Изобретение относится к области робототехники и может быть испопьзовано, например, для дистанционного управления манипуляторами.
Целью изобретения является расширение функциональных возможностей задающего устройства.
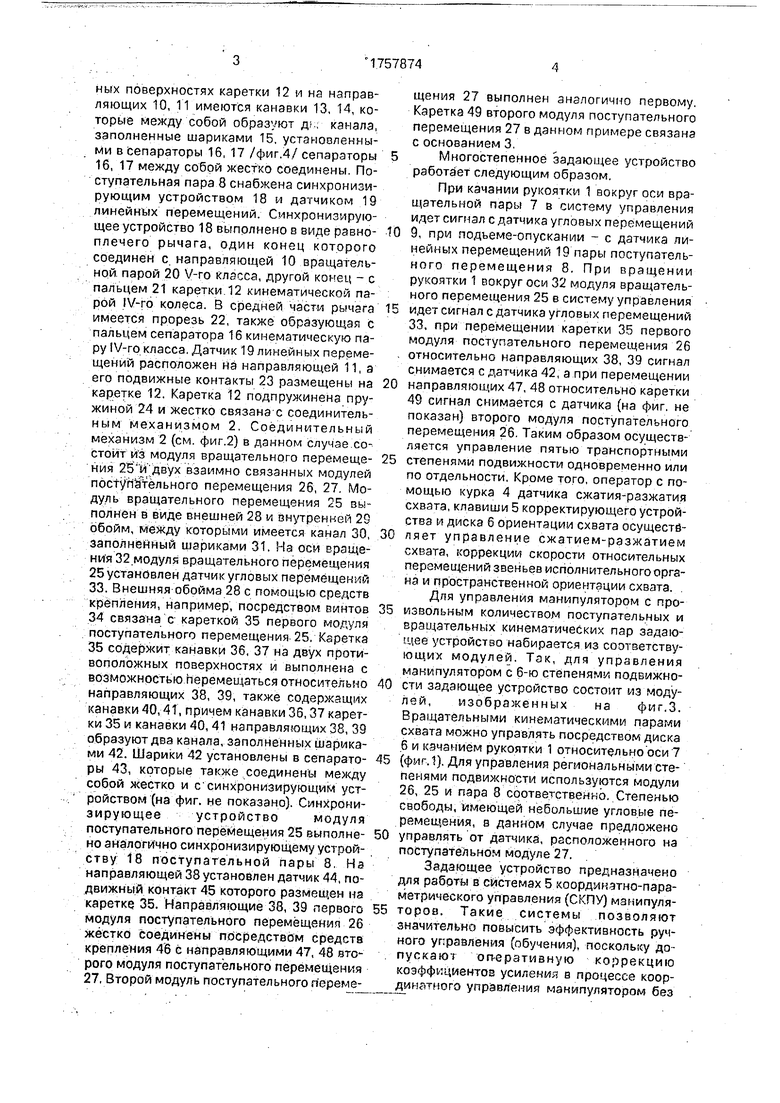
На фиг.1 показан пример выполнения задающего устройства.
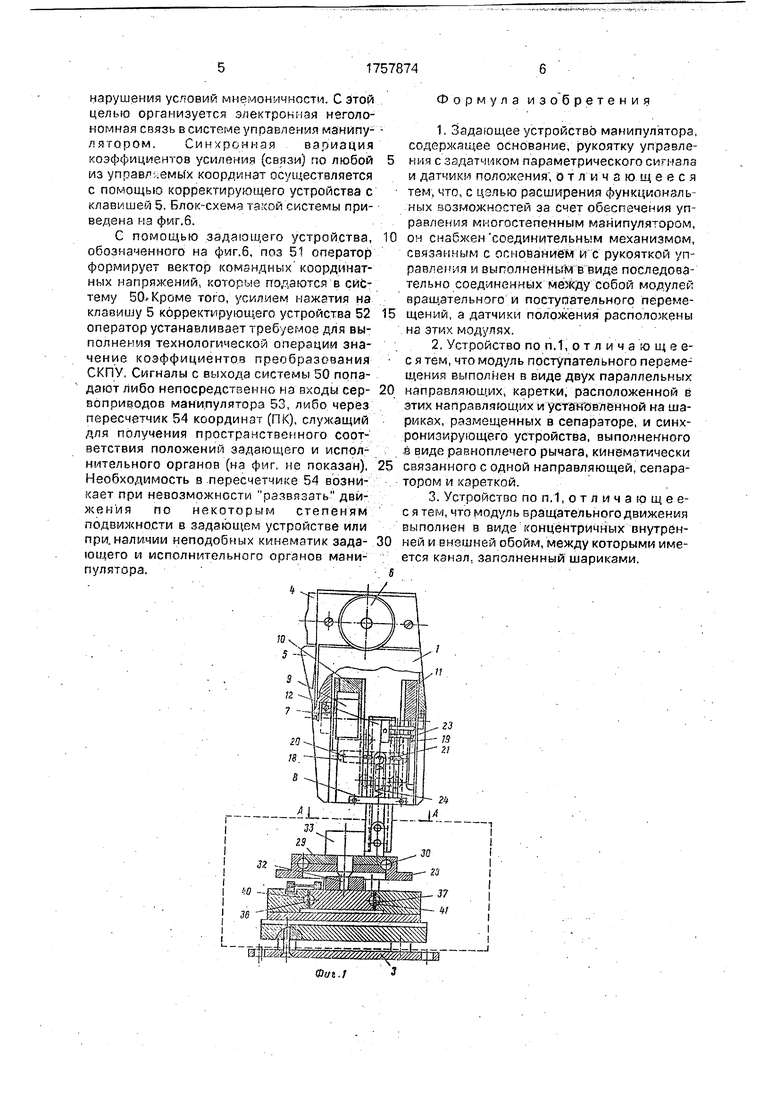
На фиг 2 - соединительный механизм задающего устройства /разрез А - А на фиг 1/,
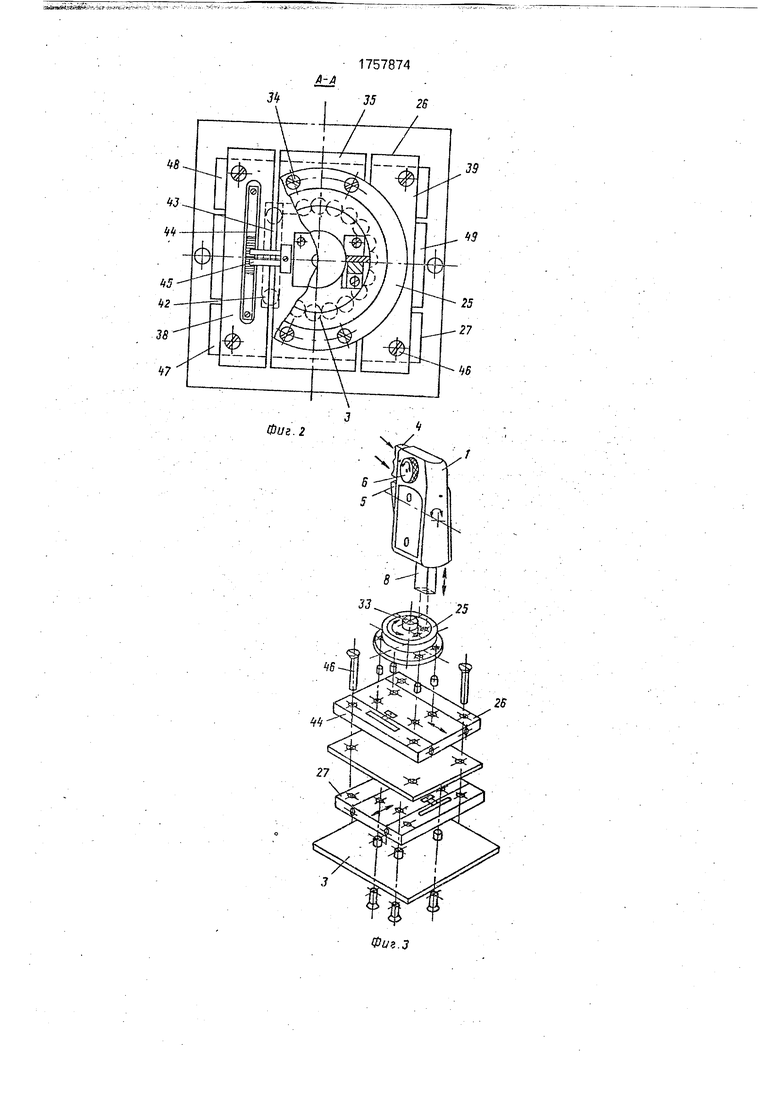
На фиг 3 - задающее устройство /деталировка, аксонометрия/, на фиг 4 - синхронизирующее устройство.
На фиг 5 - то же, вид А на фиг.4; на фиг 6 - блок-схема устройства
Многостепенное задающее устройство состоит из рукоятки 1 управления, соединительного механизма 2 и основания 3. Рукоятка 1 управления включает в себя курок 4 датчика сжатия-разжатия захвата /на ф.,. не показан/, клавишу 5 корректирующего устройства /на фиг. не показано/, диск 6 ориентации схвата, вращательную 7 и поступательную 8 пары V-ro класса. На оси вращательной лары 7 установлен датчик 9 угловых перемещений. Поступательная пара 8 выполнена в виде двух направляющих 10 11 и каретки 12 На двух противоположXI
ных поверхностях каретки 12 и на направляющих 10, 11 имеются канавки 13, 14, которые между собой образуют д/, канала, заполненные шариками 15, установленными в сепараторы 16, 17 /фиг.4/ сепараторы 16, 17 между собой жестко соединены. Поступательная пара 8 снабжена синхронизирующим устройством 18 и датчиком 19 линейных перемещений. Синхронизирующее устройство 18 выполнено в виде равно- плечего рычага, один конец которого соединен с направляющей 10 вращательной парой 20 V-ro класса, другой конец - с пальцем 21 каретки 12 кинематической парой IV-ro колеса. В средней части рычага имеется прорезь 22, также образующая с пальцем сепаратора 16 кинематическую пару IV-ro класса. Датчик 19 линейных перемещений расположен на направляющей 11, а его подвижные контакты 23 размещены на каретке 12, Каретка 12 подпружинена пружиной 24 и жестко связана с соединительным механизмом 2. Соединительный механизм 2 (см. фиг.2) в данном случае состоит из модуля вращательного перемеще- ния 25 и двух взаимно связанных модулей поступательного перемещения 26, 27. Модуль вращательного перемещения 25 выполнен в виде внешней 28 и внутренней 29 обойм, между которыми имеется канал 30, заполненный шариками 31. На оси вращения 32 модуля вращательного перемещения 25 установлен датчик угловых перемещений 33. Внешняя обойма 28 с помощью средств крепления, например, посредством винтов
34связана с кареткой 35 первого модуля поступательного перемещения 25. Каретка
35содержит канавки 36, 37 на двух противоположных поверхностях и выполнена с возможностью перемещаться относительно направляющих 38, 39, также содержащих канавки 40,41, причем канавки 36,37 каретки 35 и канавки 40, 41 направляющих 38, 39 образуют два канала, заполненных шариками 42. Шарики 42 установлены в сепарато- ры 43, которые также соединены между собой жестко и с синхронизирующим устройством (на фиг. не показано). Синхронизирующее устройство модуля поступательного перемещения 25 выполне- но аналогично синхронизирующему устройству 18 поступательной пары 8. На направляющей 38 установлен датчик 44, подвижный контакт 45 которого размещен на каретке, 35. Направляющие 38, 39 первого модуля поступательного перемещения 26 жестко соединены посредством средств крепления 46 с направляющими 47, 48 второго модуля поступательного перемещения 27, Второй модуль поступательного перемещения 27 выполнен аналогично первому. Каретка 49 второго модуля поступательного перемещения 27 в данном примере связана с основанием 3,
Многостепенное задающее устройство работает следующим образом.
При качании рукоятки 1 вокруг оси вращательной пары 7 в систему управления идет сигнал с датчика угловых перемещений 9, при подъеме-опускании - с датчика пи- нейиых перемещений 19 пары поступательного перемещения 8. При вращении рукоятки 1 вокруг оси 32 модуля вращательного перемещения 25 в систему управления идет сигнал с датчика угловых перемещений 33, при перемещении каретки 35 первого модуля поступательного перемещения 26 относительно направляющих 38, 39 сигнал снимается с датчика 42, а при перемещении направляющих 47, 48 относительно каретки 49 сигнал снимается с датчика (на фиг. не показан) второго модуля поступательного перемещения 26. Таким образом осуществляется управление пятью транспортными степенями подвижности одновременно или по отдельности. Кроме того, оператор с помощью курка 4 датчика сжатия-разжатия схвата, клавиши 5 корректирующего устройства и диска 6 ориентации схвата осуществляет управление сжатием-разжатием схеатз, коррекции скорости относительных перемещений звеньев исполнительного органа и пространственной ориентации схвата.
Для управления манипулятором с произвольным количеством поступательных и вращательных кинематических пар задающее устройство набирается из соответствующих модулей. Так, для управления манипулятором с 6-ю степенями подвижности задающее устройство состоит из модулей, изображенных на фиг.З. Вращательными кинематическими ларами схвзта можно управлять посредством диска 6 и качанием рукоятки 1 относительно оси 7 (фиг. 1). Для управления региональными степенями подвижности используются модули 26, 25 и пара 8 соответственно. Степенью свободы, имеющей небольшие угловые перемещения, в данном случае предложено управлять от датчика, расположенного на поступательном модуле 27.
Задающее устройство предназначено для работы в системах 5 координзтно-пара- метрического управления (СКПУ) манипуляторов. Такие системы позволяют значительно повысить эффективность ручного управления (обучения), поскольку допускают оп-ерзтивную коррекцию козффкциентоз усиления в процессе координатного управления манипулятором без
нарушения условий мнемонччности. С этой целью организуется электронная неголо- номная связь в системе управления манипу- лятором. Синхронная вариация коэффициентов усиления (связи) по любой из управл .емых координат осуществляется с помощью корректирующего устройства с клавишей 5. Блок-схема тччой системы приведена 3 фМГ.б.
С помощью задающего устройства, обозначенного на фиг.6, поз 5 оператор формирует вектор командных координатных напряжений, которые подаются в систему 50 Кроме того, усилием нажатия на клавишу 5 корректирующего устройства 52 оператор устанавливает требуемое для выполнения технологической операции значение коэффициентов преобразования СКПУ Сигналы с выхода системы 50 попадают либо непосредственно на входы сер- воприводов манипулятора 53, либо через пересчетчик 54 координат (ПК), служащий для получения пространственного соответствия положений задающего и исполнительного органов (на фиг не показан). Необходимость в пересчетчике 54 возникает при невозможности развязать движения по некоторыр степеням подвижности в задающем устройстве или при. наличии неподобных кинематик зада- юидего и исполнительного органов манипулятора.
4
ю
-И
Й32Й й2й2ййййййЙ2 Фг/8 /У
Формула изобретения
1, Задающее устройство манипулятора, содержащее основание, рукоятку управления с садатчмком параметрического сигнала и датчики положения, отличающееся тем, что, с цзтью расширения функционзль ных возможностей за счет обеспечения управления многостепенным манипулятором, он снабжен соединительным механизмом, связанным с основанием и с рукояткой управления и выполненным в виде последовательно соединенных между собой модулей вращательного и поступательного перемещений, а датчики положения расположены на этих модулях.
2.Устройство по п.1, о т л и ч а ю щ е е- с я тем, что модуль поступательного перемещения выполнен в виде двух параллельных направляющих, каретки, расположенной в этих направляющих и установленной на шариках, размещенных в сепараторе, и синхронизирующего устройства, выполненного в виде равноплечего рычага, кинематически связанного с одной направляющей, сепаратором и кареткой.
3.Устройство по п.1, о т л и ч а ю щ е е- с я тем, «то модуль вращательного движения выполнен в виде концентричных внутренней и внешней обойм, между которыми имеется канал заполненный шариками.
| название | год | авторы | номер документа |
|---|---|---|---|
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| КОМБИНИРОВАННЫЙ МАНИПУЛЯТОР РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2721485C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| СИСТЕМА ИМИТАЦИИ АКСЕЛЕРАЦИОННЫХ ВОЗДЕЙСТВИЙ ПОЛУНАТУРНОГО МОДЕЛИРУЮЩЕГО КОМПЛЕКСА ЭРГОНОМИЧЕСКОГО ПРОЕКТИРОВАНИЯ | 2024 |
|
RU2834755C1 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ КУРСОРОМ - КОМПЬЮТЕРНЫЙ КУРСОГРАФ, МЕХАНИЗМ СКАНИРОВАНИЯ, КОМБИНИРОВАННАЯ КЛАВИАТУРА И КАРМАННЫЙ КОМПЬЮТЕР С БЕССЕНСОРНЫМ ДИСПЛЕЕМ | 2006 |
|
RU2319999C1 |
| Манипулятор | 1982 |
|
SU1114549A1 |
| Манипулятор внутрикамерный | 2021 |
|
RU2785920C1 |
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МАНИПУЛЯТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2720841C1 |
| Многофункциональный робототехнический комплекс для мониторинга технического состояния, окружающего пространства и проведения технического обслуживания крупногабаритного объекта в сооружении | 2021 |
|
RU2776474C1 |
Задающее устройство предназначено для дистанционного управления многостепенным манипулятором с большим числом степеней подвижности. Оно содержит рукоятку управления, связанную с основанием соединительным механизмом. Особенностью устройства является то, что соединительный механизм выполнен в виде последовательно соединенных модулей поступательного и вращательного перемещений о общем количестве, равном числу подлежащих управлению степеней подвижности многостепенного манипулятора. На каждом модуле размещены датчики положения Модуль поступательного перемещения состоит из каретки, направляющих и синхронизирующего устройства. Модуль вращательного перемещения выполнен в виде внешней и внутренней концентричных обойм, между которыми имеется канал, заполненный шариками Синхронизирующее устройство имеет равноплечий рычаг, кинематически связанный с направляющей, сепаратором и кареткой. Последовательное соединениэ модулей вращательного и поступательного перемещений позволяет расширить функциональные возможности манипуляторов за счет обеспечения управления манипуляторами, имеющими различное число степеней подвижности. 6 ил
| Манипулятор | 1974 |
|
SU561656A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
