Изобретение относится к робототехнике, в частности к захватным устройствам роботов и манипуляторов.
Известно захватное устройство, включающее П-образное основание, на котором размещены захватные элементы, выполненные в виде щеток, причем щетина выполнена из термобиметаллических пластин.
Недостатком этого устройства является невысокая надежность при захвате деталей типа тел вращения.
Известно захватное устройство, содержащее основание, на котором смонтированы захватные элементы, выполненные в виде термобйметаллических пластин.
Недостатками известного устройства являются ограниченные функциональные возмфжности и невысокая надежность захвата деталей типа тел вращения.
Цель изобретения - расширение функционаУ1ьных возможностей за счет захвата как плоских деталей, так и деталей типа тел вращения и увеличение надежности.
Поставленная цель достигается тем, что захватное устройство, содержащее основание, на котором смонтированы захватные элементы, выполненные в виде термобиметаллических пластин, снабжено колодками, на которых в шахматном порядке |размещены стержни с элементами для крепления концов пластин, при этом каждая пластина закреплена с двух концов так. чтобы в средней части пластин образовался прогиб в сторону колодки.
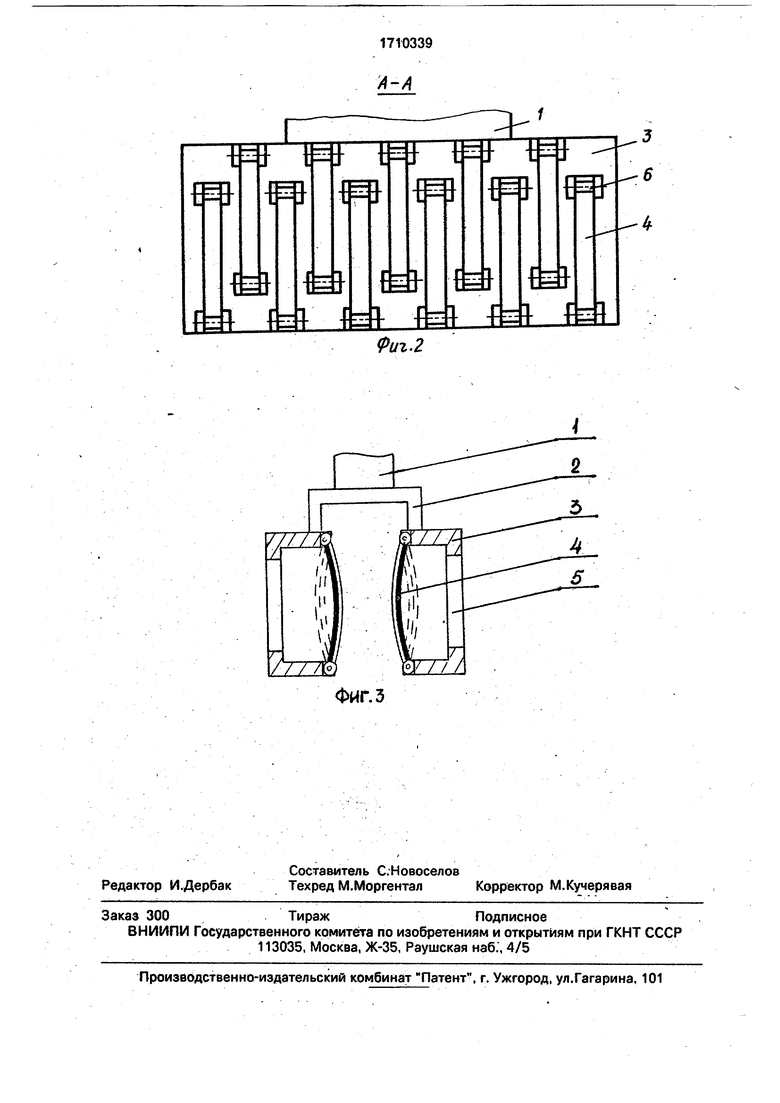
На фиг. 1 изображено захватное устройство, разрез; на фиг. 2 - разрез А-А на фиг. 1: на фиг. 3 - захватное устройство, вариант выполнения.
Захватное устройство содержит размещенное на руке 1 манипулятора основание 2, на котором жестко закреплены колодки 3 с термобиметаллическими пластинами 4. В колодках выполнены отверстия 5 для подвода и отвода тепла. Стержни 6, размещенные на колодках, снабжены элементами крепления концов пластин А, размещенных в шахматном порядке.
Захватное устройство работает следующим образом.
Деталь размещают между колодками. 3 устройства. При нагреве пластин 4, например электротоком или от детали, или других источников тепла, в пластинах 4 накапливаются термические напряжения, способные преодолеть первоначально заданные пластинам упругие напряжения. Пластины 4
импульсно перемещаются (выщелкивают) в направлении детали и захватывают ее. Закрепление пластин с двух концов позволяет задавать усилие зажатия детали путем предварительного регулирования величины
прогиба пластин в сторону от детали. По щелчку пластин 4 определяется дальнейшее выполнение операций. При охлаждении пластины 4 скачком возвращаются в первоначальное положение, при этом происходит
мгновенное освобождение детали.
Шахматный порядок размещения стержней 6 с элементами крепления концов пластин 4 позволяет осуществить надежный захват как плоских деталей, так и деталей
типа тел вращения.
Использование предлагаемого технического решения позволит расширить функциональные возможности и надежность захватных устройств с захватными элементами 1Х термобиметалла.
Формула изобретения
Захватное устройство, содержащее основание. на котором смонтированы захватные элементы, выполненные в виде термобиметаллических пластин, отличающееся тем, что. с целью расширения функциональных возможностей за счет захвата как плоских деталей, так и деталей типа тел вращения и увеличения надежности, оно снабжено колодками, на которых в шахматном порядке размещены стержни с элементами для крепления концов пластин, при этом каждая пластина закреплена с двух концов так, что в средней части пластины образован прогиб в сторону колодки.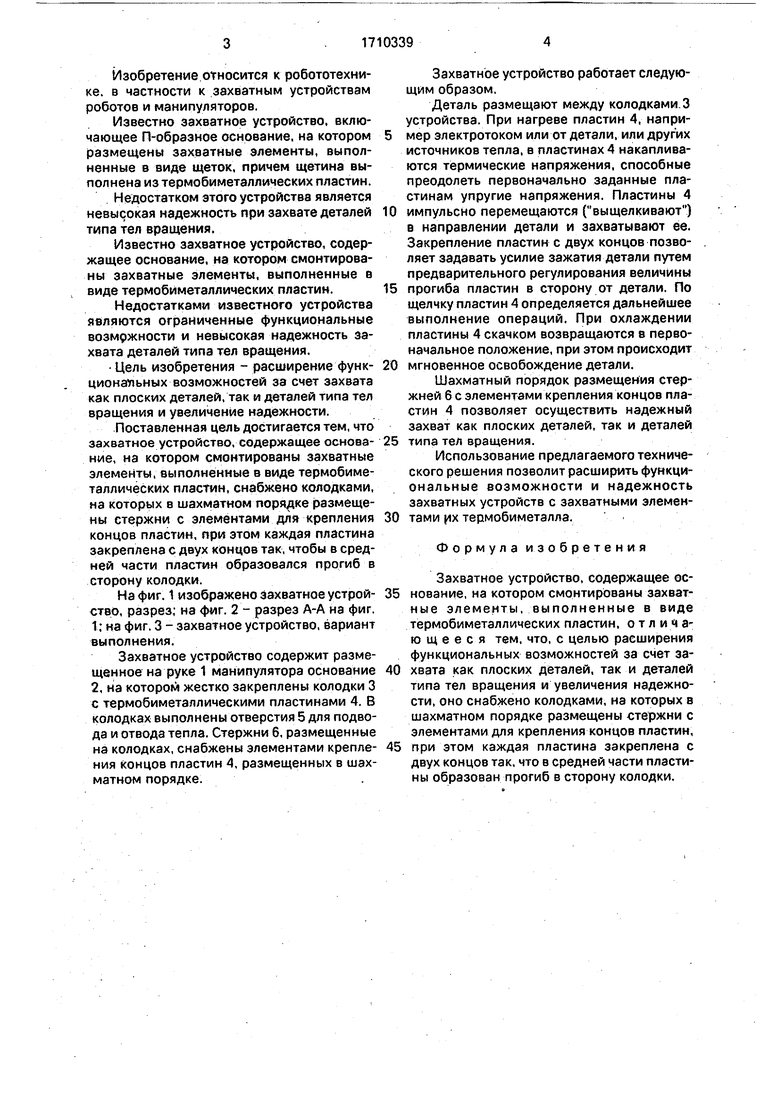
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство "Новакомас-г | 1987 |
|
SU1456309A1 |
| Захватное устройство | 1984 |
|
SU1212781A1 |
| Захватное устройство | 1983 |
|
SU1135641A1 |
| Захватное устройство | 1989 |
|
SU1743853A2 |
| Захватное устройство | 1989 |
|
SU1743854A1 |
| Захватное устройство | 1990 |
|
SU1787760A1 |
| ЗАХВАТ ПРОМЫШЛЕННОГО РОБОТА | 2008 |
|
RU2371305C1 |
| ЭЛЕКТРОТЕРМИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1992 |
|
RU2043918C1 |
| Магнитно-вакуумный захват | 1991 |
|
SU1811486A3 |
| Захватное устройство конструкции Г.М.Хачатряна и С.А.Новоселова | 1988 |
|
SU1537530A1 |
Изобретение относится к робототехнике, в частности к захватным устройствам роботов и манипуляторов. Цель изобретения - расширениефункциональных возможностей за счет захвата как плоских деталей.так и деталей типа тел вращения и повышение надежности. Захватное устройство содержит на руке 1 манипулятора основание 2, на котором жестко закреплены колодки 3. На колодках в шахматном порядке размещены стержни б с элементами для крепления концов пластин 4, выполненных из термобиметаллического материала. Для подвода и отвода тепла в колодках выполнены отверстия 5. Пластины 4 при' нагревании их электротоком или другим источником тепла импульсно перемещаются в направлении детал!/? и захватывают ее при этом осуществляется надежный захват как плоских деталей, так и деталей типа тел вращения. По щелчку пластин 4 определяется дальнейшее выполнение операций. 3 ил.Осо ы ч>&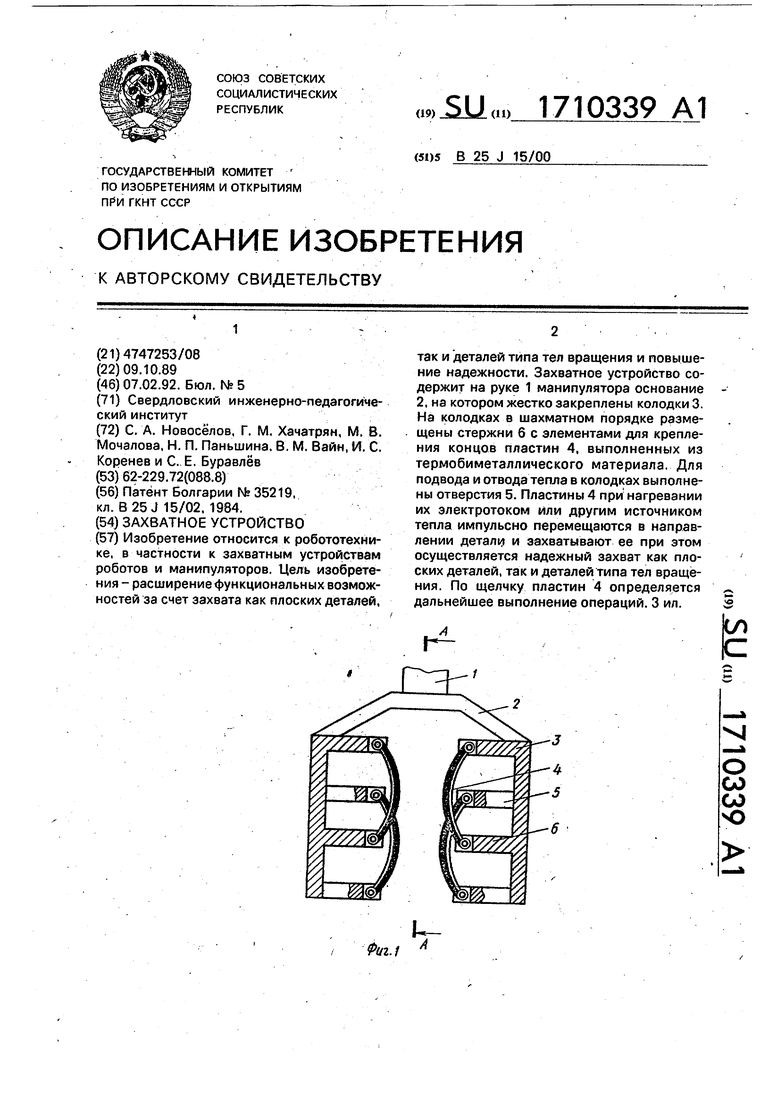
| Приспособление к трамвайным вагонам для предохранения от попадания под колеса вагонов встречных предметов | 1933 |
|
SU35219A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
