Изобретение относится к медицинской технике, а именно к устройствам для автоматической дистракции костей.
Цель изобретения - снижение травматичности при повышении стабильности фиксации, сокращение времени установки и облегчение обслуживания.
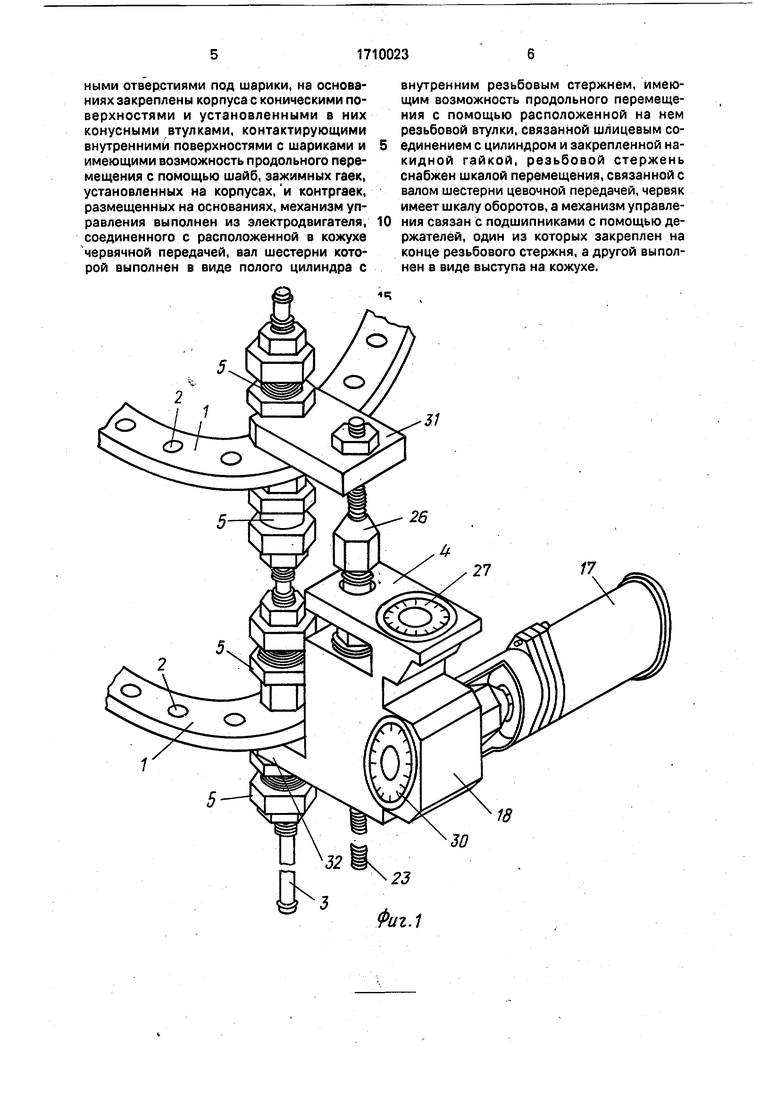
Нафиг.1 изображен фрагмент аппарата с размещенным на нем механизмом управления; на фиг.2 - кинематическая схема механизма управления, на фиг.З - подшипник и схема соединения с ним резьбового стержня механизма управления.
Аппарат содержит кольца 1 с отверстиями 2, спицами и спицедержателями, связанные стержнями 3, и механизм 4 управления. Стержни 3 выполнены гладкими и установлены в кольцах 1 посредством подшипников 5, установленных в отверстиях 2 колец 1 и выполненных из двух расположенных по обе стороны колец 1 и соединенных резьбовыми соединениями оснований б и 7 с осевыми каналами 8 под стержни 3 и радиальными отверстиями 9 под шарики 10. На основаниях 6 и 7 закреплены корпуса 11с коническими поверхностями 12 и установленными в них конусными втулками 13, контактирующими внутренними поверхностями с шариками 10 и имеющими возможность продольного перемещения с помощью шайб 14, зажимных гаек 15,установленных на корпусах 11, и контргаек 16, размещенных на основаниях 6 и 7. Механизм 4 управления выполнен из электродвигателя 17, соединенного с расположенной в кожухе 18 червячной передачей 19, вал 20 шестерни 21 которой выполнен в виде полого цилиндра 22 с внутренним резьбовым стержнем 23, имеющим возможность продольного перемещения с помощью расположенной на нем резьбовой втулки24, связанной шлицевым соединением 25 с цилиндром 22 и закрепленной накидкой гайкой 26. Резьбовой стержень 23 снабжен шкалой 27 перемещения, связанной с валом 20 шестерни 21 цевочной передачей 28. Червяк 29 имеет-щкалу 30 оборотов, а механизм 4 управления связан с подшипниками 5 с помощью держателей 31, один из которых закреплен на конце резьбового стержня 23, а другой выполнен в виде выступа 32 на кожухе 18.
Аппарат работает следующим образом.
Соответственно удлиняемому сегменту конечности подбирают кольца 1. В отверстиях на необходимых расстояниях друг от друга фиксируют подшипники 5, стягивая их основания 6 и 7. В осевые каналы 8 оснований 6 и 7 вводят стержни 3 и фиксируют их стопорными кольцами. На основания 6 и 7
навинчивают корпуса 11. В радиальные отверстия 9 оснований 6 и 7 вставляют шарики 10, а в корпуса 11 - конусные втулки 13, внутренняя цилиндрическая поверхность
5 которых удерживает шарики 10 в отверстиях 9. При этом конические поверхности 12 корпусов 11 и втулок 13 совмещаются. На основаниях втулок 13 размещают шайбы 14, которые поджимают гайками 15. При поджа0 тии гайками 15 втулки 13 перемещаются навстречу друг другу, сжимаясь за счет имеющихся у них продольных разрезов до устранения люфта между шариками 10 и стержнями 3. При этом перемещение под5 ШИПНИКОВ5 по стержням 3 должно оставаться свободным. На одном из подшипников 5 фиксируют держатель 31, который другим концом закрепляют на стержне 23 с предва-г рительно надетой на него накидной гайкой
0 26 и навинченной резьбовой втулкой 24. Втулку 24 соединяют с валом 20 и закрепляют накидной гайкой 26, навинчивая ее на вал 20. К второму подшипнику 5 этого же стержня 3 фиксируют выступ 32 кожуха 18.
5 После определения уровня проведения спиц на сегменте конечности или после их проведения кольца 1, соединенные в одном из разьемов, устанавливают на необходимом расстоянии друг от друга. Вращая вал
0 червяка29 в ту или,иную сторону, вращение передается от него на шестерню 21 и через шлицевое соединение 25 на резьбовую втулку 24. Благодаря вращению втулки 24 стержень 23 перемещается вдоль канала вала 20 в том или ином направлении, сближая или удаляя друг от друга кольца 1 через держатель 31 и выступ 32. Конечность укладывают в аппарат, кольца 1 соединяют, натягивают и фиксируют спицы в спицедер0 жателях (не показаны). Шкалы 27 и 30 устанавливают в нулевое положение. На электродвигатель 17 поступают импульсы от электронного блока управления, получа, ющего энергию от блока питания (не показаны).
Формула изобретения Аппарат внешней фиксации, содержащий кольца с отверстиями, спицами и спицедержателями, связанные стержнями, и
0 механизм управления, отличающийся тем, что, с целью снижения травматичности при повышении стабильности фиксации, сокращения времени установки и облегчения обслуживания, стержни выполнены гладкими, установлены в кольцах посредством подшипников, установленных в отверстиях колец и выполненных из двух расположенных по обе стороны колец и соединенных резьбовыми соединениями оснований с
осевыми каналами под стержни и радиальными отверстиями под шарики, на основаниях закреплены корпуса с коническими поверхностями и установленными в них конусными втулками, контактирующими внутренними поверхностями с шариками и имеющими возможность продольного перемещения с помощью шайб, зажимных гаек, установленных на корпусах, и контргаек, размещенных на основаниях, механизм управления выполнен из электродвигателя, соединенного с расположенной в кожухе червячной передачей, вал шестерни которой выполнен в виде полого цилиндра с
внутренним резьбовым стержнем, имеющим возможность продольного перемещения с помощью расположенной на нем резьбовой втулки, связанной шлицевым соединением с цилиндром и закрепленной накидной гайкой, резьбовой стержень снабжен шкалой перемещения, связанной с валом шестерни цевочной передачей, червяк имеет шкалу оборотов, а механизм управления связан с подшипниками с помощью держателей, один из которых закреплен на конце резьбового стержня, а другой выполнен в виде выступа на кожухе.
27
ui.2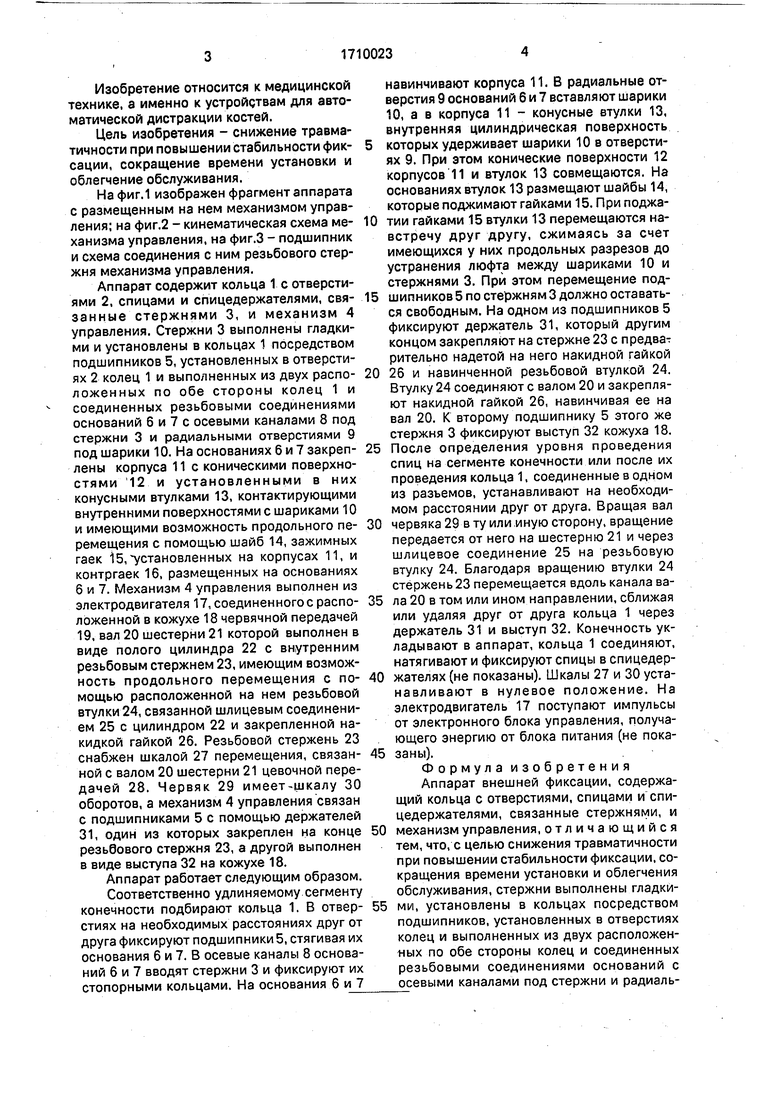
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат для репозиции и фиксации костных отломков | 1988 |
|
SU1563687A1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1998 |
|
RU2152189C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ ПЛАТОВА | 1991 |
|
RU2061429C1 |
| СЕЛЕКЦИОННЫЙ КОМБАЙН С УСТРОЙСТВОМ ДЛЯ УЧЕТА СОБРАННОЙ МАССЫ | 1992 |
|
RU2045149C1 |
| Аппарат для разработки движений в коленном суставе | 1983 |
|
SU1132935A1 |
| Устройство для репозиции переломов костей нижних конечностей | 1982 |
|
SU1074513A1 |
| Аппарат для разработки движений в суставе | 1980 |
|
SU959769A1 |
| Компрессионно-дистракционный аппарат | 1975 |
|
SU747470A1 |
| Компрессионно-дистракционный аппарат для лечения переломов дна вертлужной впадины | 1984 |
|
SU1168234A1 |
| Аппарат для остеосинтеза | 1984 |
|
SU1209198A1 |
Изобретение относится к медицинской технике. Цель изобретения - снижение травматичности при повышении стабильности фиксации, сокращение времени установки и облегчение обслуживания. Аппарат содержит кольца 1 с отверстиями, в которых'314.Механизм управления аппаратом содержит электродвигатель, соединенный с расположенным в кожухе червяком, образующим пару с шестерней. С вала 26 шестерни, в гладком продольном канале которой размещен резьбовой стержень 23, через шлицевое соединение - шарнир вращение передается на резьбовую втулку. Последняя, будучи навинченной на стержень 23, перемещает его в продольном'направлении. Движение стержня 23 через держатели передается на кольца 1, сближая или удаляя их друг от друга. 3 ил./бФиг.Зустановлены подшипники. Последние имеют возможность перемещаться вдоль стержней 3 на шариках 10. Регулировка прижатия шариков Ю-к стержням 3 осуществляется перемещением конусных втулок13,поджимаемых гайками 15 через шайбыОо»о со
| Компрессионно-дистракционныйАппАРАТ | 1979 |
|
SU848011A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
