(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения глубины деформированного слоя обрабатываемой детали | 1980 |
|
SU918021A1 |
| Устройство для измерения износа ре-жущЕгО иНСТРуМЕНТА | 1978 |
|
SU829352A2 |
| Устройство для автоматического упавления процессом механической обработки | 1989 |
|
SU1673387A1 |
| Устройство для диагностики состояния процесса резания | 1983 |
|
SU1122476A1 |
| Устройство для определения информации о параметрах процесса резания | 1983 |
|
SU1119825A1 |
| Приемник многочастотных сигналов | 1985 |
|
SU1284007A1 |
| Устройство для определения износостойкости режущего инструмента | 1980 |
|
SU1026038A1 |
| Устройство управления точностью на металлорежущем станке | 1980 |
|
SU918022A1 |
| Способ автоматического выбора и поддержания оптимальных режимов обработки | 1981 |
|
SU1024161A1 |
| Устройство для управления положением магнитной головки относительно строчки записи | 1986 |
|
SU1327176A1 |
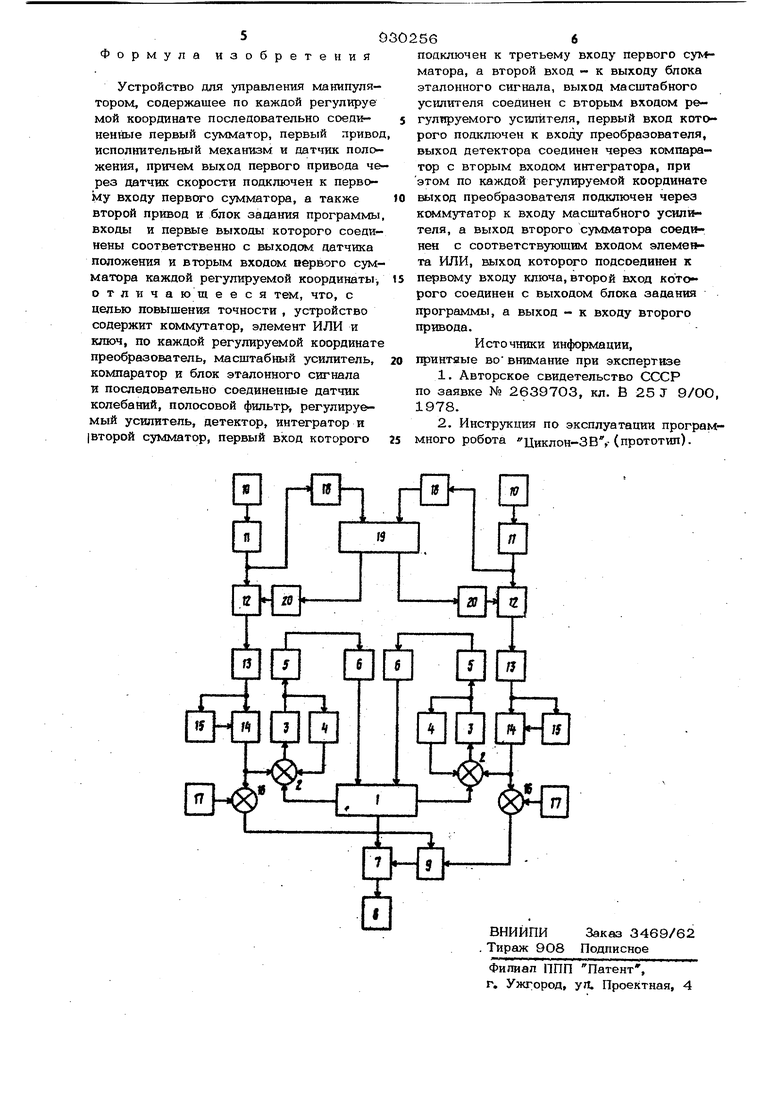
Изобретение относится к рооототехн&« ке и может быть использовано при создании устройств для упрарпения пргаллшпенными роботами с высокой точностью позиционирования. Известно устройство для управления манипулятором, содержащее блок задания программы, приводы кос здинат, датчики положения и скорости и логический блсж Однако это ;устройство имеет;- иизкую точность позиционирования. Наиболее близким по технической сущности к изобретению является устройство, содержащее по каждой регулируемой координате последовательно соединен ные первый сумматор, первый привод, исполнительный механизм и датчик положения, причем выход первого привода через датчик скорости подключен к пер вому входу первого сумматора, а также второй привод и блок задания программы входы и первые выходы которого соедине ны соответственно с выходом датчика положения и вторым входом первого сумматора каждой регулщэуемой координа ты 23. Недостатком известного устройства является низкая точность позипирования обуслсжлениая и левением динамической жесткости основных узлов манипулятора и возбуждением паразит шх автоколебаний к волновых процессов в упругой мехаввческой системе. Цель взобретегаы - повышение точности устройства. Цель достигается тем, что устройство содержит коммутатор, элемент ИЛИ н ключ и по каждой регулируемой коордвнате преобразователь, масштабный усилитель. Компаратор н блок эталонного сигвал и последовательно соединенные дат чик колебаний, полосовой фильтр, регу лируемый усилитель, детектор, интегратор и вт(фой сумматор, первый вход которого подключен к третьему входу первого cyt/ матора, а второй вход - к выходу блока эталонного сигнала, выход масштабного усюштеля соединен с вторым вкоая/м р&. 39302564 ryjiHTjyeMoro усилителя, первый вход ко- ИЛИ 9 подается напряжение с выхода торого подключен к входу преобраоовате-второго канала, полученное аналогичным ля, выход детектора соединен через ком-образом при измерении колебат-1й в вер- паратор с вторым входом интегратора,тикальном направлении. Только при отсутпри этом по каждой регулируемой коораи- 5ствии сигнала запрета на выходе обоих нате выход преобразователя подключенканалов и при наличии команды с блока 1 через коммутатор к входу масштабного задания программы открывается ключ 7 усилителя, а выход второго сумматораи срабатывает привод 8 схвата. соединен с соответствующим входом эле-Для задания требуемой точности позимента ИЛИ, выход которого подсоединен 10ционирования, которая может быть разк первому входу ключа, второй вход ко-лична в зависимости от выполняемой маторого соединен с выходом блока заданиянипулятором операции, в устройстве препрограммы, а выход - к входу второгодусмотрено ручное управление величиной привода.сигналов блоков 17 эталонного сигнала. На чертеже представлена функциональ- ts Напряжение с выхода интегратора 14 ная схема устройства.в обоих каналах воздействует через сумУстройство содержит блок 1 заданияматоры 2 и уменьшает скорость движепрограммы, первые сумматоры 2, при-шш манипулятора в направлении измереводы 3, датчики 4 скорости, исполнитель-ния. Так как интенсивность колебательных ные механизмы 5, датчики 6 положения, 20смешений (скорость их затухания опреключ 7, привод 8 схвата, элемементделяется добротностью контура механичесИЛИ 9, датчики 10 колебаний, полосовыекой cncTSMii) различна в вертикальном и фильтры 11, регулируемые усилители 12,горизонтальном направлениях и зависит детекторы 13, интеграторы 14, компара-от нагрузки, скорость интегрирования в торы 15, вторые сумматоры 16, блоки 25интеграторах 14 переменна и определяет17 этапорного сигнала, преобразователися величиной напряжения на выходах детек18, коммутатор 19, масштабные усили-торов 13, которая посредством блоков 15 тели 2О.управляет постоянной времени интегрироУстройство работает следующим обра-вания. Возбуждение колебаний одновоемензом. 30но в двух направлениях приводит, к обраКолебания, возникающие в испопнитель-зованию спожной формы колебаний в сисном органе манипулятора, рег 1стрируюттеме, достигающих в импульсе значительи преобразуют в электрический сигналных амплитуд, с явно проявляющейся крудатчики колебаний 10, установленные вотильной составляющей колебаний в мехавзаимно перпендикуляр 1ых осях меха-низме схвата, влияющей на точность позинизма схвата, и подают на вход полосо-ционирования. В связи с этим в устройвых ({мльтров 11 соответствующих каналовстве предусмотрена автоматическая переизмерения. Ширина полосы пропусканиястройка коэффициентов усиления регули фильтров 11 .определяется требуемымируемых усилителей 12 обоих каналов, раусловиями помехозащищенности устрой-ботающая только при условии, если на ства и выбирается относительно узкой.тйх вхйдах одновременно появляются чаоВерхняя граница полосы пропускания опре-тотные составляющие сигналов. Это деляется наивысшей собственной часто-достигается тем, что переменный сигнал той механической упругой системы, состоя-с выхода полосовых фильтров 11 из исполнительного органа и меха-вается с одновременным преобразованием низма схвата без нагрузки. Сигналы св постоянный преобразователями 18 и выходов полосовых фильтров 11 усили-подается на коммутатор 19. Выходное веются регулируемыми усилителями 12,напряжение последнего через соответствуюдетектируются детекторами 13, усредня-щие масштабные, усилители 20 управляет ются интеграторами 14, время интегри-коэффициентом усиления усилителей 12. рования которых зависит от выходного °. Коэффициент передачи масштабных усил напряжения каналов и определяется ком-телей 2О в каждом канале выбирается параторами 15, сравнивается во вторыхпропорциональным добротности своего ме- сумматорах 16с допустимыми значения-ханического контура в соответствии с ми амплитуды, задающими блоками 17направлением измерения. эталонного сигнала, после чего управляю- Применение изобретения позволит щее напряжение подается на управляющийисключить влияние динамической жествход электронного ключа 7 через эле-кости исполнительного органа на точмент ИЛИ 9. На второй вход элементаность позиционирования манипулятора.
