€
Изобретение-относится к машиностроению, а более конкретно к конструкциям манипуляторов.
Целью изобретения является расширение функциональных возможностей.
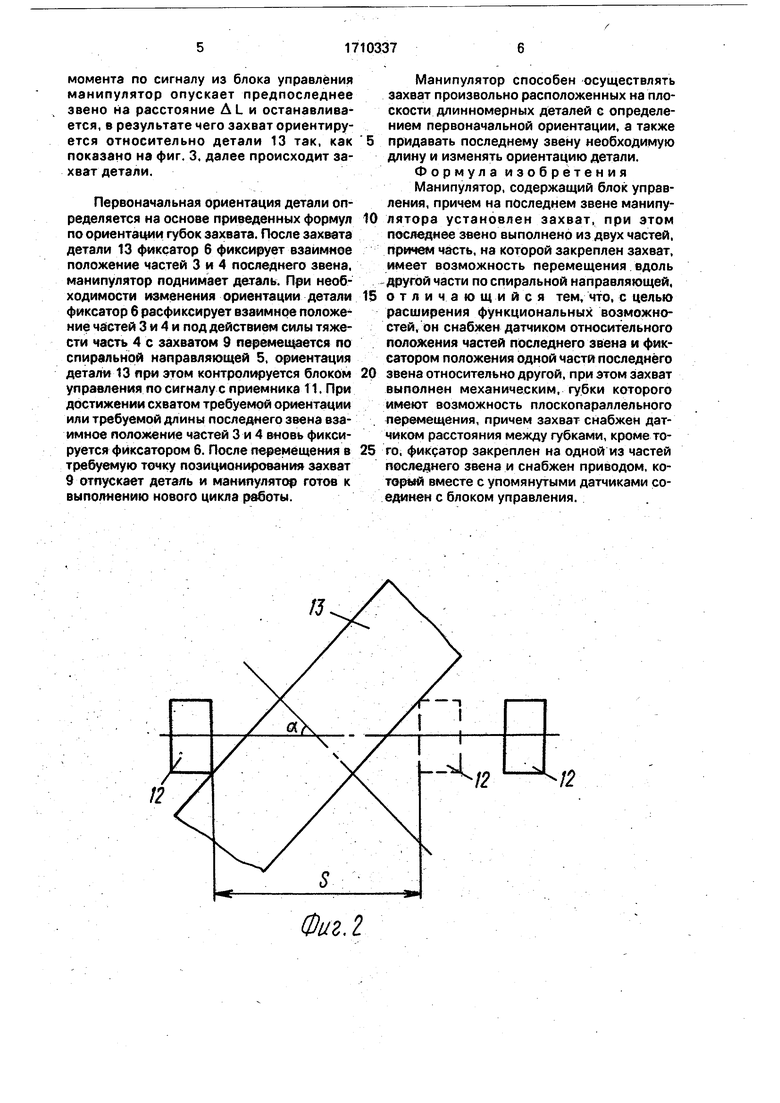
На фиг. 1 показаны последнее и предпоследнее звенья манипулятора; на фиг. 2 взаимные положения губок захвата и детали; на фиг. 3 - то же, после ориентации.
Манипулятор содержит предпоследнее звено 1, связанное посредством шарнира 2 с последним звенрм, состоящим из верхней 3 и нижней 4 частей, верхняя часть выполнена в виде полого цилиндра со спиральной направляющей 5, ось которой совпадает с осью последнего звена. Верхняя часть 3 снабжена также фиксатором 6 взаимного положения частей 3 и 4 последнего звена и приводом 7 фиксатора, например злектромагнитным. Привод 7 фиксатора б соединен с блоком управления (не показан) манипулятора. Часть 4 последнего звена связана с направляющей 5 посредством ролика 8. На части 4 закреплен механический захват 9 с датчиком расстояния (не показан) между губками, связанным с блоком управления. Для уменьшения силы трения вращения при упоре в захватываемую деталь или другую поверхность захват может быть снабжен, например, роликами. Последнее звено снабжено датчиком расстояния мезкду частями 3 и 4, который содержит источник ТО излучения, закрепленный на торцовой поверхности части 4. и приемник 11 излучения, закрепленный на части 3 и соединенный с блоком управления. Захват 9 содержит губки 12. Длинномерная Массивная деталь 13 известной заранее толщины а расположена на горизонтальной базовой поверхности, положение которой также известно заранее.
Манипулятор работает следующим образом.
В исходном состоянии фиксатор б манипулятора разблокирован и нижняя часть 4 последнего заена под действием собственной силы тяжести находится в крайнем нижнем положении. Манипулятор опускает последнее звено вертикально вниз до упора захвата 9 в верхнюю поверхность захватываемой длинномерной детали. При дальнейшем опускании части 3 последнего звена ролик 8 движется по направляющей 5 верхней части 3 и, таким образом, часть 4 движется относительно части 3 по спирали, а захват 9 вращается с упором в плоскую верхнюю поверхность детали 13. При зтом уменьшается длина последнего звена, что фиксируется датчиком расстояния между частями 3 и 4. Если первоначальная длина
последнего звена составляет Li, а первоначальное расстояние между источником 10 и приемником 11 излучения Fi, а текущее F2, то текущая длина L2 последнего звена составляет
L2 LI - FI + F2.
Угол поворота fp части 4 относительно части 3 пропорционален изменению длины последнего звена
K(Li-L2).
Козффйциент пропорциональности К определяется параметрами спиральной направляющей. Так, если шаг спирали (фиг. 1) соответствует повороту на 360°, то козффициент составляет
К « 360°/f, град/мм. Направление поворота определяется тем, какая - левая или правая - выполнена спираль. При перемещении последнего звена до упора в верхнюю поверхность детали 13 расстояние между источником 10 и приемником 11 излучения, а следовательно, и сигнал с приемника 11 постоянны. При упоре захвата 9 в верхнюю поверхность детали
13 сигнал с приемника 11 начинает изменяться, при зтом происходит вращение захвата 9 Относительно детали 13. В некоторый момент захват ориентируется относительно детали 13 так, как показано на
фиг. 2. При. движении части 3 после зтого момента, т.е. после того, как захват перестал упираться в деталь 13. захват опускается без взаимного перемещения частей 3 и 4. Сигнал на выходе «триемника 11 перестает
изменяться и по прекращению изменения сигнала блок управления определяет момент прекращения упора захвата 9 в деталь 13. Далее подается сигнал на смыкание губок захвата и свободная губка перемещается в положение, упора в деталь 13 (фиг, 2, штриховая линия), В таком положении величина угла между направлением смыкания губок захвата и перпендикуляром к оси детали связана с известной заранее толщиной
детали а и шириной губок Ь, а также измеряемым датчиком расстоянием между губками S соотношением
cos а Дт--,
S-btga
решение которого дает значение угла а, на которое необходимо довернуть захват 9, чтобы его губки быяи параллельны детали 13. Такому повороту соответствует изменение длины последнего звена на величину AL a/K. мм.
. При дальнейшем движении захвата вниз происходит упор в базовую поверхность, после чего сигнал на выходе приемника 11 вновь начинает изменяться. С этого
момента no сигналу из блока управления манипулятор опускает предпоследнее звено на расстояние AL и останавливается, в результате чего захват ориентируется относительно детали 13 так, как показано на фиг. 3. далее происходит захват детали.
Первоначальная ориентация детали определяется на основе приведенных формул по ориентаЧ|Ии губок захвата. После захвата детали 13 фмксатор б фиксирует взаимное положение частей 3 и 4 последнего звена, манипулятор поднимает деталь. При необходимости изменения ориентации детали фиксатор 6 расфиксирует взаимное положение частей 3 и 4 и под действием силы тяжести часть 4 с захватом 9 перемещается по спиральной направляющей 5, ориентация детали 13 при этом контролируется блоком управления по сигналу с приемника 11, При достижении схватом требуемой ориентации или требуемой длины послед+4его звена взаимное положение частей 3 и 4 вновь фиксируется фиксатором 6. После перемещения в требуемую точку позиционирования захват 9 отпускает деталь и манипулятс готов к выполнению нового цикла .
Манипулятор способен осуществлять захват произвольно расположенных на плоскости длинномерных деталей с определением первоначальной ориентации, а также придавать последнему звену необходимую длину и изменять ориентацию детали. Формула изобретения Манипулятор, содержащий блок управления, причем на последнем звене манипулятора установлен захват, при этом последнее звено выполнено из двух частей, причем часть, на которой закреплен захват, имеет возможность перемещения вдоль -другой части по спиральной направляющей, отличающийся тем, что, с целью расширения функциональных возможностей, он снабжен датчиком относительного положения частей последнего звена и фиксатором положения Одной части последнего звена относительно другой, при этом захват выполнен механическим, губки которого имеют возможность плоскопараллельного перемещения, причем захват снабжен датчиком расстояния между губками, кроме того, фикдатор закреплен на одной из частей последнего звена и снабжен приводом, которъ{й вместе с упомянутыми датчиками соединен с блоком управления.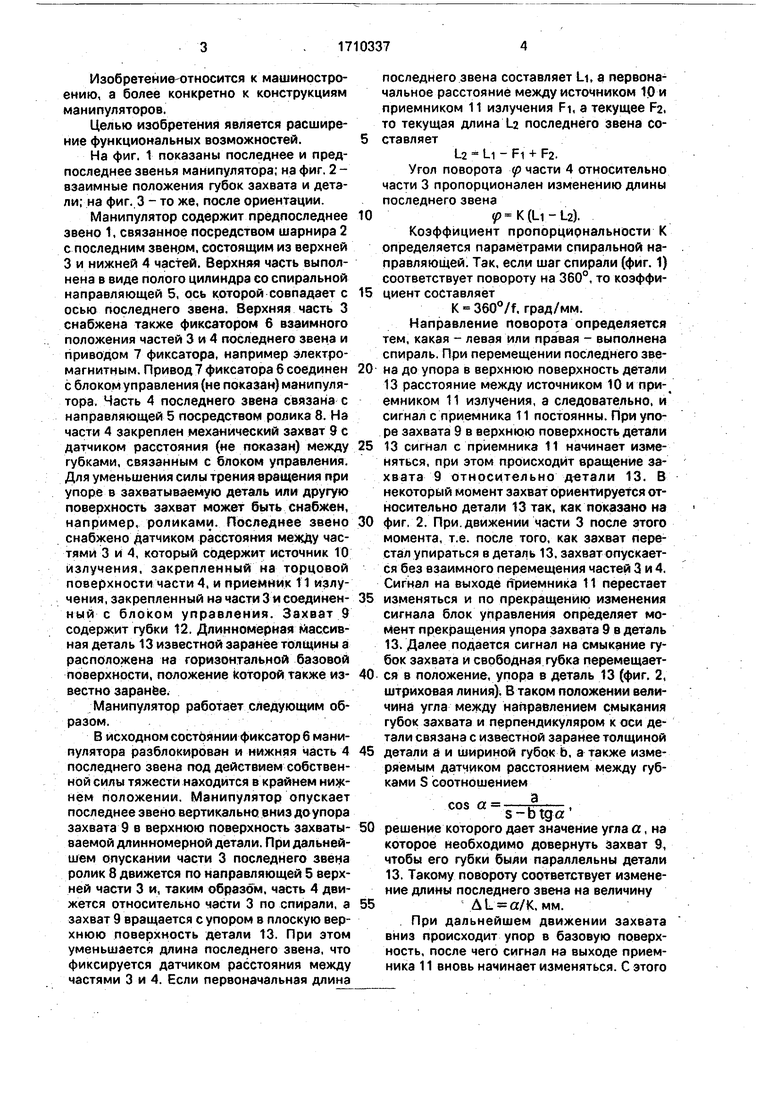
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| АДАПТИВНЫЙ СХВАТ МАНИПУЛЯТОРА | 1991 |
|
RU2021099C1 |
| Автоматическая линия для многопозиционной листовой штамповки | 1986 |
|
SU1470398A1 |
| Автооператор | 1988 |
|
SU1521576A1 |
| Автоматическая линия штамповки поворотных кулаков | 1987 |
|
SU1466868A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1991 |
|
RU2083345C1 |
| УСТАНОВКА ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ДЕТАЛЕЙ ТИПА ДИСКОВ | 1991 |
|
RU2029301C1 |
| Автоматизированный технологический комплекс | 1985 |
|
SU1349969A1 |
| Измерительный схват | 1986 |
|
SU1395481A1 |
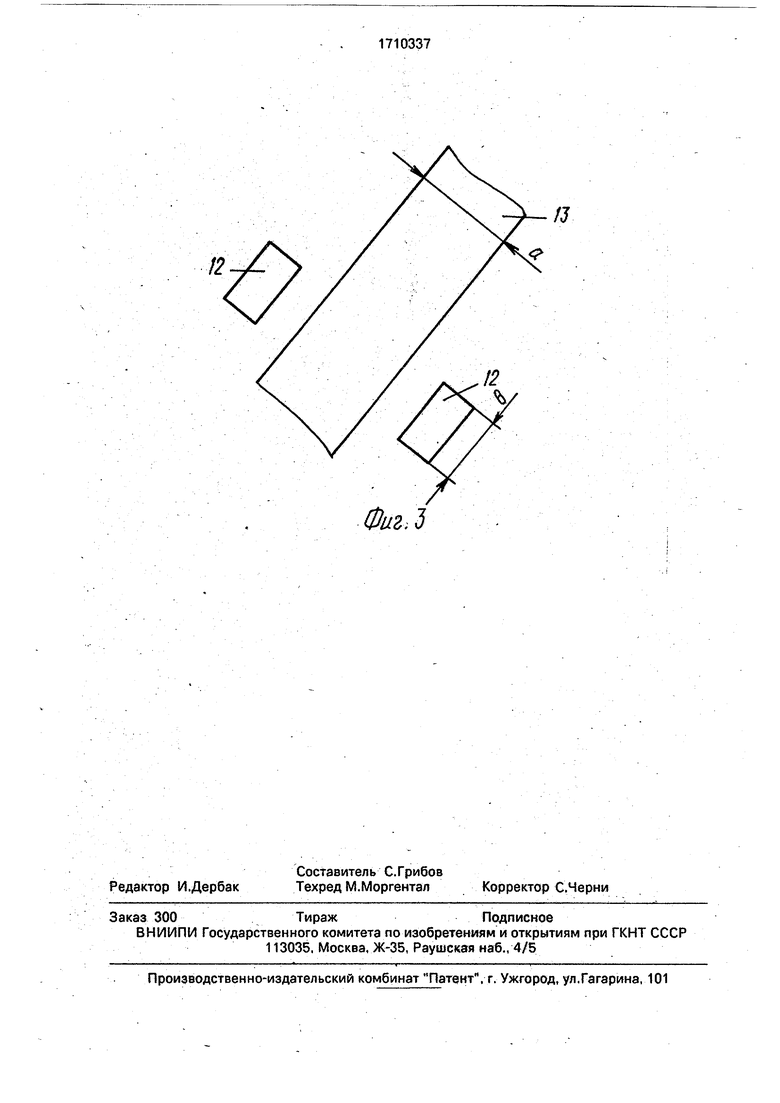
Изобретение относится к машиностроению и предназначено для использования в робототехнических комплексах. Целью изб- бретения является расширение функциональных возможностей. Верхняя часть 3.последнего звена манипулятора выполнена в форме полого цилиндра с направляющей 5 в виде спирали и снабжена фиксатором 62с приводом 7. Нижняя часть 4 последнего звена контактирует с направляющей 5 посредством ролика 8. Последнее звено снабжено датчиком относительного положения частей 3 и 4. состоящим из источника излучения ТО и приемника 11. При опускании части 3 на поверхность захватываемого предмета ролик 8 движется по направляющей 5. часть 4 осуществляет вращательное движение относительно части 3. Ориентацию захвата 9 и момент захвата определяет блок управления по сигналу с приемника 11. Зафиксировав положения частей 3 и 4. манипулятор поднимает предмет. После перемещения предмета в требуемую точку захват 9'отпускает предмет и манипулятор готов к выполнению нового цикла работы. 3 ил.л^~f+S^^ >&^^ff" s-3'to-8'€zоCA:СлЗN4 >&
/J
Фиг. г
Фиг. J
| Устройство для ориентации захвата промышленного робота | 1984 |
|
SU1207759A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
