе и гильзе регулятора сообщается со сливом через магистраль 35. В результате пор1пень силового гидроцилиндра 6 переместится влево до упора, а орудие поднимется в транспортное пололчсние. После окончания подьсма рукоятку 12 устанавливают в положение 1 (см. фиг. 2,4) и насос 2 переключается на работу в режиме холостого перепуска. При этом независимо от положения золотника 14 полость Б силового гидроцилиндра отсоединена от сливной магистрали 36 и от рабочей полости 27 гидроаккумулятора заиорным клапаном 21. В результате рабочая жидкость в полости Б силового гидроцилиндра запирается и орудие надежно удерживается в трапспо)тном положении. Предлагаемая система регулирования давления подпора в полости подъема силового гидроцилиндра имеет более высокую чувствительность и стабильность параметров регулирования за счет замены механической связи подвижного элемента гидроаккумулятора с золотником регулятора гидравлической связью раббчей полости гидроаккумулятора с ЗОЛОТН1П ОМ. При силовом и позиционном регулировании гидроаккумулятор 3 отсоединяется от регулятора 4 запорным краном 29. Для силового регулирования золотник 14 через винтовую пару 15 и систему рыча1ов и тяг связывают с датчиком сигналов 7 (см. фиг. 2), который выполнен в виде силоизмерительно пружины. При позиционном регулировании золотник 14 через ту же винтовую пару и систему рычагов и тяг связывают с датчиком сигналов 8. Датчиком в этом случае служит поворотный вал 45. Управление гидросистемой при силовом и позиционном режимах регулирования осуществляют аналогично управлению при высотном регулировании рукояткой 12. Формула изобретения Гидравлическая система управления навесными сельскохозяйственными орудиями, включающая регулятор силового и позиционного регулирования с золотником, подключенным к датчикам и гидроаккумулятор, рабочая полость которого сообщена с полостью подъема силового гидроцилиндра механизма навески сельскохозяйственного орудия, oT.utчающаяся тем, что, с целью повышения чувствительности и стабильности параметров системы путем регулирования сцепно1о веса и автоматического поддержания заданного давления в силовом гидроцилиндре при высотном регулировании, рабочая полость гидроаккумулятора сообщена с замкнутой полостью управления, образуемой подпружи
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлическая система управления навесными сельскохозяйственными орудиями | 1973 |
|
SU441880A1 |
| Гидравлическая система управления навесными орудиями трактора | 1972 |
|
SU441881A1 |
| ГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕСНЫМИ ОРУДИЯМИ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАКТОРА | 1970 |
|
SU280074A1 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1988 |
|
SU1538909A2 |
| Гидравлическая система управления сельскохозяйственными орудиями | 1986 |
|
SU1429959A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1618301A1 |
| Гидросистема управления сельскохозяйственными орудиями | 1988 |
|
SU1643815A1 |
| Гидросистема сельскохозяйственного трактора | 1989 |
|
SU1710869A1 |
| Регулятор гидросистемы управления положением рабочего органа сельскохозяйственной машины | 1989 |
|
SU1701135A1 |
| Регулятор гидросистемы управления сельскохозяйственными орудиями | 1990 |
|
SU1764533A1 |
