Изобретеиие относится к станкостроению, в частности к робототехнике, и может быть ьряменено в очувствленных схватах микроМЙ 1И.1|уЛЯТОрОВ.
Цель изобретения - уменьшение габаритов схвата.
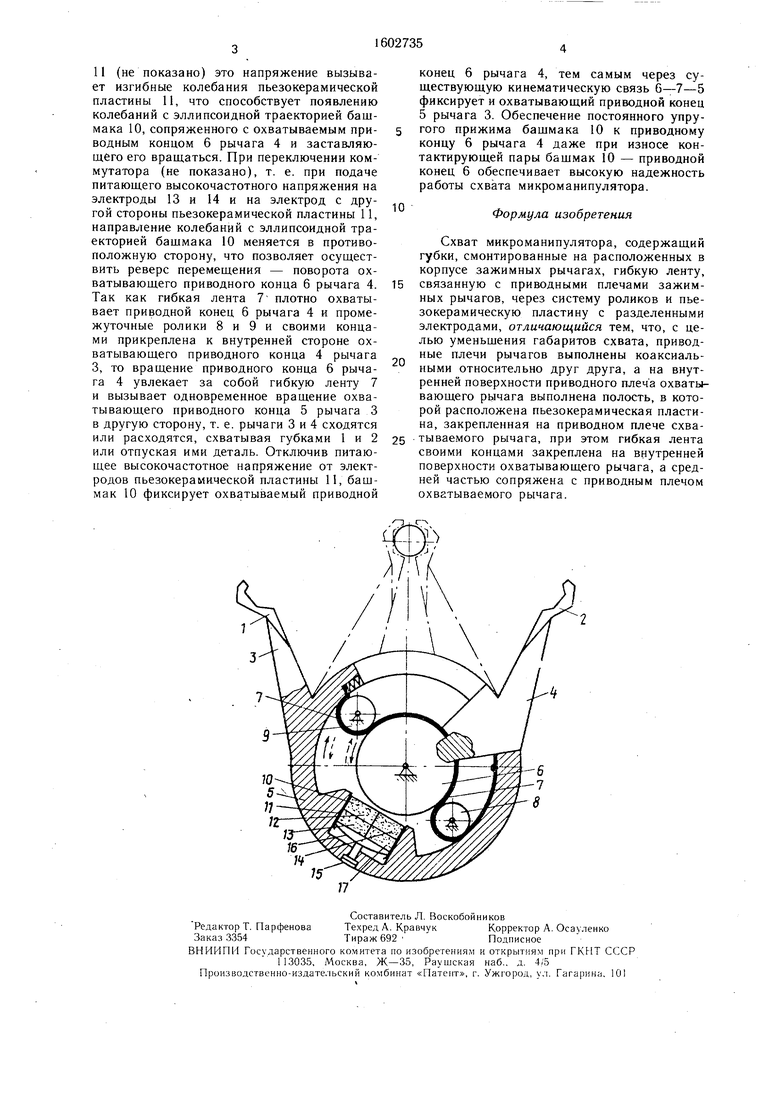
На чертеже изображен предлагаемый схват микроманипулятора.
Схаат .микроу.анипулятора содержит кор- nvc (;ie показап), губки 1 и 2 схвата, прикрепленные к одним концам рычагов 3 и 4 соответственно. Вторые (г риводные) концы 5 и 6 рычагов 3 и 4 установлены на одной геометрической оси и выполнены входящими дру г А друга, т. е. расположены коаксиально - внутри охаатыааю- 1П,его прг водного конца 5 рычага 3 установлен oxtirrrtjfiae ift фиьодной KOHei.i. и оычага 4. Гибкая лента 7 своими концами прикреплена к знутренней стороне охватывающего приводного конца 5 рычага 3, причем один конец гибкой ленты 7 прикреплен жссткс;, э втором С - подпру-хи- нен. Гибкая лента 7 через ;помеж 1Ч г 1П)е
: показано). Пьезо- 1 установлена в по- риводного конца 5
ролики 8 и 9 охватывает приводной конец 6 pbr-tara 4. с которым через 6aHJN aK 0 сопряжена пьезокерамическая пластина 11, электроды которой с одной стороны разделены на четыре части 12- -15. а с другой стороны не разделены. Электроды ньезоке- .и ecкoк пласт1;ны 1 I ;);;ектрн еск . коммутатор соед1М1епь с б.чоками питания и управления cxBaroNj ; керамическая плас Пк:, .ПОСТ;-; охватывают; 1C го
рычага 3 с возмож ;оегьк) радиального перемещения и подпруж;П;ена пружиной 16. Регулирование пьезокерамической пластины 11 при полилпи Г|рухчины 16 осуществляется регх ||:ровочным винтом 17.
лшкромамин-,л -Р - работаег следу ющи м образом.
При подаче от блоков нитан1 я и управ- .пепия -орез коммутак р iinrjiomcf o высоко- часто ;;; : ;. напряжс : ; ч: , 5. 1ек родов
на : . .;i с .. сг ..:ь1 нласт1 11Ы
лэсД
05
Ю
сд
11 (не показано) это напряжение вызывает изгибные колебания пьезокерамической пластины 11, что способствует появлению колебаний с эллипсоидной траекторией башмака 10, сопряженного с охватываемым приводным концом 6 рычага 4 и заставляющего его вращаться. При переключении коммутатора (не показано), т. е. при подаче питающего высокочастотного напряжения на электроды 13 и 14 и на электрод с другой стороны пьезокерамической пластины 11, направление колебаний с эллипсоидной траекторией бащмака 10 меняется в противоположную сторону, что позволяет осуществить реверс перемещения - поворота охватывающего приводного конца 6 рычага 4. Так как гибкая лента 7 плотно охватывает приводной конец 6 рычага 4 и промежуточные ролики 8 и 9 и своими концами прикреплена к внутренней стороне охватывающего приводного конца 4 рычага 3, то вращение приводного конца 6 рычага 4 увлекает за собой гибкую ленту 7 и вызывает одновременное вращение охватывающего приводного конца 5 рычага 3 в другую сторону, т. е. рычаги 3 и 4 сходятся или расходятся, схватывая губками 1 и 2 или отпуская ими деталь. Отключив питающее высокочастотное напряжение от электродов пьезокерамической пластины 11, бащ- мак 10 фиксирует охватываемый приводной
конец б рычага 4, тем самым через существующую кинематическую связь 6-7-5 фиксирует и охватывающий приводной конец 5 рычага 3. Обеспечение постоянного упругого прижима бащмака 10 к приводному концу 6 рычага 4 даже при износе контактирующей пары бащмак 10 - приводной конец 6 обеспечивает высокую надежность работы схвата микроманипулятора.
Формула изобретения
Схват микроманипулятора, содержащий губки, смонтированные на расположенных в корпусе зажимных рычагах, гибкую ленту, связанную с приводными плечами зажимных рычагов, через систему роликов и пье- зокерамическую пластину с разделенными электродами, отличающийся тем, что, с целью уменьщения габаритов схвата, приводные плечи рычагов выполнены коаксиальными относительно друг друга, а на внутренней поверхности приводного плеча охватывающего рычага выполнена полость, в которой расположена пьезокерамическая пластина, закрепленная на приводном плече схватываемого рычага, при этом гибкая лента своими концами закреплена на внутренней поверхности охватывающего рычага, а средней частью сопряжена с приводным плечом охватываемого рычага.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| Схват микроманипулятора | 1989 |
|
SU1703450A1 |
| Схват микроманипулятора | 1980 |
|
SU867647A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |
| Микроманипулятор | 1980 |
|
SU867645A1 |
| Очувствленный схват манипулятора | 1985 |
|
SU1309450A1 |
| Опора прямолинейного перемещения | 1981 |
|
SU949236A1 |
| Схват микроманипулятора | 1981 |
|
SU1009756A1 |
| МИКРОСХВАТ С СИЛОВЫМ ОЧУВСТВЛЕНИЕМ | 2004 |
|
RU2261170C1 |
| Схват | 1986 |
|
SU1440703A1 |
Изобретение относится к станкостроению, в частности к робототехнике, и может быть применено в очувствленных схватах микроманипулятора. Цель изобретения - уменьшение габаритов схвата. Схват микроманипулятора содержит губки, расположенные на одних концах закрепленных в корпусе рычагов, гибкую ленту, сопряженную с приводными концами рычагов и частично их охватывающую, и пьезокерамическую пластину с разделенными электродами. Приводные концы рычагов установлены на одной геометрической оси и выполнены коаксиальными, т.е. входящими друг в друга. Гибкая лента своими концами прикреплена к внутренней стороне охватывающего приводного конца рычага и через введенные промежуточные ролики сопряжена с охватываемым приводным концом рычага, с которым сопряжена пьезокерамическая пластина, установленная внутри охватывающего приводного конца рычага. 1 ил.
| Схват микроманипулятора | 1987 |
|
SU1516348A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
