(54) СХВАТ МИКРОМАНИПУЛЯТОРА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Схват микроманипулятора | 1989 |
|
SU1703450A1 |
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
| Схват манипулятора | 1986 |
|
SU1360981A1 |
| Очувствленный схват манипулятора | 1986 |
|
SU1425082A1 |
| Схват манипулятора | 1983 |
|
SU1096098A1 |
| Очувствленный схват робота | 1985 |
|
SU1373565A1 |
1
Изобретение относится к робототехнике и может быть применено в очувствленных схватах роботов-манипуляторов.
Известны микроманипуляторы, приводы которых выполнены в виде снабженных электродами пьезопластин 1.
Известны также микроманипуляторы, схваты которых содержат корпус, губки, закрепленные на концах рычагов, привод губок, сенсорные датчики и блоки управления и питания 2.
Недостатками известных устройств являются сложность конструкции и недостаточная чувствительность схвата.
Цель изобретения - повышение чувствительности и упрощение конструкции схвата.
Поставленная цель достигается тем, что не менее чем один из электродов пьезокерамической пластины разделен на части, соединенные электрически в шахматном порядке между собой, а через коммутатор - с блоками питания и управления, при этом вторые концы рычагов контактируют с пьезокерамической пластиной, а сенсорные датчики выполнены в виде частотного детектора и масштабного блока, г:одключенных последовательно через коммутатор к электродам пьезокерамической пластины, причем масштабный блок соединен со входом блока управления, а выходы блока управления соединены соответственно со входом управления коммутатора и со входом управления блока питания.
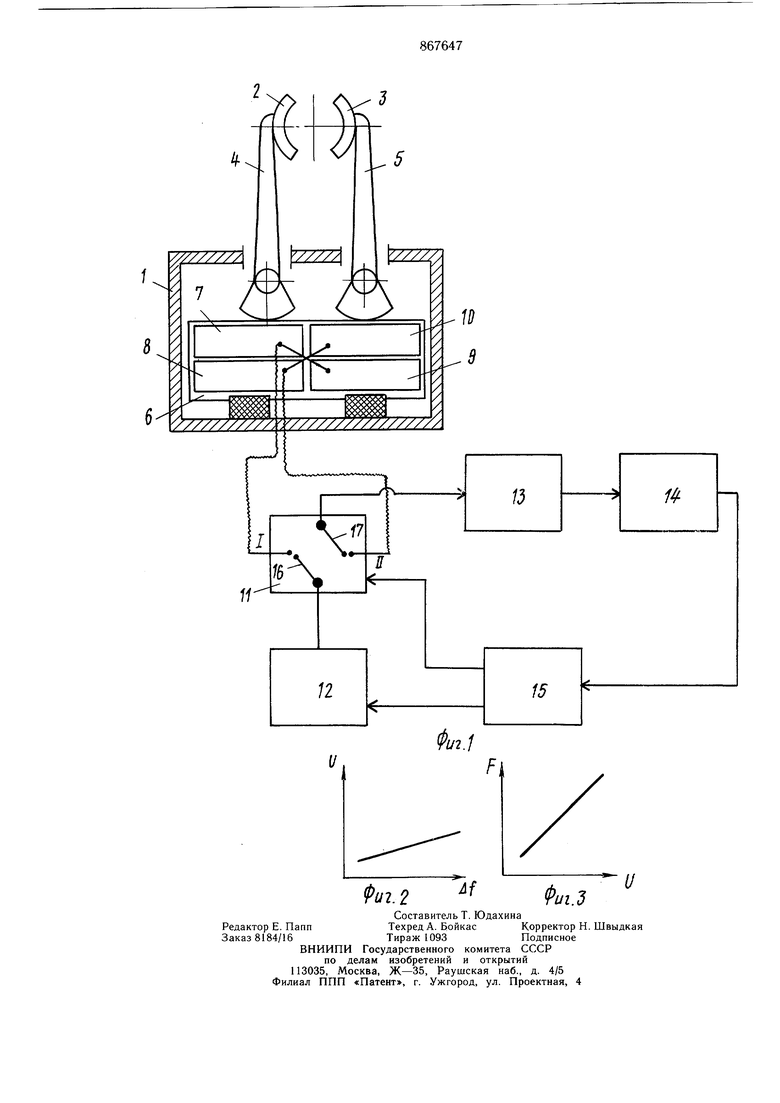
На фиг. 1 схематически изображено конструктивное -решение устройства; на фиг. 2 дан график преобразования частотным детектором изменения резонансной частоты колебания пьезокерамической пластинки
to в напряжение; на фиг. 3 - график изменения величины силы сжатия губок, соответствующей изменению этого напряжения.
Схват микроманипулятора содержит корпус 1, губки схвата 2 и 3 прикрепленные
15 к концам рычагов 4 и 5 соответственно, к другим концам которых прижата пьезокерамическая пластинка 6, один электрод которой разделен на четыре симметричные части 7-10, которые шахматным порядком электрически соединены между собой в две
20 пары 7, 9 и 8, 10, каждая пара через коммутатор II соединена с блоком 12 питания. Сенсорный датчик образован из последовательно через коммутатор 11 подключенных
к электродам 7-10 пьезокерамической пластинки 6 частотного детектора 13 и масштабного блока 14, последний из которых соединен с входом блока 15 управления, причем один выход блока 15 управления, соединен с входом управления коммутатора 11, а другой с входом управления блока 12 питания. Коммутатор 11 содержит переключатель 16, соединяющий блок питания с электродами пластинки 6, и переключатель 17, соединяющий электроды пластинки 6 с частотным детектором 13, масштабным блоком 14 и блоком управления схватом.
Схват работает следующим образом.
При включении блока 12 питания и переключателя 16 в положение, например, I, питающее высокочастотное напряжение подается в пару электродов 7, 9 и на электрод с другой стороны пластинки 6 (не показан). Это напряжение вызывает изгибные колебания пластинки 6, что, в свою очередь, способствует появлению в некоторых точках пластинки, колебаний с эллипсоидальной траекторией и с разными направлениями смещения. В зависимости от соотношения пластинки 6 от частоты питающего напряжения, места этих точек меняются, а при переключении коммутатора 11 в положение II, т. е. при подаче питающего напряжения на электроды 8 и 10, направление этих колебаний меняется в противоположную сторону, что позволяет осуществить реверс перемещения рычагов 4, 5 и губок 2, 3. К концам рычагов 4 и 5 прижата пластинка 6 именно в тех местах, в которых появляются колебания с эллипсоидальной траекторией, но направление этих траекторий направлено в противоположную сторону, так как каждая губка должна перемещаться в противоположном направлении относительно одна другой.
При включении переключателя 16 в положение I, переключатель 17 переключается в положение III и соединяет электроды 8 и 10 с частотным детектором 13, масштабным блоком 14 и с входом блока 15 управления. Изгибные колебания пластинки вследствии обратного пьезоэффекта вызывают появление на электродах 8 и 10 переменного напряжения, частота которых соответствует частоте изгибных колебаний 6. При перемещении рычагов 4 и 5 без исследуемого объекта (не показан), частота колебаний пластин и 6 имеет определенную величину, а послэ прикосновения к этому объекту
губок 3 и 2 появляется некоторый момент сопротивления перемещению, что вызывает изменение частоты колебания пластинки 6. Это изменение фиксируется частотным детектором 13, который преобразует это изменение в соответствующее напряжение (фиг. 2), и в дальнейшем дешифруется масштабным блоком, т. е. преобразуется в показания силы сжатия губками по заданной характеристике соотношений (например, фиг. 3), далее сигнал подается в блок управления 15, который следит и управляет работой схвата по заданной программе.
При переключении переключателя 16 в положение II, то есть при реверсировании привода губок, переключатель 17 переключается в положение 1 и происходит аналогичный процесс работы.
Формула изобретения
Схват микроманипулятора, содержащий корпус, губки, закрепленные на концах рычагов, привод губок, выполненный, например, в виде пьезокерамической пластины с
электродами, сенсорные датчики, коммутатор, а также блоки управления и питания, отличающееся тем, что с целью повышения чувствительности и упрощения конструкции не менее чем один из электродов разделен на части, соединенные электрически в шахматном порядке между собой, а через коммутатор - с блоками питания и управления, при этом вторые концы рычагов контактируют с пьезокерамической пластиной, а сенсорные датчики выполнены в виде
частотного детектора и масштабного блока, подключенных последовательно через коммутатор к электродам пьезокерамической пластины, причем масштабный блок соединен со входом блока управления, а выходы блока управления соединены соответственно со входом управления коммутатора и со входом управления блока питания.
Источники информации, принятые во внимание при экспертизе
