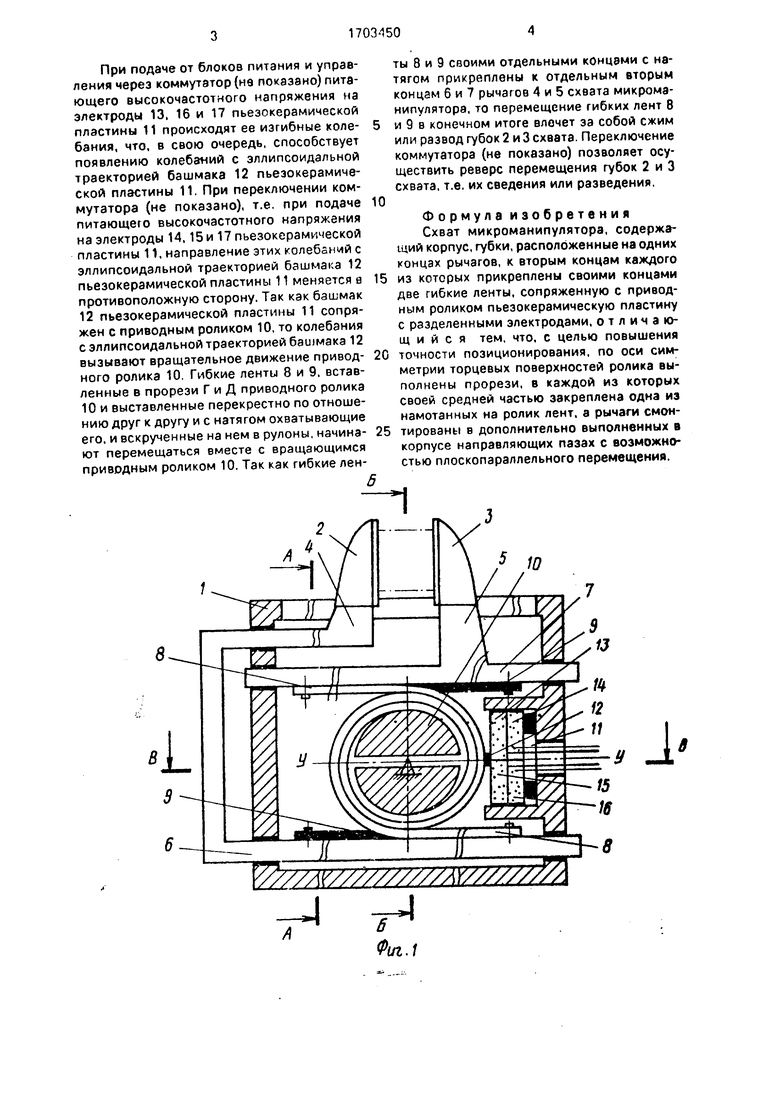
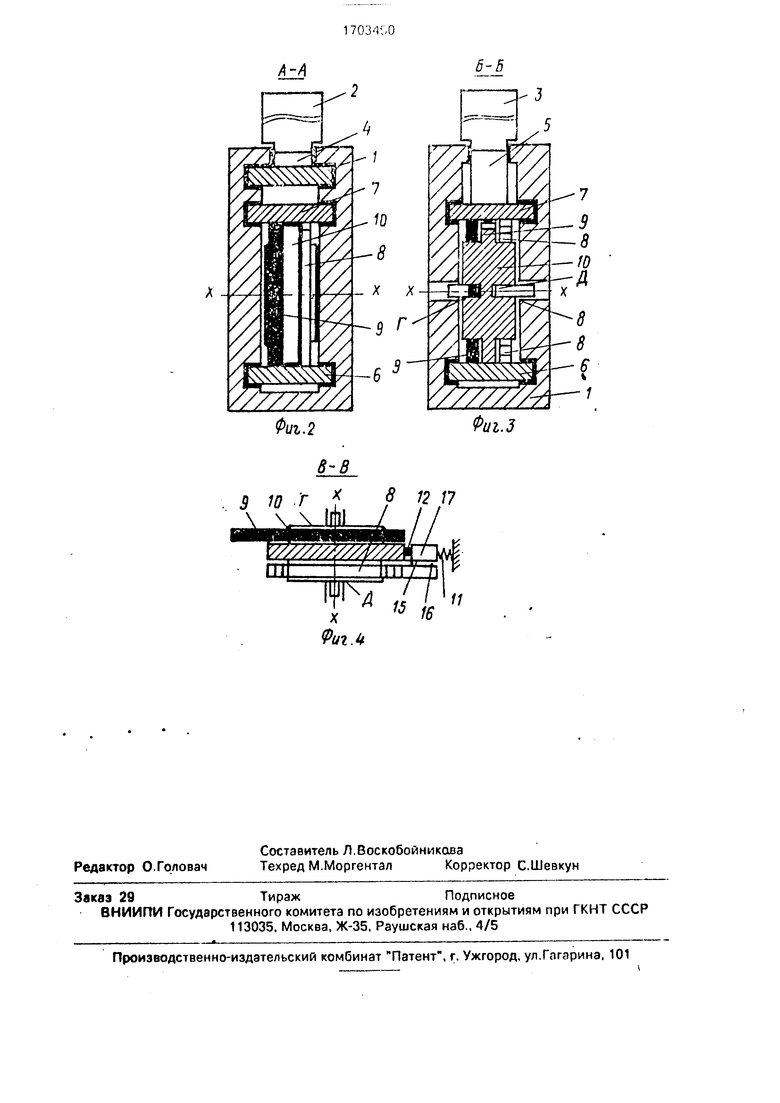
При подаче от блоков питания и управления через коммутатор (не показано) питающего высокочастотного напряжения на электроды 13, 16 и 17 пьезокерамической пластины 11 происходят ее изгибные коле- бания, что, в свою очередь, способствует появлению колебаний с эллипсоидальной траекторией башмака 12 пьеэокерамиче- ской пластины 11. При переключении коммутатора (не показано), т.е. при подаче питающего высокочастотного напряжения на электроды 14,15 и 17 пьезокерамической пластины 11, направление этих колебаний с эллипсоидальной траекторией башмака 12 пьезокерамической пластины 11 меняется в противоположную сторону. Так как башмак 12 пьезокерамической пластины 11 сопряжен с приводным роликом 10, то колебания с эллипсоидальной траекторией башмака 12 вызывают вращательное движение привод- ного ролика 10. Гибкие ленты 8 и 9. вставленные в прорези Г и Д приводного ролика 10 и выставленные перекрестно по отношению друг к другу и с натягом охватывающие его, и вскрученные на нем в рулоны, начина- ют перемещаться вместе с вращающимся приводным роликом 10. Так как гибкие ленты 8 и 9 своими отдельными концами с натягом прикреплены к отдельным вторым концам б и 7 рычагов 4 и 5 схвата микроманипулятора, то перемещение гибких лент 8 и 9 в конечном итоге влечет за собой сжим или развод губок 2 и 3 схвата. Переключение коммутатора (не показано) позволяет осуществить реверс перемещения губок 2 и 3 схвата, т.е. их сведения или разведения.
Формула изобретения Схват микроманипулятора, содержа- щий корпус, губки, расположенные на одних концах рычагов, к вторым концам каждого из которых прикреплены своими концами две гибкие ленты, сопряженную с приводным роликом пьезокерамическую пластину с разделенными электродами, отличающийся тем, что, с целью повышения точности позиционирования, по оси симметрии торцевых поверхностей ролика выполнены прорези, в каждой из которых своей средней частью закреплена одна из намотанных на ролик лент, а рычаги смонтированы в дополнительно выполненных в корпусе направляющих пазах с возможностью плоскопараллельного перемещения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Опора прямолинейного перемещения | 1981 |
|
SU949236A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
| Вибродвигатель | 1979 |
|
SU819862A1 |
| Насос перистальтического типа | 1980 |
|
SU954608A1 |
| Виброконвейер | 1981 |
|
SU998250A1 |
в
А-А
Фиг.2
В-Б
f
Фиг.З
П /7
