пере ме ща ю ty/ ю - i и
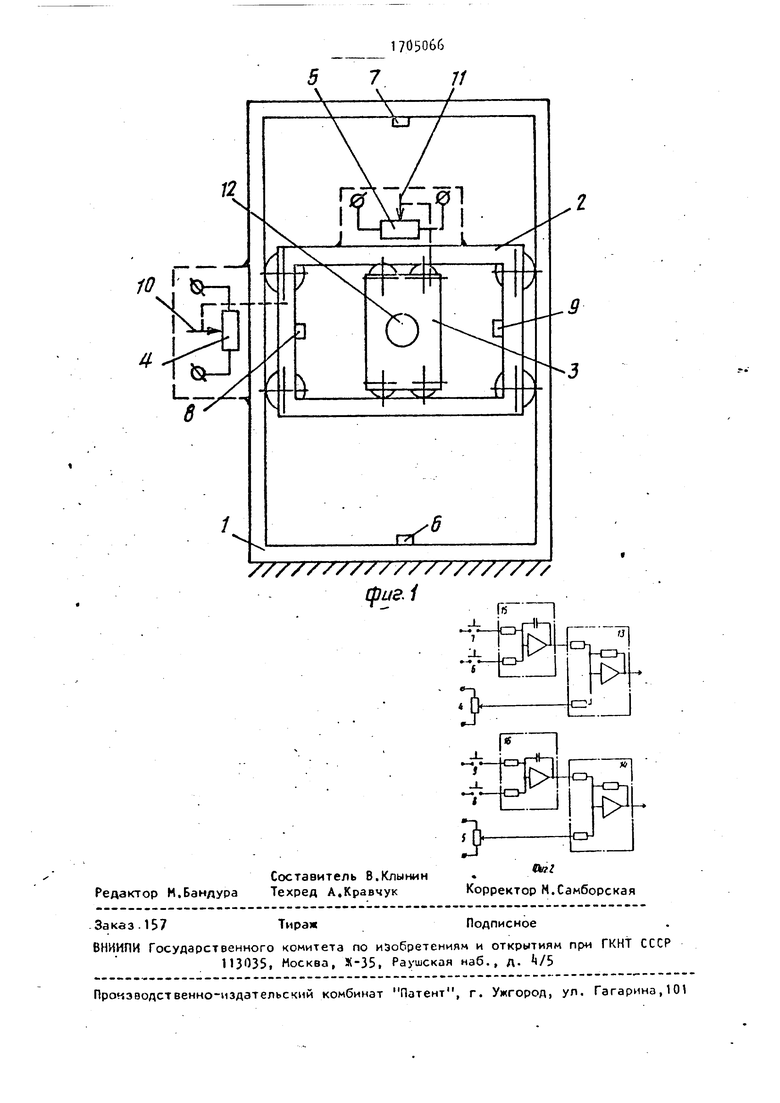
ка 2, вторую керетку 3, с омут;.) ; перзой, первый t и второй 5 датчики перемещений, концевые выключатели 6-9, выходы 10 и 11 псрпого и второго датчиков перемещений, рукоятку 12 умрлсления, первый 13 и «торой h сумматоры, первый 15 и второй 16 интеграторы, четыре источника постоянного напряжения.
Устройство работает следующим образом.
Управление исполнительным органом манипулятора осуществляется с no- мощью рукоятки 12 управления, размещенной на второй каретке 3, путем перемещения первой 2 и второй 3 кареток в основании 1 с направляющими. При этом сигналы на выходах 10 и 11 первого и второго датчиков 4, 5 пере-20 мещений, кинематически связанных соответственно с первой 2 и второй 3 каретками, изменяются по величине в соответствии с положением кареток 2, 3. Датчики kt 5 перемещений служат 25 для точной установки исполнительного органа манипулятора и обеспечивают его малые перемещения по двум координатам. Сигналы с выходов 10 и 11 первого и второго датчиков пере- зо мещений подаются соответственно на первые входы первого 13 и второго 1 сумматоров, выходные сигналы которых поступают на управление исполнительным органом манипулятора.
. При необходимости перехода из од- iной области рабочего пространства к другой оператор доводит каретки 2 и 3 ДО упора с соответствующими концевыми выключателями 6-3 Происходит до замыкание концевых выключателей, при этом напряжения источников постоянного напряжения через концевые выключатели поступают на входы интеграг торов 15, 1Ь, а с их выходов снимаются линейно возрастающие напряжения, которые подаются на вторые входы первого 13 и второго 1 t сумматоров. При этом выходные напряжения сумматоров 13 и 14 достаточны для перемещения исполнительного органа манипулятора о любую точку двухкоординатного рабочего пространства.
Следовательно, к каждому интегрз10
15
35
45
50
50664
тору 15, 16 через соотгзет ствующие концевые выключатели 6, 7 и 8, 9 подключены положительный и отрицательный источники постоянного напряжения, что обеспечивает перемещение исполнительного органа манипулятора по двум координатам в требуемом направлении .
05 о
до
0
Формула изобретения
Задающее устройство дистанционного полуавтоматического манипулятора, 5 содержащее основание с направляющими по котбрым перемещается первая каретка, вторую каретку, перемещающуюся внутри первой в направлении, ортогональном направлению перемещения первой каретки, рукоятку управления, размещенную на второй каретке, первый и второй датчики перемещений, расположенные соответственно на направляющей основания и направляющей первой каретки и кинематически связанные соответственно с первой и второй каретками, четыре источника постоянного напряжения, первый и второй сумматоры, первые входы которых соединены соответственно с выходами первого и второго датчиков перемещений, выходы сумматоров соединены соответственно с первым и вторым вы-, ходами устройства, отличающееся тем, что, с целью упрощения конструкции устройства, в него введены два концевых выключателя, установленных на основании с направляющими, два концевых выключателя, установленных на первой каретке, первый и второй интеграторы, выходы которых подключены соответственно к вторым входам первого и второго сумматоров первый и второй источники постоянного напряжения соединены соответственно через концевые выключатели, установленные на основании, с направляющими, с первым и вторым входами первого интегратора, третий и четвертый источники постоянного напряжения соединены соответственно через концевые оыклочатели, установлению на. первой каретке, с первым и вторым входами второго интегратора.
5
45
50
Л
12
s
7
11
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1983 |
|
SU1093541A1 |
| АГРЕГАТ ФРОНТАЛЬНЫЙ ДОЛИНСКОГО АФД, ИСПОЛНИТЕЛЬНЫЙ ОРГАН (ВАРИАНТЫ), ЦЕПЬ КОЛЬЦЕВАЯ, СТАВ АГРЕГАТА, МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПО ГИПСОМЕТРИИ, СЕКЦИИ КРЕПИ, ПЕРЕКРЫТИЕ, КРЕПЬ ВАНДРУТНАЯ, ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ, ПЕРЕГРУЖАТЕЛЬ (ВАРИАНТЫ), ГИДРОДВИГАТЕЛЬ ДЛЯ ЭМУЛЬСИИ, СРЕДСТВО УПРАВЛЕНИЯ, СРЕДСТВО КОНТРОЛЯ ГРАНИЦЫ "УГОЛЬ-ПОРОДА", СПОСОБЫ МОНТАЖА И САМОМОНТАЖА | 1996 |
|
RU2114996C1 |
| Устройство для копирования | 1987 |
|
SU1444132A1 |
| Устройство для управления манипулятором | 1979 |
|
SU930256A1 |
| Манипулятор | 1988 |
|
SU1604602A2 |
| Устройство для подгонки пленочных микроузлов | 1976 |
|
SU661617A1 |
| Задающее устройство манипулятора | 1985 |
|
SU1757874A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Устройство для управления дистанционным манипулятором | 1986 |
|
SU1355481A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ФРОНТАЛЬНОГО АГРЕГАТА | 2002 |
|
RU2209967C1 |
/
ч
X
/
/
а
/
/////
Составитель В.Клынин Редактор И.Бандура Техред А.Кравчук
-Заказ.157
Тираж
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР П3035, Москва, Х-35, Раушская наб., д. V5
/
i
;
ra
P--I
«te-J Корректор Н.Самборская
Подписное
