(Л
:л
со х
|
лебания пластины 10, что приводит к перемещению рычагов 4 и 5, на которых расположены губки 2 и 3, образующие схват. Для синхроииза1ц-1И их перемещений на протирзоположиых концах рычагов 4 и 5 закреплены гибкие ленты, перекрестно пхпатываюпще эти концы
piiiqaroH. Поэтому вращательное движение конца одного из рычагов, вызываемое колебаниями пластины 10, одновременно заставляет вращаться соответст- вуюиц-тй конец второго рычага, что устраняет рассогласование их уг ловых перемещений. 2 ил.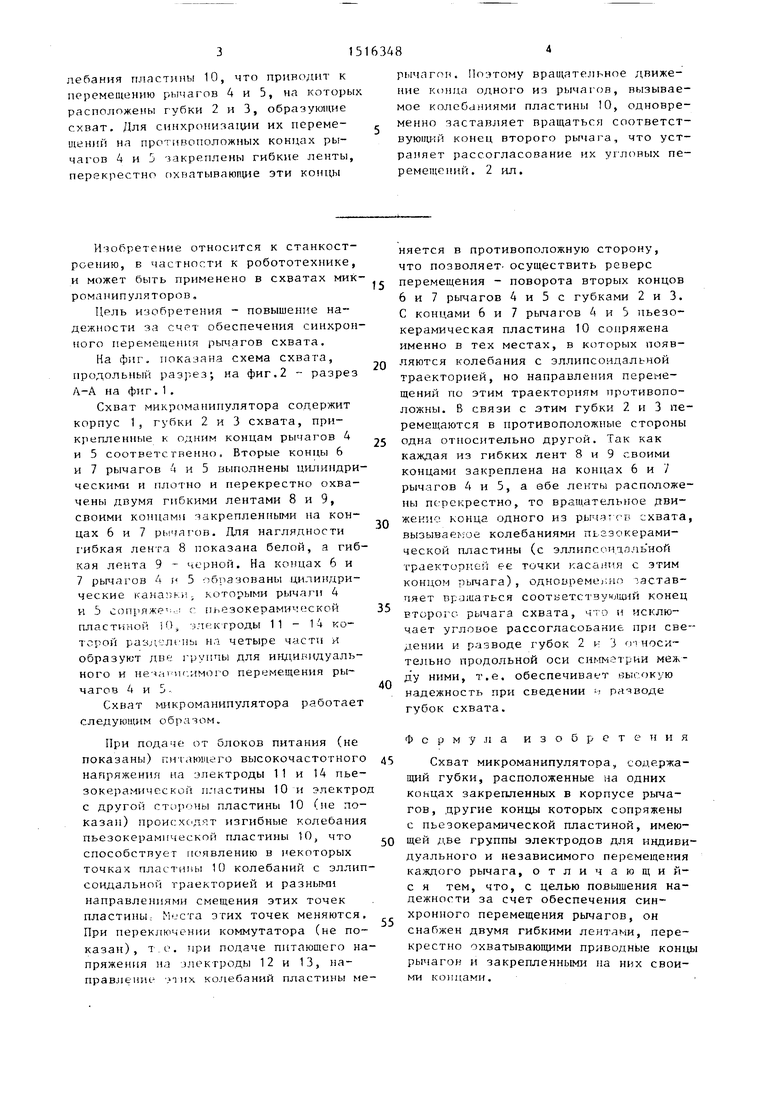
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1989 |
|
SU1703450A1 |
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1988 |
|
SU1602735A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| Схват | 1986 |
|
SU1440703A1 |
| Схват манипулятора | 1986 |
|
SU1360981A1 |
| Захватное устройство | 1985 |
|
SU1283091A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
Изобретение относится к станкостроению, в частности к робототехнике, и может быть применено в схватах микроманипуляторов. Цель изобретения - повышение надежности за счет обеспечения синхронного перемещения рычагов схвата. При подаче высокочастотного напряжения на электроды 11 и 14 пьезокерамической пластины 10 и на электрод с другой стороны этой пластины происходят изгибные колебания пластины 10, что приводит к перемещению рычагов 4 и 5, на которых расположены губки 2 и 3, образующие схват. Для синхронизации их перемещений на противоположных концах рычагов 4 и 5 закреплены гибкие ленты, перекрестно охватывающие эти концы рычагов. Поэтому вращательное движение конца одного из рычагов, вызываемое колебаниями пластины 10, одновременно заставляет вращаться соответствующий конец второго рычага, что устраняет рассогласование их угловых перемещений. 2 ил.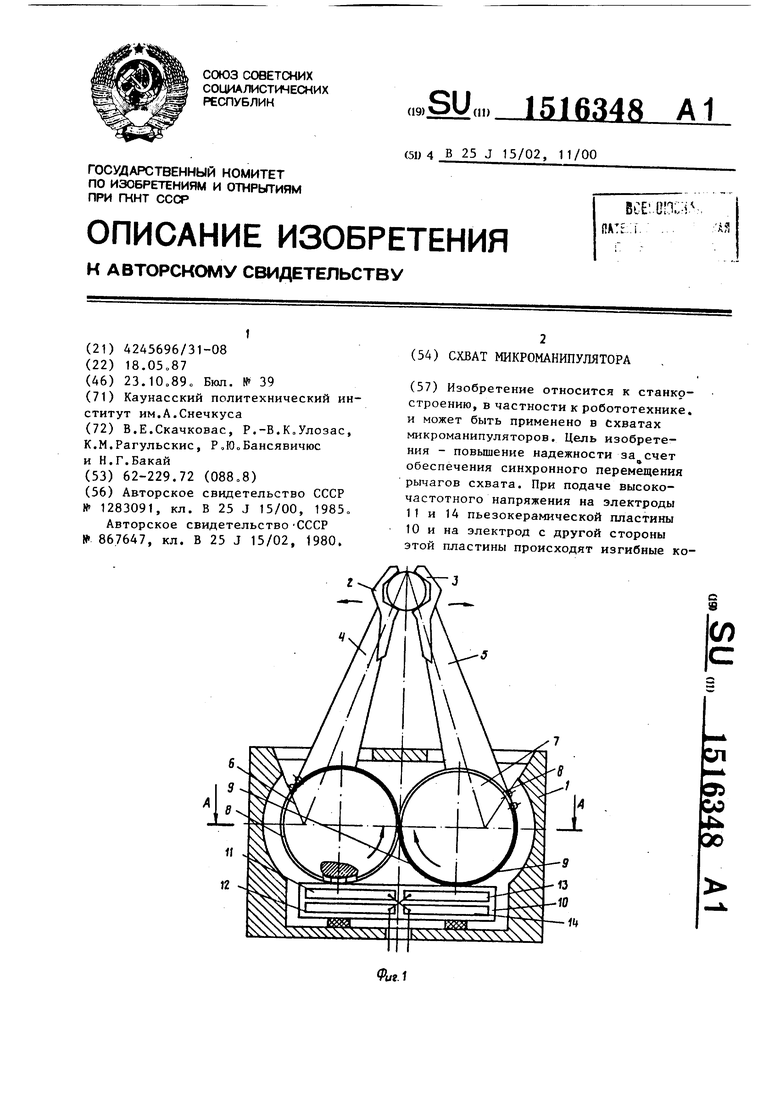
Изобретение относится к станкостроению, в частности к робототехнике, и может быть применено в схватах микроманипуляторов ,
Цель изобретения - повышение надежности за счет обеспечения синхронного перемегдения рычагов охвата.
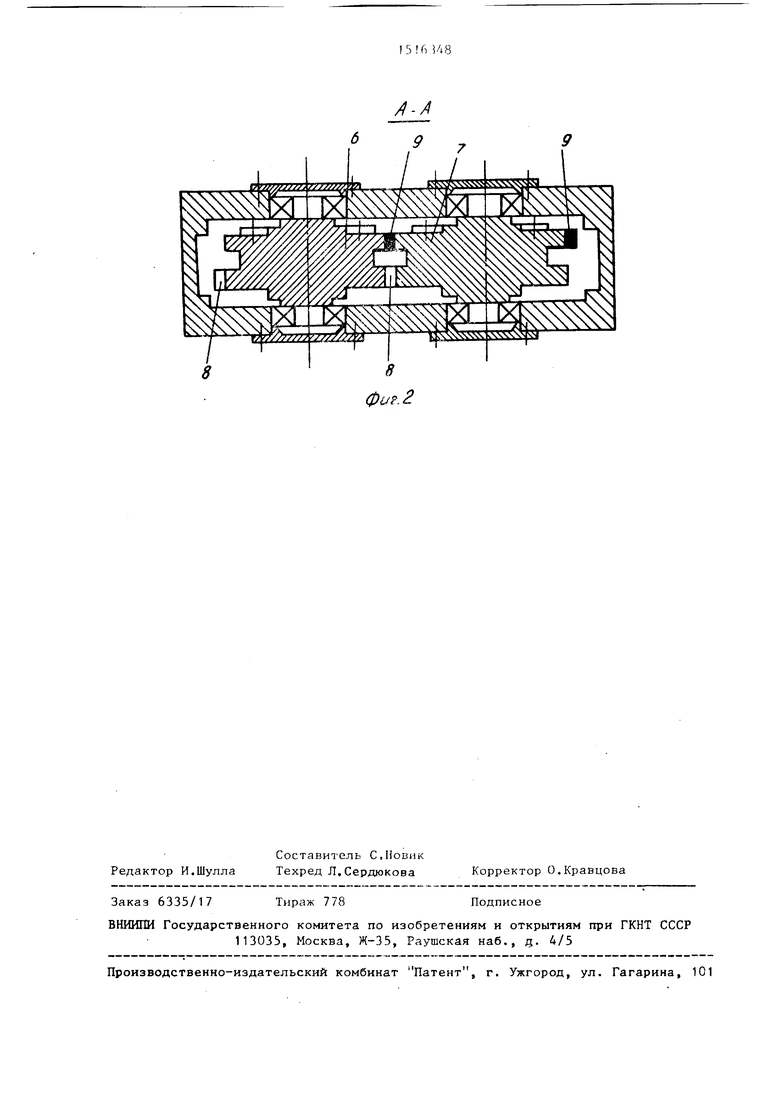
На фиг. показана схема схвата, продольный разрез; на фиг.2 разрез Л-А на фиг.1.
Схват микроманипулятора содержит корпус 1, губки 2 и 3 схвата, прикрепленные к одним концам рычагов 4 и 5 соответсгвенно Вторые концы 6 и 7 рычагов 4 и 5 выполнены цилиндрическими и плотно и перекрестно охвачены двумя гибкими лентами 8 и 9, своими концами закрепленными на концах 6 и 7 рычагов. Для наглядности 1 ибкая лента 8 показана белой, а гибкая лента 9 - черной. На концах 6 и 7 рычагов 4 и 5 образованы цилиндрические кана:5Кг.. которыми рычаги 4 и 5 ссзпряже -;.: г 1ьезокерамической пласт1 ной iOj -jjiRK гроды 11 - 14 которой раз; ул1 ны н,1 четыре части и образуют две группы для ищ1,ивидуаль- ного и неза1 Ч :имого перемещения рычагов 4 и 5Схват м} кроманипулятора работает следующим образом.
При подаче от блоков питания (не показаны) г:ит,1Ю1цего высокочастотного напряжения на электроды 11 и 14 пье- зокерамической п.частины Юн электро с другой CTopciHbi пластины 10 (не по- казап) происхс дят изгибные колебания пьезокерамической пластины 10 что способствует появлению в некоторых точках пласти)ы 10 колебаний с эллипсоидальной траекторией и разны а1 направлениями смещения этих точек пластиныс ЬJCтa этих точек меняются. При переключении коммутатора (не показан), т.е. при подаче питающего напряжения на электроды 12 и 13, направление ЛИХ колебаний пластины ме
0
5
0
5
0
5
0
5
няется в противоположную сторону, что позволяет- осуществить реверс перемещения - поворота вторых концов 6 и 7 рычагов 4 и 5 с губками 2 и 3. С концами 6 и 7 рычагов 4 и 5 пьезо- керамическая пластина 10 сопряжена именно в тех местах, в которых появляются колебания с эллипсоидальной траекторией, но направления перемещений по этим траекториям противоположны. В связи с этим губки 2 и 3 перемещаются в противоположные стороны одна относительно другой. Так как каждая из гибких лент 8 и 9 своими концами закреплена на концах 6 и 7 рычагов 4 и 5, а абе ленты расположены перекрестно, то вращательное дви- жекие конца одного из рычат го схвата, вызывae юe колебаниями пьззокерами- ческой пластины (с эллипсот1дл,чь ной траекторией ее точки касания с этим концом рычага) , одноБреме ;но тастав- цяет прашагься соотнетствунлдпй конец второго рычага схвата, что и исключает угловое рассогласоБание при сведении и разводе губок 2 у. 3 ш носи- тельно продольной оси CHf-rNiarpHH f3.y ними, т.е. обеспечивает выс.сжую надежность при сведении и разводе губок схвата.
Формула и 3 о б р е т е TI и я
Схват микроманипулятора,, содержащий губки, расположенные на одних концах закрепленных в корпусе рычагов, другие концы которых сопряжены с пьеэокерамической пластиной, имеющей две группы электродов для индивидуального и независимого перемещения каждого рычага, отличающий- с я тем, что, с целью повышения надежности за счет обеспечения синхронного перемещения рычагов, он снабжен двумя гибкими лентами, перекрестно охватывающими приводные кон1да рьпагон и закрепленными па них своими к о 15 нами.
| Захватное устройство | 1985 |
|
SU1283091A1 |
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
