соответствующие блоки установки масштабов подключены к входам блока се- лектирования аналоговых сигналов, выход которого через блок скользящего интегрального усреднения подключен к второму входу сумматора, выход сумматора подключен к входу пропорционально-интегрально-дифференциального регулятора привода поворота роторной стрелы.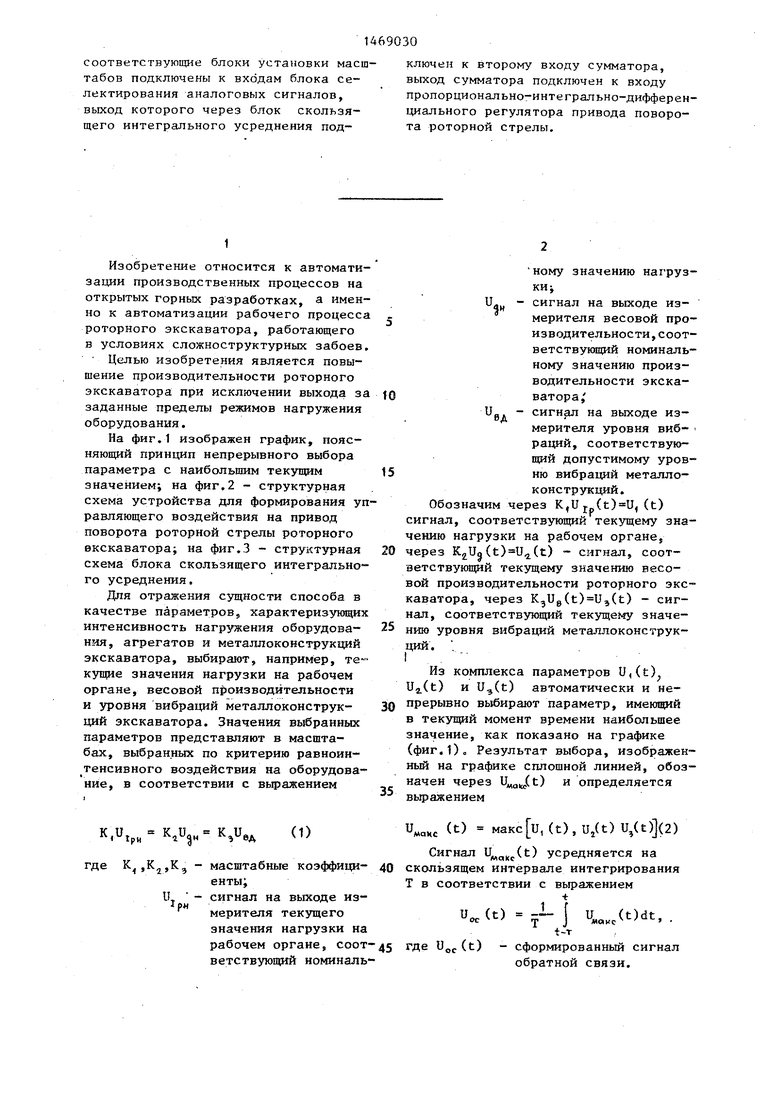

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматизированного управления рабочим процессом роторного экскаватора и система управления для его осуществления | 1985 |
|
SU1686078A1 |
| Автоматизированная система управления рабочим процессом роторного экскаватора | 1985 |
|
SU1703797A1 |
| Устройство для автоматизированного контроля силового режима металлоконструкций машин роторных комплексов | 1984 |
|
SU1209772A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1984 |
|
SU1180461A1 |
| Система автоматизированного управления роторным экскаватором | 1983 |
|
SU1164374A1 |
| Система автоматизированного управления роторным экскаватором | 1985 |
|
SU1266942A2 |
| Устройство для контроля и учета работы добычного роторного экскаватора | 1983 |
|
SU1145089A1 |
| Устройство для автоматического управления роторным экскаватором | 1980 |
|
SU876867A1 |
| Устройство для контроля и управления режимом работы роторного комплекса | 1986 |
|
SU1421837A2 |
| Устройство для автоматизированного контроля силового режима металлоконструкций оборудования роторных комплексов | 1984 |
|
SU1159991A1 |
1 .Способ формирования управляюще-. го воздействия на привод поворота роторной стрелы роторного экскаватора, включанлций задание номинального значения параметров режима работы экскаватора, формирование сигнала обратной связи и сравнение его с заданным номинальным значением параметров режима работы экскаватора, отличающийся тем, что, с целью по-, вышения производительности роторного экскаватора при исключении выхода за заданные пределы режимов нагружения оборудования, измеряют параметры, характеризунлцие интенсивность нагружения оборудования, агрегатов и металлоконструкций экскаватора, значен уг измеренных параметров представляют в масштабах, выбранных по критерию рав- ноинтенсивного воздействия на оборудование, агрегаты и металлоконструкции экскаватора, непрерывно из полу- .ченных сигналов выбирают максимальный и усредняя его на скользящем интервале интегрирования, получают сигнал обратной связи, вычитают его значение из номинального значения параметров режима работы экскаватора, полученный разностный сигнал преобразуют в соответствии с пропорциональ- но-интегрально-дифференциальным законом и используют полученный сигнал в качестве управлякмцего воздействия на привод поворота роторной стрелы роторного экскаватора. 2. Устройство для формирования уп- равлянщего воздействия на привод поворота роторной стрелы роторного экскаватора, содержащее измеритель текущего значения нагрузки на рабочем органе и задатчик номинального значения параметров режима работы экскаватора, выход которого подключен к первому входу сумматора, отличающееся тем, что оно снабжено измерителями текущих значений уровня вибраций металлоконструкций и весовой производительности, тремя блоками установки масштабов, блоком селектирования аналоговых сигналов, блоком скользящего интегрального усреднения и пропордионально- интегрально-дифференциальным регулятором привода поворота роторной стрелы, выходы измерителей текущих значений нагрузки на рабочем органе, уровня вибраций металлоконструкций и весовой производительности через с 5 (Л . 05 ;О О 00
1
Изобретение относится к автомати- зации производственных процессов на открытых горных разработках, а именно к автоматизации рабочего процесса роторного экскаватора, работающего в условиях сложноструктурных забоев, Цепью изобретения является повышение производительности роторного экскаватора при исключении выхода за заданные пределы режимов нагружения оборудования.
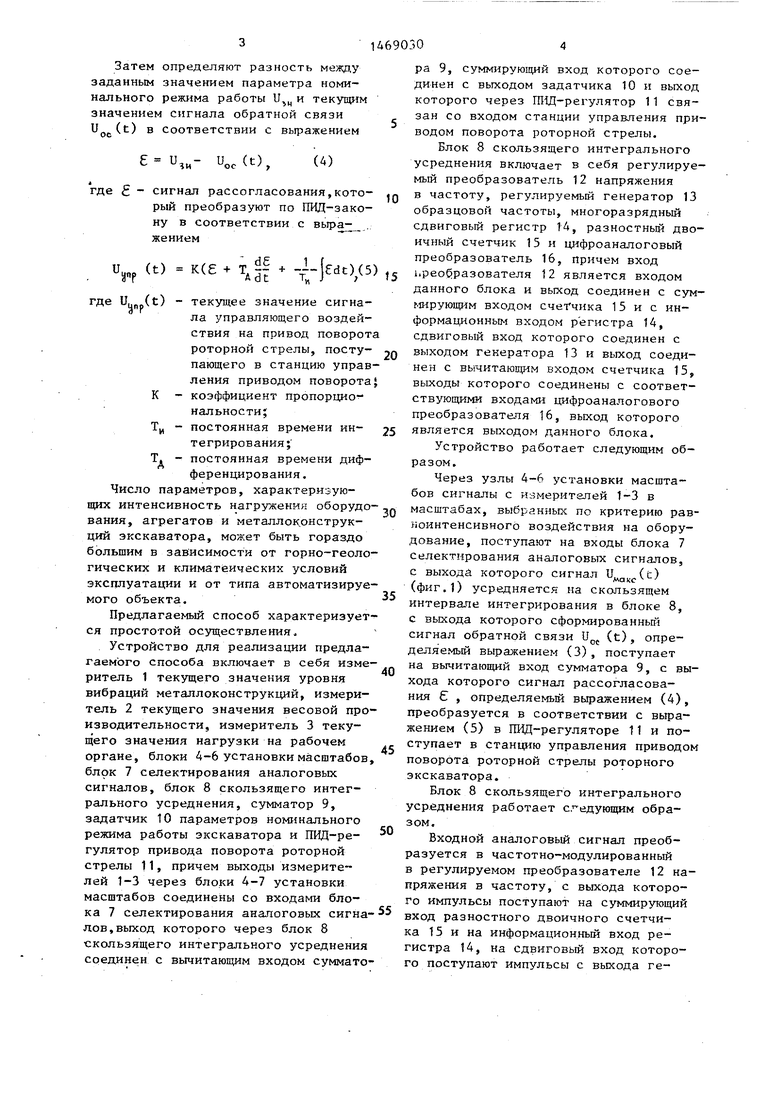
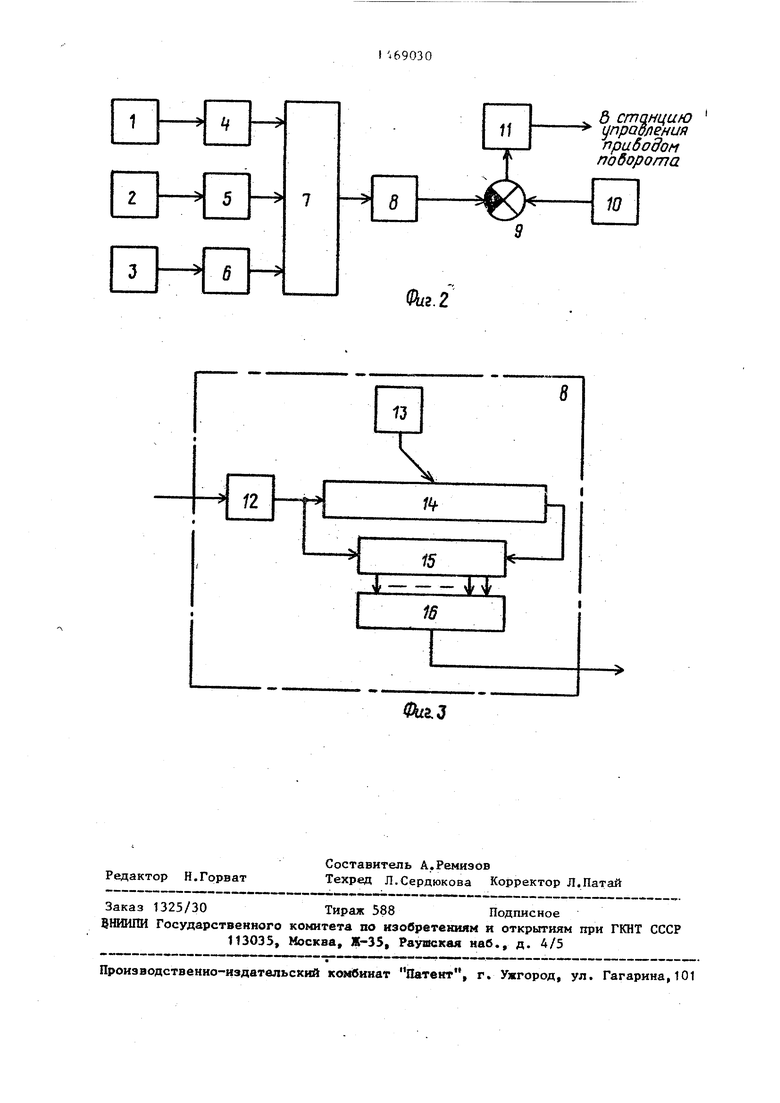
На фиг.1 изображен график, поясняющий принцип непрерывного выбора параметра с наибольщим текущим значением; на фиг.2 - структурная схема устройства для формирования управляющего воздействия на привод поворота роторной стрелы роторного экскаватора на фиг.З - структзфная схема блока скользящего интегрального усреднения.
Для отражения сущности способа в качестве параметров, характеризунщих интенсивность нагружения оборудования, агрегатов и металлоконструкций экскаватора, выбирают, например, текущие значения нагрузки на рабочем органе, весовой производительности и уройня вибраций металлоконструкций экскаватора. Значения выбранных параметров представляют в масштабах, выбранных по критерию равноин- тенсивного воздействия на оборудование, в соответствии с вьфажением
ному значению нагрузки j
U- - сигнал на выходе из- 5мерителя весовой производительности, соответствующий номинальному значению производительности экска- fOватора,
Up - сигнал на выходе измерителя уровня вибраций, соответствующий допустимому уровt5ню вибраций металлоконструкций.
Обозначим через K,Uj.-{t)U, (t) сигнал, соответствующий текущему значению нагрузки на рабочем органе, через TS.((t) сигнал, соответствующий текущему значению весовой производительности роторного экскаватора, через K,Ue(t)U,(t) - сигнал, соответствующий текущему значению уровня вибраций металлоконструкций. ,
Из комплекса параметров U,(t)., }(t) и U(t) автоматически и не- 3Q прерывно выбирают параметр, имеющий в текущий момент времени наибольшее значение, как показано на графике (фиг.1)о Результат выбора, изображенный на графике сплощной линией, обозначен через Hwajlt) и определяется выражением
(1) (t) , (t),Ui(t)U(t)(2)
Сигнал ) усредняется на где K,K,j,K, - масштабные коэффици- 40 скользящем интервале интегрирования енты;Т в соответствии с выражением
IL - сигнал на выходе из--«
Pw t Г
Мерителя текущегоU (t) --- 1 IT (t)dt,
значения нагрузки
рабочем органе, соот-дз где (t) - сформированный сигнал
20
25
35
K.Uj « 1ри
к,
K,UeA
ветствующий номинальобратной связи.
Затем определяют разность между заданным значением параметра номинального режима работы U, и текущим значением сигнала обратной связи
в Соответствии с выражением
oc(t)
и.ци„. (t)
(4)
с - сигнал рассогласования,кото- ,-,
рый преобразуют по ПИД-зако- ну в соответствии с выражением
(t) К(5 . ijf . -l-jedt),(5)
где (t)
текущее значение сигнала управляющего воздействия на привод поворот роторной стрелы, поступающего в станцию управления приводом поворота К - коэффициент пропорциональности;
Т, - постоянная времени интегрирования;
Тд - постоянная времени дифференцирования .
Число параметров, характеризующих интенсивность нагружения оборудования, агрегатов и металлоконструкций экскаватора, может быть гораздо большим в зависимости от горно-геологических и климатеических условий эксплуатации и от типа автоматизируемого объекта.
Предлагаемый способ характеризуется простотой осуществления.
Устройство для реализации предлагаемого способа включает в себя измеритель 1 текущего значения уровня вибраций металлоконструкций, измеритель 2 текущего значения весовой производительности, измеритель 3 текущего значения нагрузки на рабочем органе, блоки 4-6 установки масштабов блок 7 селектирования аналоговых сигналов, блок 8 скользящего интегрального усреднения, сумматор 9, задатчик 10 параметров номинального режима работы экскаватора и ПИД-ре- гулятор привода поворота роторной стрелы 11, причем выходы измерителей 1-3 через блоки 4-7 установки масщтабов соединены со входами блока 7 селектирования аналоговых сигналов,выход которого через блок 8 скользящего интегрального усреднения соединен с вычитающим входом суммато
,-,
15
0
5
0
5
0
5
0
ра 9, суммирую1дий вход которого соединен с выходом задатчика 10 и выход которого через ШЩ-регулятор 11 связан со входом станции управления приводом поворота роторной стрелы.
Блок 8 скользящего интегрального усреднения включает в себя регулируемый преобразователь 12 напряжения в частоту, регулируемый генератор 13 образцовой частоты, многоразрядный сдвиговый регистр 14, разностный двоичный счетчик 15 и цифроаналоговый преобразователь 16, причем вход ьрео разователя 12 является входом данного блока и выход соединен с суммирующим входом счеГчика 15 и с информационным входом регистра 14, сдвиговый вход которого соединен с выходом генератора 13 и выход соединен с вычитающим входом счетчика 15, выходы которого соединены с соответствующими входами цифроаналогового преобразователя 16, выход которого является выходом данного блока.
Устройство работает следующим образом.
Через узлы 4-6 установки масштабов сигналы с измерителей 1-3 в масштабах, выбранных по критерию рав- ноинтенсивного воздействия на оборудование, поступают на входы блока 7 селектнрования аналоговых сигналов, С выхода которого сигнал U. (с)
/ - . мая:с
(фиг,) усредняется на скользящем интервале интегрирования в блоке 8, с выхода которого сформированный сигнал обратной связи U (t), определяемый выражением (3), поступает на вычитающий вход сумматора 9, с выхода которого сигнал рассогласования , определяемый вьфажением (4), преобразуется в соответствии с выражением (5) в ПИД-регуляторе 11 и поступает в станцию управления приводом поворота роторной стрелы роторного экскаватора.
Блок 8 скользящего интегрального усреднения работает следующим образом.
Входной аналоговый сигнал преобразуется в частотно-модулированный в регулируемом преобразователе 12 напряжения в частоту, с выхода которого импульсы поступают на суммирующий вход разностного двоичного счетчика 15 и на информационный вход регистра 14, на сдвиговый вход которого поступают импульсы с выхода генератора 13, с помощью которого задается интервал усреднения. С выхода регистра 14 импульсы поступают на вьг1итающий вход счетчика 15. Таким образом, код на выходе счетчика 15 соответствует количеству возбужденных ячеек регистра 1А. Затем двоичный код преобразуется в цифроанапо- говом преобразователе 16 в анало- говьй сигнал, соответствующий усредненному значению, определяемому выражением (3),
Диапазон изменения частоты преобразователя 12 задается в соответст- .ВИИ с выбранной величиной интервала усреднения для максимального использования емкости регистра 14.
В качестве блока 7 селектирова- ния аналоговых сигналов можно использовать субблок селектирования аналоговых сигналов Ф 5196 (БМАСЗ), входящий в состав системы управления с переменной структурой (СУПС) комплекса КМ 2201.
В качестве ПИД-регулятора 11 можно использовать субблок, регулирующий с аналоговым выходом Ф 5179 (БРАЛ 1), также входящий в состав комплекса КМ 2201 (СУПС).
Использование способа формирования управляющего воздействия на привод поворота роторной стрелы роторнои макс (t)
У-- V zM
ll,(t}
Фu&,f
го экскаватора и устройства для его реализатдии по сравнению с прототипом обеспечивает значительное повышение эффективности и точности управления, максимально возможную производительность в конкретных горногеологических условиях при исключении выхода за номинальные пределы
режимов нагружения оборудования, агрегатов и металлоконструкций экскаватора, управление рабочим процессом по любому количеству физически разнородных параметров, характеризующих
интенсивность нагружения оборудования, агрегатов и металлоконструкций экскаватора при очевидной простоте осуществления, повьшение надежности и долговечности основных узлов зкскаватора, увеличение коэффициента
технического использования экскаватора во времени за счет уменьшения простоев, связанных с авариями или выходом из строя отдельных наиболее
важных узлов экскаватора, вызванных частыми отклонениями параметров, характеризующих интенсивность нагружения оборудования, агрегатов и металлоконструкций, за допустимые
пределы, сведение до минимума субъективного влияния оператора мащиниста роторного экскаватора на процесс экскавации.
u,(t)
12
. д станцию упраоления
прибодом поборота
А
/
h
Ф 4
Фиг,3
