Изобретение относится к сельскохозяйственному машиностроению, в частности к способам механизированного съема урожая ягодных кустарников.
Целью изобретения является повышение эффективности съема ягод.
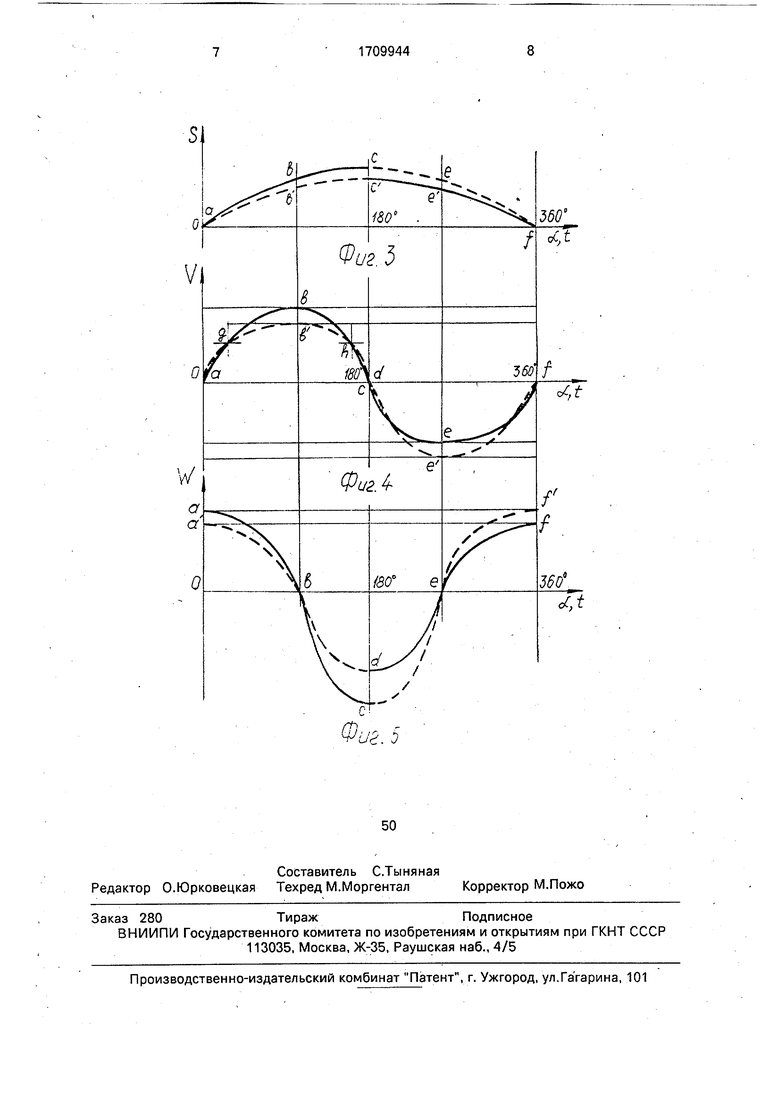
На фиг. 1 изображена схема рабочего органа ягодноуборочной машины, реализующей предлагаемый способ, вид сверху; на фиг. 2 -- то же. вид сбоку; на фиг. 3 - график закона поперечного перемещения (S) пары пальчатых секций; на фиг. 4 - график изменения линейной скорости (V); на фиг. 5, график изменения тангенциальных ускорений (W) пары пальчатых секций за полный цикл движения.
Рабочий орган ягодоуборочной машины (фиг. 1 и 2) состоит, например, из двух вертикальных пальчатых секций 1 и 2 с бичами 3. расположенных вдоль оси 4-машины, которые совершают синфазные крутильные колебания вокруг своих осей 5 и 6 соответственно, двигаясь от оси 4 и к ней. Ближнее к оси 4 положение пальчатых секций изображено сплошной линией на фиг. 1, наиболее удаленное - штрихо-вкой. При этом на ветви 7. находящиеся в канале междусекциями 1 и 2. воздействуют поочередно секция 1 (при движении ее к оси 4) и секция 2 (при движении от оси 4). На фиг. 3-5 показан полный цикл движения за один оборот приводного вала (угол поворота о: от О до 360°). При этом сплошной линией представлены графикихарактера изменения кинематических параметров (S, V и W) произвольной точки 8 бича 3 секции 2, находящегося в активном контакте с ветвями 7 растений при движении секции от оси ряда (фаза удаления от О до 180°), а также графики характера изменения кинематических параметров соответствующей точки 9 бича 3 секции 1, находящейся в активном контакте с ветвями при движении ее к оси ряда растений (фаза возврата от 180 до 360°). Пунктирной линией соответственно показаны графики характера изменения кинематических параметров точки бича, не находящегося в активном контакте с ветвями в обеих фазах движения пальчатых секций 1 и 2.
Способ реализуют следующим образом.
в начальный момент движения секции 2 из ближнего к оси 4 ряда растений положения всторону междурядья бичи 3 секции 2 имеют ускорения, большие по величине ускорений бичей 3 секции 1. При движении от оси ряда растений эта разность ускорений сводится к нулю (участки аb иаЬ на фиг. 5). При этом бичи 3 секции 1 имеют скорость движения, большую скорости бичей 3 секции 2 (участок ад, фиг. 4), имеющих активный контакт с ветвями 7. На участке кривых gh величина скорости бичей 3 секции 2 превышает величину скорости бичей 3 секции 1, причем в точках b и Ьвеличины скоростей достигают максимума. В этот момент времени величина кинетической энергии массы ветвей 7 также достигает максимума. При дальнейшем движении ускорение бичей 3 меняет свое направление (точка Ь, фиг. 5), вследствие чего уменьшается их скорость (участок be и Ь с на фиг. 4) до нуля в точке с.Таким образом, при значительной кинетической энергии массы ветвей 7 происходит торможение рабочего органа за счет роста величины ускорения, направленного против направлениядвижения бичевой секции. Бичевые секции достигают своего наибольшего удаления от оси ряда растений (точка с на фиг. 3-5). Величина ускорения бичей секции 2 достигает максимума, при котором наибольшее значение имеет сила инерции, действующая на каждую систему ягода плодоножка и имеющая противоположное ускорению направление. Это вызывает эффективный отрыв ягод и их полет по направлению действующей силы инерции от оси ряда.
В положении наибольшегоудаления бичевой секции в активный контакт с ветвями 7 входят бичи секции 1. Величина ускорения
бичей, непосредственно воздействующих на ветви, становится Существенно меньше (разность ординат точек с и d на фиг. 5) при сохранении направления этого ускорения.
Соответственно, и направление силы инерции остается прежним. Имеющий место отрыв ягод на начальном участке обратного движения происходит также в направлении силы инерции. Фаза обратного движения
0 происходит при воздействии рабочего органа, значительно менее интенсивном по сравнению с воздействием от оси ряда растение (участки сплошных линий кривых скорости и ускорения def, фиг. 4 и 5).
5 Интенсивность воздействия на обратном участке движения недостаточна для создания условий отрыва основной массы ягод. .
В области завершения полного цикла колебаний (точки а и f, фиг. 3-5) бичевых
0 секций 1 и 2 абсолютные величины их ускорений, а также их разность (отрезки ff а а, фиг. 5) существенно меньше соответственных значений ускорений и их разности (отрезок cd, фиг. 5) в положении наибольшего удаления от оси ряда (точки сие , фиг. 3), что позволяет свести к минимуму отделение ягод от ветвей в зоне, близкой к центральной продольной оси 4, и избежать просыпания ягод в зону оснований кустов.
0 Таким образом, описанный способ уборки ягод позволяет сконцентрировать зону их отделения в области наибольшего удаления рабочего органа от оси ряда, что, в конечном итоге, позволяет увеличить эф5 фективность съема ягод.
Применение указанного способа сбора ягод на плантациях черной смородины, реализуемого комбайном типа МПЯ-1А, дает увеличение полноты сбора ягод на 4-5%.
Формула изобретения. Способ сбора ягод, включающий воздействие на ряд растений синфазно вибрирующими пальчатыми секциями рабочего
5 органа путем сообщения их ветвям поперечного перемещения с ускорением от оси ряда растений большим, чем к оси ряда, отличающийся тем, что, с целью повышения эффективности, в качестве секции рабочего
0 органа используют пару закрепленных на параллельных валах рядами гребенок, причем при воздействии на растения создают ускорение перемещения по абсолютной величине ближней к оси ряда растений гребенки больше ускорения перемещения другой гребенки пары, а максимальную разность между ускорениями по абсолютной величине обеспечивают в крайнем от оси ряда положении гребенок.
Фиг. i

| название | год | авторы | номер документа |
|---|---|---|---|
| СТРЯХИВАТЕЛЬ ПЛОДОУБОРОЧНОГО КОМБАЙНА | 1997 |
|
RU2116021C1 |
| Активатор ягодоуборочной машины | 1990 |
|
SU1715235A1 |
| Способ сбора ягод | 1982 |
|
SU1115674A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1999 |
|
RU2153243C1 |
| Земляникоуборочная машина | 1991 |
|
SU1800938A3 |
| УСТРОЙСТВО ДЛЯ УБОРКИ ПЛОДОВ ФУНДУКА | 1992 |
|
RU2076567C1 |
| Ягодоуборочная машина | 1989 |
|
SU1665922A1 |
| Ягодоуборочная машина | 1985 |
|
SU1336978A1 |
| Ягодоуборочная машина | 1982 |
|
SU1050599A1 |
| ЯГОДОУБОРОЧНАЯ МАШИНА | 1969 |
|
SU249832A1 |

Изобретение относится к способам ме- •ханизированного съема ягод. Целью изр-бретения является повышение эффективности съема ягод. При механизированном съеме ягод с кустарниковых растений на ветви в поперечном направлении от оси ряда воздействуют рабочим органом (РО), установленным по обе стороны отданной оси. В процессе движения РО от оси ряда в сторону междурядья ускорение его перемещения больше, чем в обратном направлении. Максимальную разность ускоре-- НИИ создают в области наибольшего удаления РО в направлении междурядья. Ускорения прямого и обратного хода РО в данной области имеют одинаковые направления. При таком характере воздействия РО на ветви происходит концентрация зоны отделения основной массы ягод в стороне от основания кустов и направленный их полет в сторону междурядья. Это позволяет увеличить полноту сбора ягод. 5 ил.е
2,
.
.™ jj.-ji:™.i™,.
r-f-v -:: -i
ilfci i IQ.:..,
i rX IS. Hi
: ..
J
- -i/-щ--If-
%.
Si
Фие.о
| Способ сбора ягод | 1982 |
|
SU1115674A1 |
| кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
