Изобретение относится к области машиностроения и может быть использо- вано в роботизированных технологических комплексах механообработки и сборки.
Целью изобретения является расширение технологических возможностей за счет обеспечения ориентации деталей с различной высотой расположения осей радиальных отверстий.
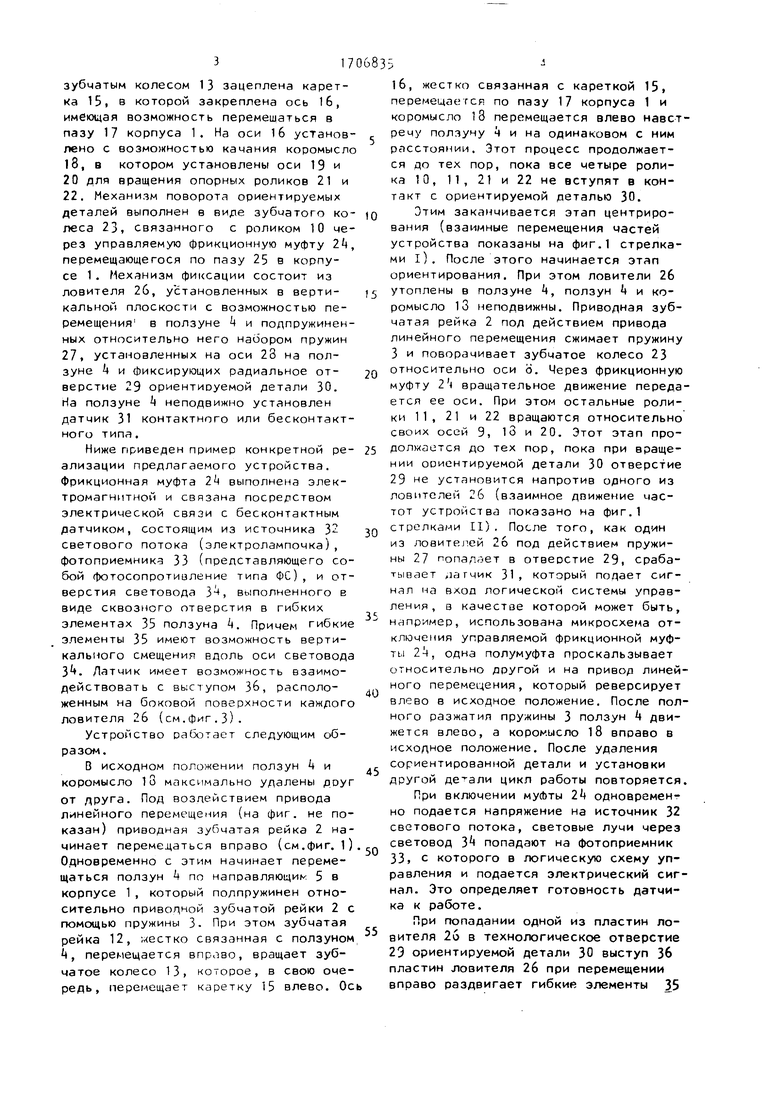
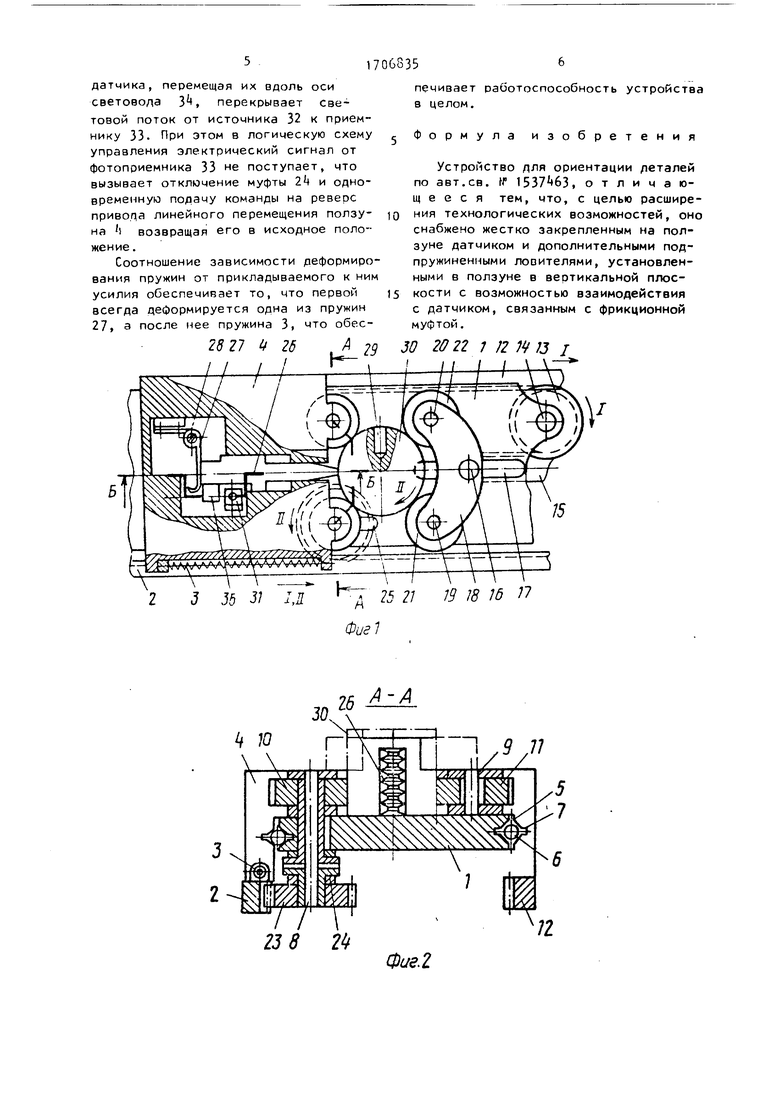
На фиг.1 изображен общий вид устройства для ориентации деталей, вид сверху; на фиг.2 - сечение А-А на фиг.1; на фиг.З - сечение Б-Б на фиг.1.
Устройство для ориентации деталей содержит корпус 1, в котором расположены взаимосвязанные между собой механизм центрирования ориентируемых деталей и механизм фиксации. Механизм центрирования содержит приводную зубчатую рейку 2, подпружиненную с помощью пружины 3 относительно ползуна , который имеет возможность линейного перемещения относительно корпуса 1 в направляющих 5 на шариках 6, установленных в сепараторе 7 (см.фиг.2). На ползуне Ц установлены оси 8 и 9 с вращающимися ведущим 10 и опорным 11 роликами. На ползуне А жестко закреплена зубчатая рейка 12, которая зацеплена с колесом 13, выполненным вращающимся относительно оси , установленной в корпусе 1. С паразитным
VI
О О 00 OJ
ел
1Ч
317
зубчатым колесом 13 зацеплена каретка 15, в которой закреплена ось 16, имеющая возможность перемещаться в пазу 17 корпуса 1. На оси 16 установ- лено с возможностью качания коромысло 18, в котором установлены оси 19 и 20 для вращения опорных роликов 21 и 22. Механизм поворота ориентируемых деталей выполнен в виде зубчатого ко- леса 23, связанного с роликом 10 через управляемую фрикционную муфту 2, перемещающегося по пазу 25 в корпусе 1. Механизм фиксации состоит из ловителя 26, установленных в верти- кальной плоскости с возможностью перемещения1 в ползуне h и подпружиненных относительно него набором пружин 27, установленных на оси 28 на ползуне k и фиксирующих радиальное от- верстие 29 ориентируемой детали 30. На ползуне неподвижно установлен датчик 31 контактного или бесконтактного типа.
Ниже приведен пример конкретной ре- ализации предлагаемого устройства. Фрикционная муфта 2 выполнена электромагнитной и связана посредством электрической связи с бесконтактным датчиком, состоящим из источника 32 светового потока (электролампочка), фотоприемника 33 (представляющего собой фотосопротивление типа ФС), и отверстия световода 3, выполненного в виде сквозного отверстия в гибких элементах 35 ползуна А. Причем гибкие элементы 35 имеют возможность вертикального смещения вдоль оси световода 3. Летчик имеет возможность взаимодействовать с выступом 36, располо- женным на боковой поверхности каждого ловителя 26 (см.фиг.3).
Устройство работает следующим образом.
В исходном положении ползун k и коромысло 1о максимально удалены доуг от друга. Под воздействием привода линейного перемещения (на фиг. не показан) приводная зубчатая рейка 2 начинает перемещаться вправо (см.фиг. 1) Одновременно с этим начинает перемещаться ползун k по направляющие 5 в корпусе 1, который подпружинен относительно приводной зубчатой рейки 2 с помощью пружины 3- При этом зубчатая рейка 12, жестко связанная с ползуном А, перемещается вправо, вращает зубчатое колесо 13, которое, в свою очередь, перемещает каретку 15 влево. Ос
г 5 0
5 Q ,Q
.г Q
5
16, жестко связанная с кареткой 15, перемещается по пазу 17 корпуса 1 и коромысло 18 перемещается влево навстречу ползуну ц и на одинаковом с ним расстоянии. Этот процесс продолжается до тех пор, пока все четыре ролика 10, 11, 21 и 22 не вступят в контакт с ориентируемой деталью 30.
Этим заканчивается этап центрирования (взаимные перемещения частей устройства показаны на фиг.1 стрелками I). После этого начинается этап ориентирования. При этом ловители 26 утоплены в ползуне А, ползун и коромысло 13 неподвижны. Приводная зубчатая рейка 2 под действием привода линейного перемещения сжимает пружину 3 и поворачивает зубчатое колесо 23 относительно оси о. Через фрикционную муфту 2) вращательное движение передается ее оси. При этом остальные ролики 11, 21 и 22 вращаются относительно своих осей 9, 1о и 20. Этот этап продолжается до тех пор, пока при вращении ориентируемой детали 30 отверстие 29 не установится напротив одного из ловителей 26 (взаимное движение частот устройства показано на фиг.1 стрелками II). После того, как один из ловителей 26 под действием пружины 27 попадает в отверстие 29, срабатывает датчик 31, который подает сигнал на вход логической системы управления, в качестве которой может быть, например, использована микросхема отключения управляемой фрикционной муфты , одна полумуфта проскальзывает относительно другой и на привод линейного перемещения , который реверсирует влево в исходное положение. После полного разжатия пружины 3 ползун k движется влево, а коромысло 18 вправо в исходное положение. После удаления сориентированной детали и установки другой делали цикл работы повторяется.
При включении муфты одновремент но подается напряжение на источник 32 светового потока, световые лучи через световод 3 попадают на фотоприемник 33, с которого в логическую схему управления и подается электрический сигнал. Это определяет готовность датчика к работе.
При попадании одной из пластин ловителя 26 в технологическое отверстие 29 ориентируемой детали 30 выступ 36 пластин ловителя 26 при перемещении вправо раздвигает гибкие элементы 35
датчика, перемещая их вдоль оси световода З4, перекрывает световой поток от источника 32 к приемнику 33. При этом в логическую схему управления электрический сигнал от фотоприемника 33 не поступает, что вызывает отключение муфты и одновременную подачу команды на реверс привода линейного перемещения ползуна возвращая его в исходное положение .
Соотношение зависимости деформирования пружин от прикладываемого к ним усилия обеспечивает то, что первой всегда деформируется одна из пружин 27, а после нее пружина 3, что обес2827 Ц 26 .А 29
печивает работоспособность устройства в целом.
Формула изобретения
Устройство для ориентации деталей по авт.св. N- , отличающееся тем, что, с целью расширения технологических возможностей, оно снабжено жестко закрепленным на ползуне датчиком и дополнительными подпружиненными ловителями, установленными в ползуне в вертикальной плоскости с возможностью взаимодействия с датчиком, связанным с фрикционной муфтой.
JO
I
20 22 ; J2 П 13 I III V
19 18 W 11
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ориентации деталей | 1988 |
|
SU1537463A1 |
| Устройство для подачи штучных заготовок в зону обработки | 1987 |
|
SU1433590A1 |
| Устройство для ориентирования при сборке детали типа втулки с боковым отверстием | 1980 |
|
SU946879A2 |
| Станок для сборки трубчатых секций теплообменников | 1977 |
|
SU656707A1 |
| Устройство для запрессовки втулок | 1984 |
|
SU1183344A1 |
| Устройство для ориентации длинномерных заготовок | 1978 |
|
SU700248A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| АВТОМАТИЧЕСКИЙ ПРОИГРЫВАТЕЛЬ ГРАММОФОННЫХПЛАСТИНОК | 1967 |
|
SU205710A1 |
| Хонинговальный станок для обработки цилиндрических поверхностей | 1986 |
|
SU1563951A2 |
| Загрузочное устройство | 1975 |
|
SU558776A1 |
Изобретение относится к области машиностроения и может быть использовано в роботизированных технологических комплексах механосборки и сборки. Целью изобретения является расширение технологических возможностей за счет обеспечения ориентации деталей с различной высотой расположения осей радиальных отверстий. Устройство для ориентирования деталей содержит ползун ) с роликами, каретку 15 с коромыслом 1о и опорными роликами 21 и 22, Под действием приводной рейки 2 ползун Ц и каретка 15 с коромыслом 18 двинутся навстречу друг другу до момента взаимодействия их роликов с деталью 30. Затем ведущий ролик ползуча через зубчатое колесо, связанное с приводной рейкой 2, осуществляет поворот детали 30 до западания одного из ловителей 26 в ее радиальное отверстие 29. Момент западания ловителя 26 в отверстие 29 фиксируется датчиком 31, который подает команду на реверс приводной рейки 2. 3 ил. г (Л
А-А
11
Фие.2
/
36
Фие.З
26
29
| Электрический замок | 1923 |
|
SU1537A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| ( УСТРОЙСТВО ЛЛЯ ОРИЕНТАЦИИ ДЕТАЛЕЙ | |||
