2. Система по п.1, отличающаяся тем, что узел возврата штока в исходное положение включает в себя установленные в надмембранной полости пневмоцилиндра регулировочную гайку, смонтированную на корпусе последнего, и пружину, которая установлена между мембраной и регулировочной гайкой
199738
с возможностью взаимодействия с ними.
3. Система по п,1, о т л и ч а ю. щ а я с я тем, что узел возврата штока в исходное положение представляет собой регулятор давления, вход которого сообщен с напорной магистралью,а выход- снадмимбранной полостью .пневмоцилиндрадатчика веса.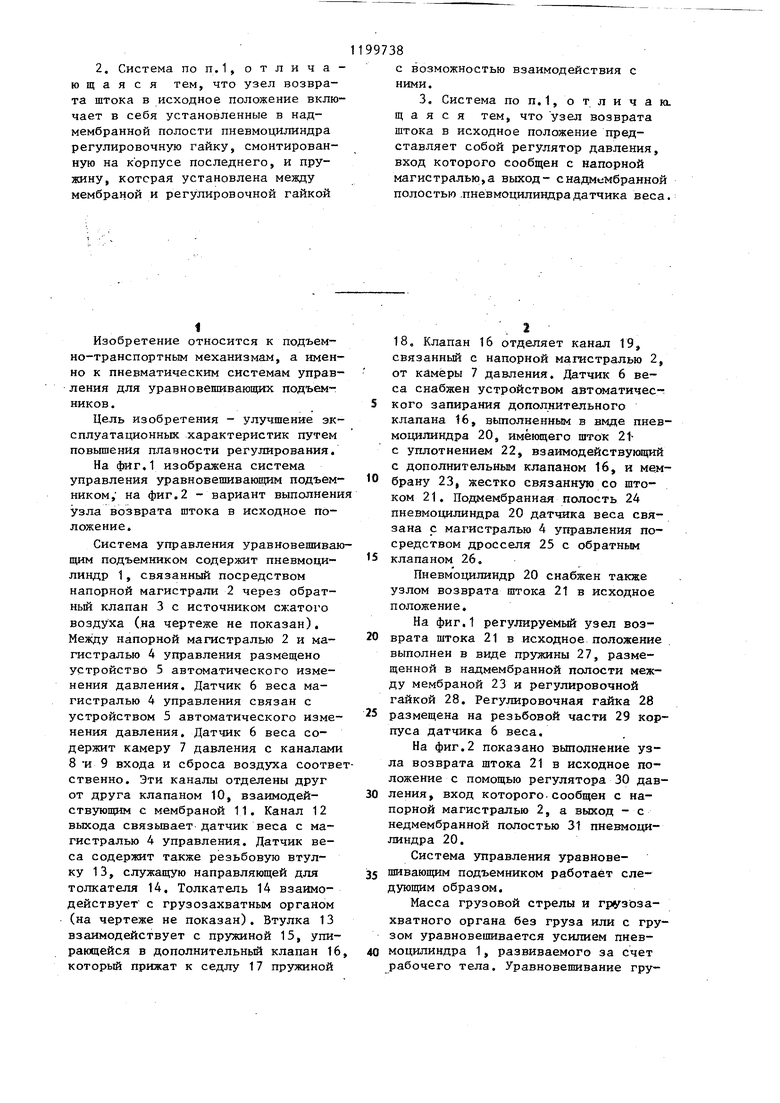
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления уравновешивающим подъемником | 1986 |
|
SU1331805A1 |
| Система управления уравновешивающим подъемником | 1983 |
|
SU1221191A2 |
| Устройство для управления уравновешивающим подъемником | 1988 |
|
SU1569317A1 |
| Система управления уравновешивающим подъемником | 1985 |
|
SU1294755A1 |
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Подъемник-манипулятор с уравновешиванием груза (его варианты) | 1984 |
|
SU1225805A1 |
| Устройство для управления пневматическим уравновешивающим стреловым подъемником | 1984 |
|
SU1328279A1 |
| Система управления уравновешивающим подъемником | 1986 |
|
SU1348290A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И ЗАЩИТЫ МНОГООПОРНОЙ ДОЖДЕВАТЕЛЬНОЙ МАШИНЫ | 1991 |
|
RU2017406C1 |
| Манипулятор | 1983 |
|
SU1178584A1 |
1. СИСТЕМА УПРАВЛЕНИЯ УРАВНОВЕШИВАЮЩИМ ПОДЪЕМНИКОМ по авт.св. № 655638, отличающаяся тем, что, с целью улучшения эксплуатационных характеристик путем повышения плавности регулирования, датчик веса снабжен пневмоцилиндром, в корпусе которого смонтирована мембрана с жестко связанным с ней штоком, установленным в надмембранной полости с возможностью взаимодействия с дополнительным клапаном, и узлом возврата штока в исходное положение, а система управления снабжена параллельно установленными дросселем и обратньм клапаном, через которые- подмембранная полость пневмодилиндра сообщена с гистралью управления. (Л со со 00 00
Изобретение относится к подъемно-транспортным механизмам, а именно к пневматическим системам управления для уравновешивающих подъемников .
Цель изобретения - улучшение эксплуатационных характеристик путем повышения плавности регулирования.
На фиг.1 изображена система управления уравновешивающим подъемником, на фиг.2 - вариант выполнени узла возврата штока в исходное положение.
Система управления уравновешивающим подъемником содержит пневмоцилиндр 1, связанный посредством напорной магистрали 2 через обратньй клапан 3 с источником сжатого воздуха (на чертеже не показан), Между напорной магистралью 2 и магистралью 4 управления размещено устройство 5 автоматического изменения давления. Датчик 6 веса магистралью 4 управления связан с устройством 5 автоматического изменения давления. Датчик 6 веса содержит камеру 7 давления с каналами 8 -и 9 входа и сброса воздуха соотвественно. Эти каналы отделены друг от друга клапаном 10, взаимодействующим с мембраной 11, Канал 12 выхода связьшает датчик веса с магистралью 4 управления. Датчик веса содержит также резьбовую втулку 13, служащую направляющей для толкателя 14, Толкатель 14 взаимодействует с грузозахватным органом (на чертеже не показан), Втулка 13 взаимодействует с пружиной 15, упирающейся в дополнительный клапан 16 которьй прижат к седлу 17 пружиной
18, Клапан 16 отделяет канал 19, связанный с напорной магистралью 2, от камеры 7 давления. Датчик 6 веса снабжен устройством автоматического запирания дополнительного
клапана 16, вьтолненным в вмде пневмоцилиндра 20, имеющего шток 21с уплотнением 22, взаимодействующий с дополнительным клапаном 16, и мембрану 23, жестко связанную со штоком 21, 11ода1ембранная полость 24 пневмоцилиндра 20 датчика веса связана с магистралью 4 управления посредством дросселя 25 с обратным
клапаном 26,
Пневмоцияиндр 20 снабжен также узлом возврата штока 21 в исходное положение.
На фиг,1 регулируемый узел возврата штока 21 в исходное положение выполнен в виде пружины 27, размещенной в надмембранной полости между мембраной 23 и регулировочной гайкой 28, Регулировочная гайка 28
размещена на резьбовой части 29 корпуса датчика 6 веса.
На фиг,2 показано выполнение узла возврата штока 21 в исходное положение с помощью регулятора 30 давления, вход которого.сообщен с напорной магистралью 2, а выход - с недмембранной полостью 31 пневмоцилиндра 20,
Система управления уравновешивающим подъемником работает следующим образом.
Масса грузовой стрелы и грузьзахватного органа без груза или с грузом уравновешивается усилием пневмоцилиндра 1, развиваемого за счет рабочего тела. Уравновешивание гру
| Система управления уравновешивающим подъемником | 1977 |
|
SU655638A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
